航母编队舰载机防空体系打击联盟问题研究*
2014-12-02王俊敏周坚毅
王俊敏 李 涛 周坚毅
(1.海军航空工程学院 烟台 264001)(2.海军装备研究院 北京 100071)
1 引言
信息和网络技术的迅猛发展及其在军事领域的广泛应用,使得未来战场环境日趋复杂,作战平台之间的协同作战[1]是提高作战效能的重要手段。随着我国首艘航母的服役,航母编队的防空任务也越来越引起大家的重视。舰载机防空体系(Air Defense Systems of carrier-based Aircraft,ADSA)是指利用信息技术,把空间上分散、功能上互补的预警机、战斗机、直升机、无人机等舰载机进行组织,形成能够有效抗击来袭兵力兵器的作战体系[2]。
在ADSA 中由于单个舰载机平台限于自身能力,难以独立完成复杂的作战任务,而传统的多平台作战编组限于体制编制模式、作战思维以及随机处置的权限设置等问题,不适合分布式网络化条件下实施敏捷作战的要求。因此,具备不同作战能力的舰载机根据防空任务的需求,快速而有效地组成作战联盟将是未来一种重要的航母编队防空作战样式[3]。多舰载机平台形成“打击联盟”完成编队防空任务也成为指挥控制领域研究的一个新方向。
2 问题相关概念
2.1 舰载机防空体系网络模型
舰载机防空体系主要包括预警探测系统、指挥引导系统、火力打击系统以及信息交互系统[4~5]。基于复杂网络[6]的观点,将作战体系中的舰载机按功能抽象成为不同类型的节点,节点之间的关系抽象为边,就形成了舰载机防空体系的网络模型[7]。假设该体系有中有n个节点,m条边,则网络模型可以用图G(V,E)表示,V={v1,v2,…,vn}表示网络节点的集合,E={e1,e2,…,em}⊆V×V表示网络边的集合。图G的邻接矩阵A=[aij],其中:

