基于波束形成的目标空间特征提取
2014-12-05张钊辉李明达
张钊辉,彭 圆,庄 瑞,李明达
(水下测控技术重点实验室,辽宁 大连116013)
0 引 言
波束形成技术是一种先进的前沿技术,由于其具有灵活的波束控制、高的信号增益、极强的抗干扰能力及高的空间分辨能力等优点[1-2],被广泛应用于声呐平台的目标识别与定位。波束形成技术的主要思想是把接收传感器布置在空间的不同位置上,组成传感器阵列。在主动声呐中,空间阵列通过对回波信号的接收和处理,来提取测量目标信号的主要特征,同时抑制噪声和干扰。与一般信号处理方式的不同之处在于,由于阵列是布置在空间的不同位置,主要利用信号的时空域特性来获得增益并提取信号的时空域信息。
本文基于水中目标的回波特性,运用波束形成技术,分别对仿真、实测得到的各阵元信号进行波束形成,对波束域信号进行空间谱估计,获得目标在不同照射角度下的亮点分布情况。以获取目标的亮点分布、方位尺度等特征。
1 波束形成基本原理
由于阵元布放位置的不同,各阵元接收的信号存在时延,所以各个基元的输出存在差异。常规波数形成的基本思想是:通过延时、移相等方法对这些差异进行补偿,再将各基元的信号求和之后输出。本文以阵元均匀分布的直线阵为例,介绍波束形成的数学模型[3-6]。均匀直线阵是阵列处理中一种非常典型的阵列模型,其结构如图1所示。

图1 均匀直线阵模型Fig.1 The model of uniform linear array
假定直线阵由M 个阵元构成,阵元间距为d,声波信号入射方向角为θ,以坐标原点为参考点。设第i 个阵元的接收信号为:

式中:θ 为信号入射角;τi为第i 路信号的延时。当θ=0° 时,即信号以垂直方向入射到各个阵元,只需将各阵元接收到的信号相加,便可得到输出s(t);当θ 不等于0°时,那么第i 路信号经延时τi(θ)之后就变成si[t+τ(θ)-τi(θ)],系统输出[1,5]可表示为:

对D(θ)归一化,即可得到阵列的指向性函数。
设参考阵元处接收到的信号为Acos(ωt),一般情况下,取d=λ /2,则第i 个阵元接收信号的相位差为:
所以可得各阵元的输出[2]为

由于各个阵元接收信号得相位差不同,因此输出得到的幅度不同。根据上面分析,得到阵列的输出为:
当θ=0°,Δφ=0 时,输出取极大值主瓣方向。
综上所述,常规波束形成的原理可以描述为:多个阵元组成的阵列中,对每个阵元接收的信号进行时延或相移的补偿,得到所期望方向的入射信号相加。常规波束形成框图如图2所示。

图2 常规波束形成方框图Fig.2 Conventional beamforming block diagram
图3 为1 组仿真数据,分别为10 元均匀直线阵中单水听器输出和经过波束形成处理之后的信号输出。从图中可以看到,输出信号在做完波束形成后,旁瓣得到很好的抑制。

