基于PID算法的船舶动力定位数值模拟研究
2014-12-05骆寒冰尹汉军
李 欣,谢 芃,骆寒冰,刘 鑫,尹汉军
(1.海洋石油工程股份有限公司,天津300461;2.天津大学 建筑工程学院,天津300072)
0 引 言
随着经济发展对能源的使用需求,石油资源成为经济发展的重要因素之一。多年大开发,使得陆上石油资源开始枯竭,所以海洋石油的勘探和开发将是今后石油资源开发的主要方向。海洋石油资源的开发利用,需要具备海洋施工能力的船舶来进行作业。对于传统工程船舶而言,船舶的限位方法是利用锚、缆等设备对船舶进行定位控制。对于水深较浅的海域,锚泊定位易于实现并被广泛使用。而对于深水施工的船舶而言,若采用锚泊定位的话,锚系布置、施工时间就大大的增加,施工周期延长,对施工效率不利。
动力定位技术的出现解决了深水资源开发中的船舶定位问题。动力定位技术通过控制若干个推进器的推力大小和推力方向,来控制船舶在风、浪、流载荷下在允许的偏差范围内运动。动力定位不受水深和海床的影响,可以使施工船舶的机动性增强,极大地缩短了船舶施工周期,提高了船舶效率。尤其是对于深水施工,船舶动力定位技术极大地增强了施工的灵活调动和操纵。
1957年美国研制设计的CUSS1 号船首次使用了动力定位技术。动力定位技术已经得到了很多改进和发展,并应用于多种船舶上。目前,国际上主要的动力定位系统制造商主要有挪威的Kongsberg 公司、苏格兰的Nautronix 公司和Converteam 公司。20世纪70年代,基于PID 的自航控制系统,实现了利用PID 控制算法发展出了PID 动力定位控制算法。Fossen 提出了非线性PID 控制方法[1]。除了PID 算法之外,Balchen 提出了卡曼滤波控制方法[2],使得卡曼滤波方法用于估计波浪频率从而控制船舶低频运动。国内关于动力定位的研究如边信黔[3]进行了自抗扰控制器(ADRC)的研究[4]。
本文主要针对某工程船舶在设计海况下,采用动力定位的船舶运动响应。主要计算研究在风浪流组合下的动力定位时船舶的运动和动力定位系统的推进器的推力角度输出情况。为实际工程船舶的使用提供参考,以评估该船舶的适宜施工海况,避免工程船在不利施工的海况下作业而产生不必要的损失。
1 船舶动力定位PID 控制算法
动力定位通过一系列推进器对船舶施加的推力来保持船舶位置,或以一定速度沿轨迹移动。推力的施加,需要采用实时的环境和位置监测来测量船舶的位置,并且通过计算需要施加的推力对各个推进器进行推力大小和推力方向分配。
船舶运动的基本方程为[1]:
将推力作为外力考虑,在时域计算中对外力不断地调整和变化,就可得到所需要的推力[5]:

式中,ε(t)为位置偏差值;KV为速度系数;KP为比例系数;KI为积分系数。该PID 控制器的输出控制,主要由这3 个系数决定在船舶运动和实际定位时船舶运动产生的位置偏差计算得到推力输出。
对于各个参数而言,KV主要影响船舶运动偏差位置的变化速率;KP主要影响船舶的实际位置变化的比例输出推力;KI主要消除静差,提高系统稳定。在实际控制中,由于积分作用,推力输出不会在偏差信号消失后而马上消失,而是会持续作用,直到出现负的信号影响,积分作用才会减小。而比例系数对于偏差的控制起着重要作用,比例系数的大小直接决定着位置偏差而引起的输出大小,但如果比例系数过大,会出现运动震荡反而达不到定位效果。
2 动力定位环境载荷
动力定位的推力主要用于抵抗海洋环境载荷。本文主要利用SESAM 中的SIMO 模块来模拟计算船舶在复杂环境载荷中的动力定位的运动响应,所以环境载荷的计算必须考虑。
2.1 风载荷
风速的分布采用NPD 风谱模拟风速的载荷变化,可知NPD 的风谱为[6]:

由此可得到风速的频域分布,由风谱得到风速的时域分布针对风速计算船舶的风载荷,船舶3 个自由度的受力可以利用以下公式计算到[7]:

式中:AT,AL为船舶的横向受风面积和纵向受风面积;CXw,CYw和CXYw分别为各自由度的风力系数。利用此公式可以计算出船舶主要受风载荷影响的3 个自由度的风力载荷。
2.2 流载荷
流载荷需要通过流载荷的分布计算出流速分布,由于流速比较稳定,采用定常流进行流速的模拟,流速分布采用公式[6]:

式中:VC(z0)为参考点处流速;z 为流速计算点;h 为水深。流载荷采用以下公式[7]:

2.3 波浪载荷
随机波浪使用JONSWAP 海浪谱模拟随机海浪谱如下[6]:

3 计算实例
采用SESAM 软件,对某船舶在复杂海况下的运动进行时域模拟。在SIMO 中建立推进器模型和控制算法的设定,其余的水动力系数要通过SESAM 其他模块计算。船舶的建模工作主要在SESAM 中的GeniE 模块进行,在Wadam 模块下计算船舶RAO和船舶的平均漂移力系数。船舶的DP 推进器主要考虑的是作用于船舶的二阶慢漂运动,不注重船舶一阶波浪力对船舶运动的影响。主要是由于如果考虑一阶波浪载荷则会增加能源消耗和机械磨损,考虑一阶的波浪力影响下船舶的定位能力也没有明显增加。最后,船舶的动力定位参数和推进器设置在SIMO 中进行。
船舶主尺度如表1所示。

表1 船舶主尺度Tab.1 Principal dimensions
该船舶布置了5 个推进器:船后方布置了2 个L 型主推进器,船舶前方布置了一个L 型全回转推进器,船前方还布置有2 个轴隧式推进器。各个推进器布置和计算的编号如图3所示。

图1 某船舶几何模型Fig.1 Geometry model of ship

图2 某船舶水动力网格Fig.2 Hydrodynamic mesh of ship
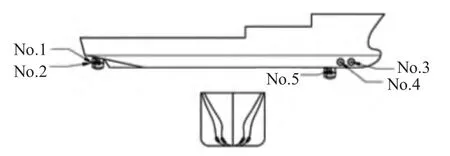
图3 船舶推进器布置Fig.3 Sketch of thruster arrange
本实例中计算具体的海况由船舶DP 设计的最大海况,选取海况分布如表2 所示。
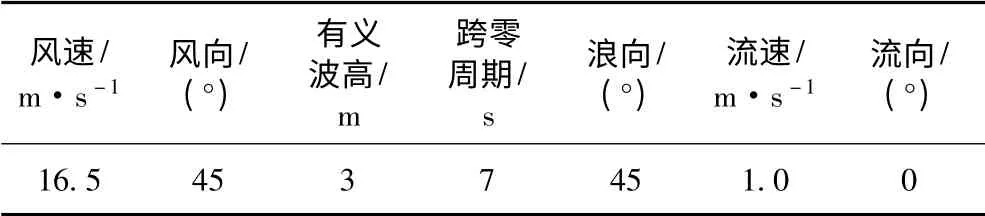
表2 海况分布Tab.2 Sea condition for calculation
对表2 分别进行动力定位时域分析,对于定位问题,主要考虑船舶纵荡、横荡和首摇运动情况。
船舶在平面上的运动时历,模拟结果如图4 ~图14所示。
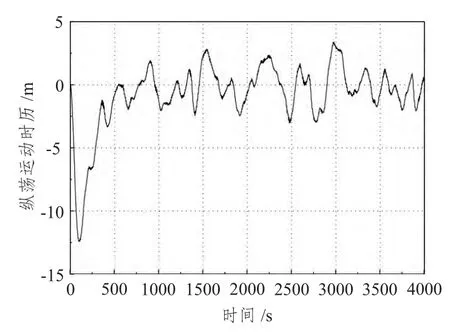
图4 船舶纵荡运动时历Fig.4 Time history of ship surge

图5 船舶横荡运动时历Fig.5 Time history of ship sway

图6 船舶首摇运动时历Fig.6 Time history of ship yaw
对于船舶推进器的推力以及角度输出结果为:
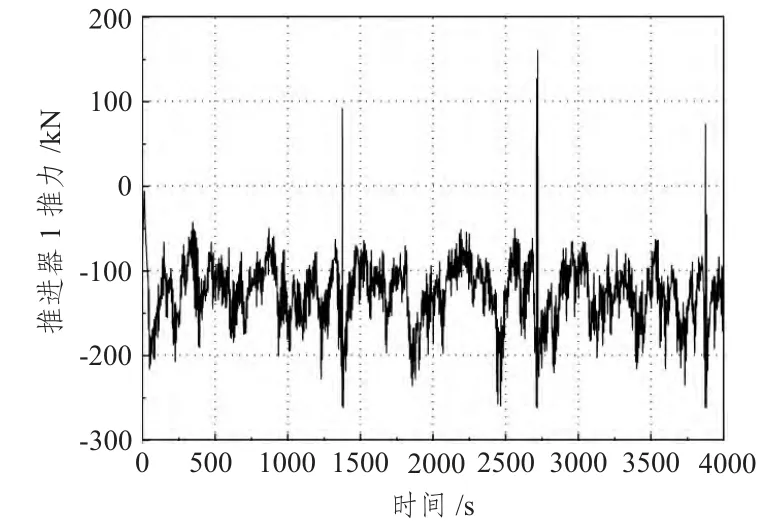
图7 推进器1 推力输出时历Fig.7 Time history of thruster No.1 force