如图1,舰载机平台按功能分解后对应网络中的节点,☆表示指挥引导节点,○表示探测节点,△表示火力节点;各边表示节点之间的匹配关系;箭头表示情报信息流的方向。
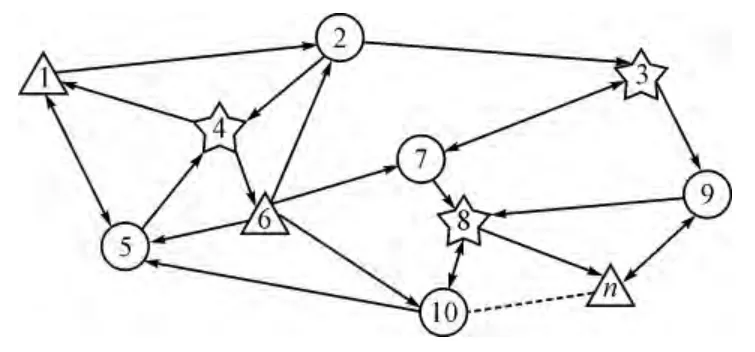
图1 舰载机防空体系网络结构模型
2.2 舰载机打击联盟
舰载机打击联盟(Attack Alliance,AA),是指ADSA 内的作战资源(功能节点)借助通信网络进行信息交互和协作,按照一定的协议和规则进行组合,有效对来袭目标实施打击而形成的临时动态组织[8],该动态组织因作战任务的存在而产生,也随作战任务的完成而解散。
在舰载机防空作战中,任何一次对目标的打击都是探测节点、火力节点和指挥引导节点之间相互协同的过程。组成某个AA 的节点可以来自于不同的舰载机平台,同时一个节点也可参与多个联盟,如图2所示。
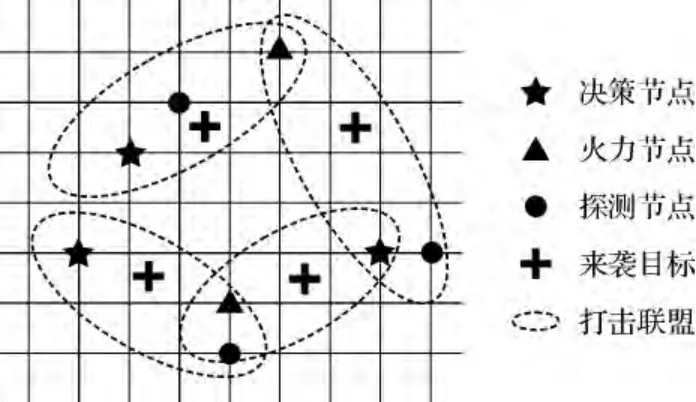
图2 打击联盟构成示意图
基于AA 的舰载机防空作战相对于传统以平台为中心的舰载机防空作战存在诸多优势:1)能扩大舰载机防空作战打击范围,增加对目标的拦截次数;2)能提高防空作战过程中舰载机的生存率;3)能提高ADSA 作战的灵活性和作战资源使用效率。
3 打击联盟及形成问题
3.1 舰载机打击联盟形成机制
ADSA 网络模型中的节点可看作智能体(Agent),不同类型的节点Agent可以通过相互协作组建AA 完成对来袭目标的拦截任务。AA 是各节点为完成防空任务而进行的临时性合作,由发现目标的探测节点发起AA 的组建。AA 的形成可分为组建、更新以及解散三个阶段。
1)联盟组建阶段
某时刻T,ADSA 网络中的探测节点发现目标之后开始组建联盟,首先根据目标状态信息和其余节点信息计算能探测到该目标的探测节点集合A,能对目标实施打击的火力节点集合B以及能指挥该次打击任务的指挥引导节点集合C。将自己的ID、目标信息等向集合A∪B∪C发布,并从A中选择相应的工作盟员。B与C中的成员在接收目标信息之后,与自身的状态信息进行匹配,如果满足任务需求则按一定的协同规则组建AA;如果集合B与C中的成员都不符合要求,则由编队对空方面作战指挥中心决定是否指派相应功能节点组建AA。
2)联盟更新阶段
当满足以下条件时,需要更新AA:(1)当目标达到联盟探测节点搜索范围极限时,应根据阶段1)重新分配新的探测节点以保证目标探测跟踪的连续性。(2)当AA中的功能节点失效时,应把符合条件的新节点加入到当前AA或从当前联盟中移除失效的节点。
赫鲁晓夫外交政策的独特特征是开始重视亚非新兴国家,改变之前对中立主义的否认态度,承认不结盟的意义与合理性。[55]苏联对缅甸中立外交政策给以很高评价,特别是缅甸拒绝参加美国组织的东南亚条约组织。[56]斯大林时代的结束、苏联外交政策调整带来的连锁效应,很快在中苏两国与缅甸的关系上先后体现出来,同时这些调整和变化在缅甸国内也得到积极的响应。
3)联盟解散阶段
AA中的指挥引导节点根据对目标打击的毁伤效果决定是否再次实施攻击,如果目标被摧毁,则宣布针对该目标的AA解散。
3.2 问题的数学描述
AA可看作是目标-火力节点-指挥引导节点-探测节点之间的组合。假设T时刻的目标集合TARGET={t1,t2,…,tNT},火力节点集合WEAPON={w1,w2,…,wNw}、指挥引导节点集合GUⅠDE={g1,g2,…,gNg}以及探测节点集合DETECTOR={d1,d2,…,dNd},ADSA在T时刻的系统状态可以表示为一个五元组:State(T)=〈TARGET(T),WEAPON(T),GUⅠDE(T),DETECTOR(T),RT-W-G-D(T)〉,其 中RT-W-G-D(T)为节点之间的匹配关系集合。
对于RT-W-G-D(T)={r1(T),r2(T),…,rn(T)},若T时刻的分配结果为dl∈DETECTOR负责探测跟踪目标ti∈WEAPON,wj∈WEAPON负责打击目标ti,gk∈GUⅠDE负责为wj发射的导弹提供制导控制,则称ti、wj、gk、dl在T时刻具有匹配关系ri(T)。具有ri(T)的ti、wj、gk、dl组成一个打击联盟AAi(T),可表示为AAi(T)=〈ti,wj,gk,dl〉,其中,0<i≤NT,0<j≤NW,0<k≤NG,0≤l≤ND。对于AAi(T)=〈ti,wj,gk,dl〉,称T时刻wj、gk与dl隶属于同一个临时火力打击单元。
对于相同的目标,不同的节点组合对其打击的效能不同,而ADSA 中所有AA 的形成方案也直接决定了整个体系的作战效能。由此,打击联盟形成(Attack Alliance Formation,AAF)问题即是指如何根据实时空战态势和作战任务信息,动态灵活地调整体系内功能节点间的动态匹配关系RT-W-G-D(T)集合,使得该集合对应的ADSA 整体作战效能最优。
4 打击联盟约束优化模型
AAF问题属于任务分配范畴,该类问题一般研究思路为先建模后根据模型特点选择合适的算法进行求解,构建AAF 模型首先要确定问题的目标函数以及模型的约束条件。
4.1 目标函数

