关于电磁场对单摆运动控制的研究
2014-12-04范亚琳王文宁赵志骏
邢 华,范亚琳,王文宁,赵志骏
(1.承德石油高等专科学校热能工程系,河北 承德 067000;2.承德石油高等专科学校电气与电子工程系,河北 承德 067000)
1 系统方案
电磁控制单摆运动系统主要由控制模块、驱动模块、输入模块和显示模块四部分组成,下面分别对几个模块进行论证和选择。
1.1 控制模块
采用STM32F103单片机作为控制模块核心元件。STM32F103单片机采用ARM内核。一般采用哈弗结构,具有高速指令缓存和数据缓存,ARM芯片除了具有ARM核心外,还具有丰富的外设接口,例如:外扩RAM和FLASH控制器、LCD控制器、SD接口、串行接口、USB接口、I2C和I2S总线接口,此外,ARM芯片还具有低功耗、体积小等特性。ARM芯片的高性能、多接口特点决定了其比单片机和DSP更适合作为嵌入式系统的核心处理器[1]。
1.2 驱动模块
采用L298N芯片实现驱动功能。L298N是SCG公司生产的双全桥2A电机驱动芯片,L298N内含两个H桥的高电压大电流全桥式驱动器,接收标准TTL逻辑电平信号,输出功率可达25W[2]。L298N具有反应速度快、控制能力强、可控方便等优点。
1.3 输入模块
采用触摸屏输入。触摸屏可以根据菜单样式来设置按键位置,按键设置灵活,便于操作,节约单片机I/O口。同时触摸屏具有输出界面色彩可调、视觉效果良好等特点。触摸屏采用异步、全双工串口,串口模式为8nl,即每个数据传送采用10个位:一个起始位,8个数据位,1个停止位[3]。
角度传感器输入模块采用WDD35D型角度传感器。WDD35D角度传感器是一个高精度、标称阻值为0.5~10 kΩ 的电位器。其阻值偏差为 ±15%;线性度达到0.1%;线性精度为0.1%、0.3%和0.5%;功率为2 W,寿命为5 000万次;机械转角可达360°;理论电旋转角为345°;测量角度的最大偏差为0.345°[4]。
1.4 显示模块
使用TFT彩屏显示。TFT彩屏的特点主要有显示画面清晰、画面效果良好、无辐射危险、分辨率高,同时可以显示16位真彩画面,显示图片及其他颜色,画面视觉良好,可控性及编程简单,使用方便。
2 系统理论分析与计算
2.1 PWM控制技术与A/D、D/A转换
1)PWM控制原理:它是通过改变输出方波的占空比来改变等效的输出电压。脉宽调制是用脉冲宽度不等的一系列矩形脉冲去逼近一个所需要的电压或电流信号[5]。通过改变方波的占空比来改变高低电平产生的时间,从而可以调节电流和电压的大小。
2)D/A转换:单片机用于控制时往往要将运算后的控制量(数字信号)转换成模拟信号,送至执行机构或其他输出部件,这种转换称之为数/模(D/A)转换[6]。STM32F103内部集成了12位的高速A/D(D/A)转换芯片。A/D转换器是用来通过一定的电路将模拟量转变为数字量。通过A/D转换器将角度传感器的电压信号转换成单片机数字信号,然后利用单片机进行控制。
2.2 系统总体分析
方案:利用电磁铁斥力作用,摆杆受力分析见图1。
由图1可知,当摆杆垂直静止在中间位置时,摆杆就受两个力的作用:垂直向下的重力和轴的支持力。此时电磁铁若给永久磁铁一个斥力(如图1(a)所示),摆杆就会向左摆动。
然而电磁铁所给磁力的范围并不是很广,在15°范围内,所以在摆杆超过15°时就需要利用惯性使摆杆达到一定高度。当摆到最高角度时(如图1(b)所示),便会向下摆动,在角度传感器检测达到最低点时,电磁铁再次给永久磁铁一个动力,摆杆便会向右摆动,同时也会比上一次摆动的高度要高,这样反复在最低处施加斥力,摆杆就能越摆越高,当斥力最大时,此时所给的动能能够让摆杆摆到一个最大高度。经过测试,该方案测得最大摆角可达到55°,满足设计的最大45°摆角要求。因此,采用此方案设计系统的运动装置。