图3 波束形成处理前后信号对比图Fig.3 Beam forming signal before and after treatment comparison chart
2 空间谱特征提取
在时域信号中,时域信号频谱表示的是信号在不同频率上的能量分布情况,而在时空域信号中,信号的空间谱表示的是信号在空间不同方向上的能量分布。由于空间谱估计技术具有超高的分辨力[5],所以其常被称为超分辨普估计。在处理时空域信号时,经常通过计算信号的空间谱获得信号的波达方向。文献[4]中,对时域信号和空域信号进行了详细比较,如表1所示。通过比较,可以详细了解空域信号的特点。
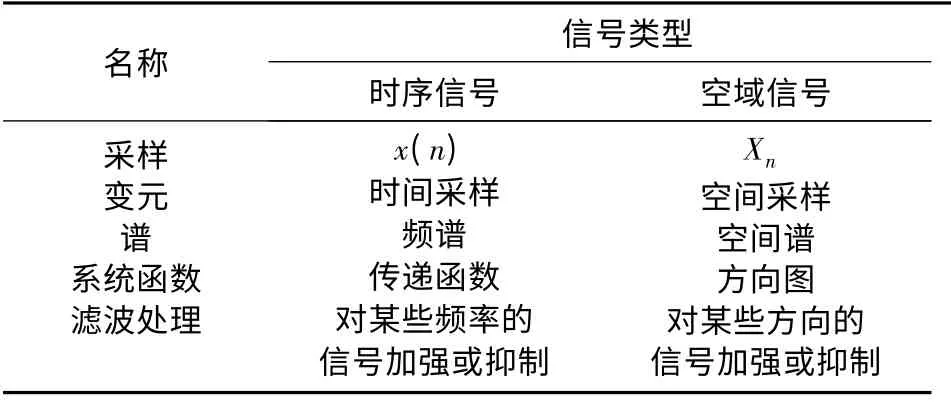
表1 时域信号与空域信号比较Tab.1 Compare with time-domain signal and airspace signal
在主动声呐中,一般认为目标回波是由布放在不同方位的空间目标反射点形成的,由于反射点的强度远强于背景的反射强度,在测量中,可以通过多波束观察波数覆盖范围之内的亮点分布情况来判定目标的方位和尺度等信息。
3 实验与分析
基于以上介绍的理论知识,分别进行仿真数据实验和实测数据的实验,并进行相应分析和论证。
3.1 仿真分析
应用Matlab 软件,仿真阵列接收信号,采用26元水平阵,阵元间距5 mm。对回波信号作波束形成,得到照射角度分别为0°,45°,90°(正横位置),180°标各部位亮点在方位-距离平面上的分布。在图3 中,阵元接收信号是根据板块元计算方法得到的某潜艇模型回波信号,仿真计算中设计的信号形式为160 kHz,脉冲宽度为0.03 μm 的CW 脉冲信号。利用窄带波束形成方法,可以得到目标模型在不同入射角度时的二维亮点图像。
由于仿真数据是在没有干扰的理想状态下进行的,所以可以清晰地看到目标的亮点分布。由于在0°和180°方向目标回波强度最大,所以亮点明显。而在照射角为90°(正衡方向)时,由于波束照射面积限制,目标回波强度较小。
3.2 实测数据分析
由于水中环境比较复杂,干扰较多,所以给水中目标的识别带来很大困难[6]。采用相同的阵型和发射信号进行实验,得到照射角度分别为0°,45°,90°(正横位置),180°的回波信号的亮点分布。图4 为实测数据的目标亮点分布图。如图所示,虽然存在许多干扰,背景比较复杂,但仍然能获得被测目标亮点分布特性。
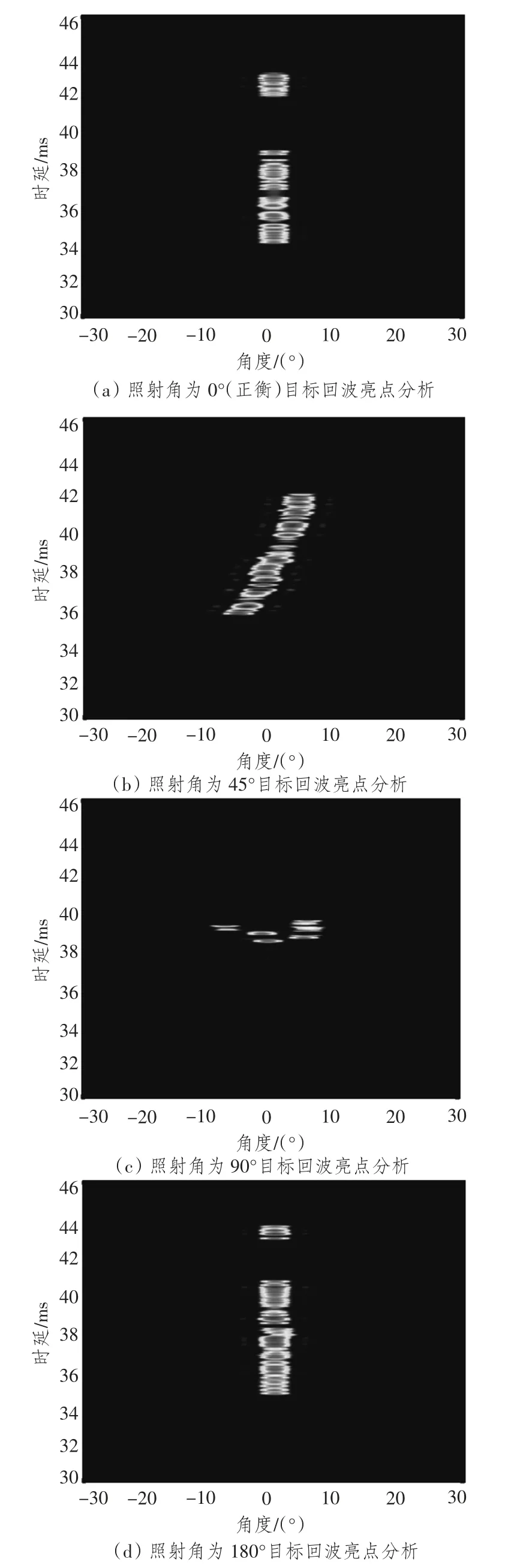
图4 不同照射角下目标回波亮点分布图(仿真)Fig.4 The highlights distribution of target echo under different angle(simulation)

图5 不同照射角下目标回波亮点分布图(实测)Fig.5 The highlights distribution of target echo under different angle(measured)
与仿真数据相似,照射角为0°时,信号纵向照射范围最大,目标亮分布最明显;照射角度为90°即正衡位置时,纵向照射角度最小,模型目标的亮点分和干扰混杂在一起,区分效果较差。
4 结 语
本文主要对水中目标的亮点分布特性进行研究,并分别进行仿真数据的分析以及实验验证。通过对目标不同旋角,以及姿态的变换,获得目标亮点分布图,并进一步获得目标的亮点分布以及方位姿态等特征,取得较好的效果。
[1]卢迎春,桑恩芳.基于主动声呐的水下目标特征提取综述[J].哈尔滨工程大学学报,1997,18(6):43-54.
LU Ying-chun,SANG En-fang.Feature extraction techniques of under water objects base on active sonar-An overview[J].Journal of Harbin Engineering University,1997,18(6):43-54.
[2]杨蕾.时延、相移波束形成技术研究[D].哈尔滨:哈尔滨工程大学,2004.
YANG Lei.Research of time-delay and phase-shift beamforming technology[D].Harbin:Harbin Engineering University,2004.
[3]田坦,刘国枝,孙大军.声呐技术[M].哈尔滨:哈尔滨工程大学出版社,2000.
[4]王永良,陈辉,彭应宁,等.空间谱估计理论与算法[M].北京:清华大学出版社,1984.
[5]CURTIS T E,WARD R J.Digital beamforming for sonar radar and signal processing[Z].1980.
[6]李启虎.声呐信号处理引论[M].北京:海洋出版社,1985.