形成AA分配方案的目的是使整个体系作战效能最佳,即敌方损失最大或我方编队损失最小。以敌方损失最大为例,假设thdi为目标ti的威胁度,则建立目标函数:
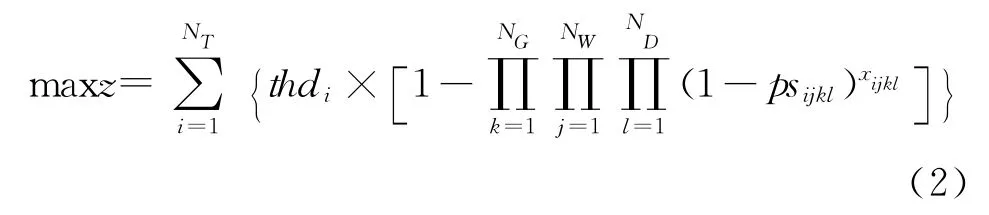
4.2 约束条件
1)任务约束。每个目标节点必须分配一个火力节点进行拦截:
2)目标捕获约束。每个火力节点必须至少获得一个探测节点的信息进行目标捕获提示:

3)导引约束。对于∀ti∈T,若火力节点wj∈AAi,则须为ti和wj分配一个制导通道进行控制:

4)弹药约束。对于火力节点wj,被分配的目标总数应满足不大于其平台机载空空导弹总量MⅠSj:

5)制导容量约束。指挥引导节点可以为多枚空空导弹同时提供制导,制导的导弹数量应不大于其最大制导容量GCk的限制,该约束条件为:

6)态势约束。考虑目标对我方舰载机的空中威胁,在空中态势处于一定劣势的情况下则不能实施对目标的攻击。设αji、βki、δli分别为wj、gk、dl相对目标ti的空战优势函数值,该约束条件应满足:
其中,c1、c1、c1分别为AA中火力节点、指挥引导节点、探测节点的权系数,θ为交战风险阈值。
4.3 方法探讨
AA 约束优化问题在本质上属于多任务分配[9]问题范畴。目前,多任务分配问题的研究思路为先建模,后根据模型特点选择合适的算法进行求解。AA 约束优化模型具有如下特征:
1)NP完全问题:AA 约束优化模型的求解是经典的NP完全问题,即解空间维数随问题规模的增大而呈指数性增长,真正的最优解只有通过枚举法才能找到。
2)非线性:AA 约束优化模型为非线性整数规划模型,模型中的目标函数是凸函数,而且约束条件较多,优化曲面较为复杂,无法进行解析求解。
3)离散性:决策变量取值是离散的,因此不能采取微分处理的方式获取最优解。
4)非均匀解空间:AA 约束优化模型的解空间是非均匀的,即对解空间中的任一解来说,与其周围相邻的解所对应的目标函数可能相差较大。
分析上述AA 约束优化模型的数学性质可知,在现代舰载机防空作战条件下,根据战场动态实时地求解AAF问题的全局最优解是不现实的,只能在规定的时间内求其满意解。对于大规模AA 约束优化模型的求解,智能优化算法[10~11]将体现较大的优越性。智能优化算法的优点是对模型的可导、连续以及单峰等数学性质无严格要求,通用性、鲁棒性较好,大部分算法求解的效率较高,能够较好地满足AA 约束优化模型的求解需求。
5 结语
本文在分析ADSA 结构的基础上,将体系中的作战资源按功能抽象成为节点建立了防空体系的网络模型。根据舰载机网络化防空体系作战资源组合的特点,提出了舰载机打击联盟概念,并从AA 角度对体系中的作战资源指挥控制问题进行研究,建立了拦截联盟形成问题的数学模型。针对模型的特征,提出了采用智能优化算法对模型求解的一些设想,为后续的研究工作提供了理论依据。下一步将重点研究AA 形成方法的具体实现,并通过构建基于Agent的ADSA 仿真系统对方法进行仿真验证和分析。
[1]陈正,李田科.多机超视距协同空战协同力学模型研究[J].舰船电子工程,2013,33(1):28-31.
[2]贾子英.舰载机防空作战体系对抗问题研究[D].烟台:海军航空工程学院,2013.
[3]于全,译.分布式网络化作战[M].北京:北京邮电大学出版社,2006.
[4]田秀丽,纪玲利,马宏刚.防空体系作战能力灰色聚类评估[J].现代防御技术,2006,34(2):6-9.
[5]张明,于小红,王成志.基于组成要素的作战体系构建方法研究[J].军械工程学院学报,2008,20(6):1-3.
[6]王斌,谭东风,凌云翔.基于复杂网络的作战描述模型研究[J].指挥控制与仿真,2007,29(4):12-16.
[7]李青,王瑜,宋明明.复杂环境下防空体系效能评估的网络环模型研究与应用[J].指挥控制与仿真,2009,31(4):59-61.
[8]Bonnie W Y.Future Integrated Fire Control[C]//10th Internationa1 Command and Control Research and Technology Symposium(ICCRTS),2005:189-192.
[9]Chen G,Curz J B,Jr.Genetic Algorithm for Task Allocation in UAV Cooperative Control[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,Austin,Texas,2003:11-14.
[10]梁艳春,吴春国,时小虎,等.群智能优化算法理论与应用[M].北京:科学出版社,2009.
[11]王磊.协同攻击任务规划认知演化计算研究[D].长沙:国防科技大学,2010.