2.3 角度控制
实际测试表明:当电磁铁给永久磁铁最大斥力时,摆角能够摆到55°。当给不同大小的斥力时,摆角就能摆到不同的角度。在最初以最大斥力让摆杆首先起振摆动,同时用角度传感器(电位器)监测摆杆所摆到的角度,当角度传感器检测超过所设定的角度时,用PWM控制使电压减小,电磁铁所给动能也相应减小,从而使摆角逐渐减小。当小于指定角度时,利用PWM控制输出使斥力增大,动能增大,使摆角增大,最后系统经过调节会输出一个合适的电压,使摆角恒定,从而达到角度控制的作用。
2.4 周期控制
2.5 角度与周期综合控制
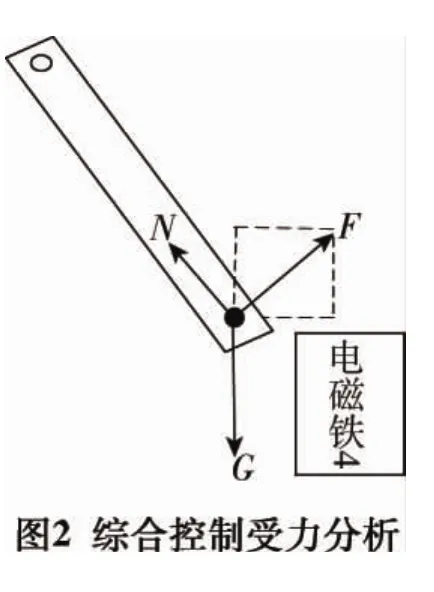
角度与周期同时控制时需在系统设计的基础上增加第4个辅助磁铁,如图2所示。
首先使摆角摆到指定角度略大一点的角度,此时它的周期在0.5 s左右,当角度传感器检测到一个指定角度(辅助磁铁所能受到力的角度),辅助磁铁4开始产生一个较小的斥力,使摆杆运动速度慢慢减小,角度传感器检测到达到指定角度时,辅助磁铁4会变成一个吸引力,吸住摆杆,延时一段时间慢慢释放,在经过最低点时,主磁铁再次给摆杆一个动能,使摆杆摆到所设角度,经过右边小磁铁稍微改变它的下降速度,再次摆到左指定角度,辅助磁铁4吸住,延时一段时间释放,这样来实现角度与周期综合控制的要求。周期的时间主要取决于辅助磁铁4吸住摆杆的时间。
3 测试方案与测试结论
3.1 测试方案
摆幅测试:1)量角器测量。利用系统自带量角器进行测量。摆动稳定后,目测并记录摆动角度。2)系统内单片机测量。首先对摆角转换成的AD值进行标定并存储在内部ROM。摆动稳定后,单片机将最大摆角所转换AD值与标定值进行比对,从而读出摆角。
周期测试:1)秒表(10 ms级)测量。摆动稳定后,使用秒表测量20个摆动周期的累积时间T1,单个摆动周期由T=T1/20计算得到。2)系统内测量。利用系统单片机自带定时器,记录稳定后,测量20个摆动周期的累积时间T1,单个摆动周期由T=T1/20计算得到。
3.2 测试结果及分析
电磁控制单摆运动系统测试结果及数据见表1。
由表1测试数据可以得出:1)4个电磁铁组成的动力系统配合角度传感器来控制摆杆运动方向和摆动幅度,通过角度传感器的反馈值,可以对4个电磁铁进行良好的控制,但是仍然有误差,对所加的电压不能控制在较好的线性范围变化。2)本系统如果找到对周期或者摆幅影响的主要因素,单独对周期、摆幅进行控制比较简单。3)综合控制摆幅和周期,主要影响控制效果的变量往往相互矛盾(如希望周期大要求中间磁铁斥力小、两边磁铁吸力大,而希望摆幅大则要求中间斥力大、两边吸力小),往往要研究新的控制方法才能达到设计要求,所以编程难度很大。

表1 周期摆脚综合测试结果
综上所述,本设计器件选择独特,硬件结构与软件设计相对比较复杂,基本达到设计要求。
[1]张勇.ARM原理与C程序设计[M].西安:西安电子科技大学出版社,2009.
[2]黄智伟.全国大学生电子设计竞赛常用电路模块制作[M].北京:北京航空航天大学出版社,2011.
[3]黄志伟,王彦,陈文光,等.全国大学生电子设计竞赛训练教程[M].北京:电子工业出版社,2010.
[4]黄志伟.全国大学生电子设计竞赛电路设计[M].北京:北京航空航天大学出版社,2011.
[5]张崇巍,李汉强.运动控制系统[M].武汉:武汉理工大学出版社,2002.
[6]徐爱华.单片机应用技术教程[M].北京:机械工业出版社,2003.