图8 推进器1 推进器角度时历Fig.8 Time history of thruster No.1 direction
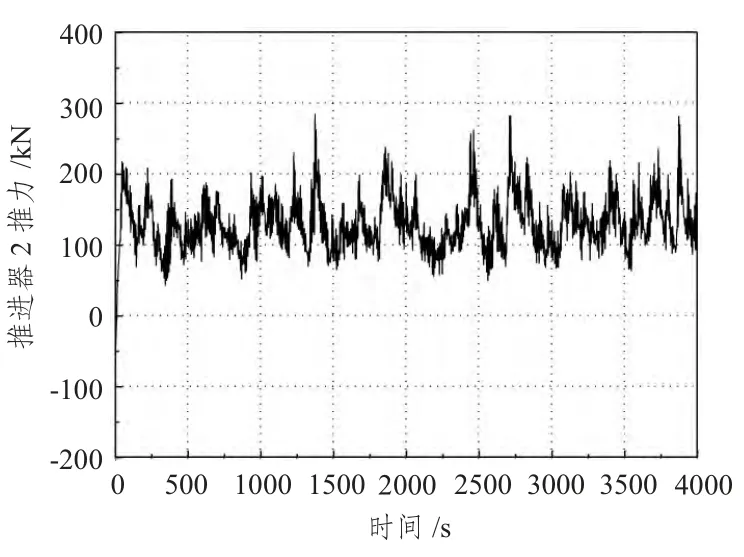
图9 推进器2 推力输出时历Fig.9 Time history of thruster No.2 force

图10 推进器2 推进器角度时历Fig.10 Time history of thruster No.2 direction

图11 推进器3 推力输出时历Fig.11 Time history of thruster No.3 force
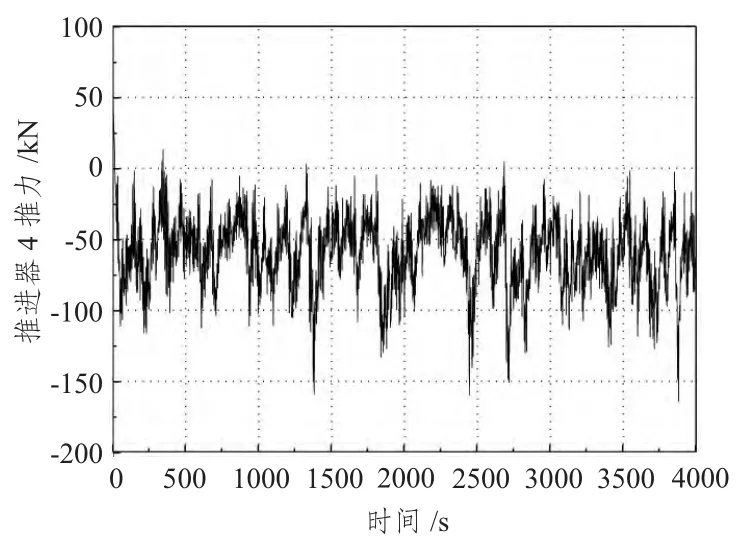
图12 推进器4 推力输出时历Fig.12 Time history of thruster No.4 force

图13 推进器5 推力输出时历Fig.13 Time history of thruster No.5 force

图14 推进器5 推进器角度时历Fig.14 Time history of thruster No.5 direction
通过计算,可以评估在5 级海况下,对船舶影响最大的平面上的运动情况:纵荡运动的振幅在3 m左右并且可以在某一平衡位置趋于稳定;横荡运动的运动幅值在稳定区域大约为3 m 左右并且可以在原始位置附近做较为稳定的运动;对于首摇运动,风浪流作用下以-8°为平衡位置运动,振幅大概为1° ~2°之间,在该海况下,首摇运动的控制比较稳定。同时,5 个推进器的推力输出和角度变化也在比较稳定的范围内。
在计算结果中,对于动力定位推力输出,在斜风、斜浪的情况下,主要由船后的2 个主推进器输出推力,首部的L 型推进器主要提供辅助作用,而轴隧推进器主要用于保持船舶水平运动的推力输出。而对于保持角度的推力输出,主要由船后的主推进器来提供水平面上的转矩。
4 结 语
本文主要针对某工程船的动力定位装置,利用SIMO 软件计算船舶在动力定位的情况下,在复杂海况下船舶的六自由度运动和船舶动力定位装置的推力输出情况。通过软件的模拟来评估船舶的动力定位情况。利用软件计算船舶的动力定位运动,可以评估船舶在动力定位时的运动和定位情况。对实际的施工起到参考和辅助作用,以避免不必要的损失发生。
[1]FOSSEN T I.Marine control systems:guidance,navigation and control of ships,rigs and underwater vehicles[M].Trondheim:Marine Cybernetics,2002.
[2]BALCHEN J G,JENSSEN N A,MATHISEN E,et al.A dynamic positioning system based on Kalman filtering and optimal control[J].1980.
[3]边信黔,付明玉,王元慧.船舶动力定位[M].北京:科学出版社,2011.
[4]边信黔,严浙平,施小成.船舶动力定位系统参数辨识方法的研究[J].船舶工程,1999(1).
[5]SIMO-Theory Manual Version3.4,MAEINTEK,2004.
[6]FALTINSEN O.Sea loads on ships and offshore structures[M].Cambridge University Press,1993.
[7]OCIMF.Predictions of wind and current loads on VLCCs,Oil Companies International Marine Forum,1994.
