光电跟踪伺服转台控制技术*
2014-12-02
(中国电子科技集团公司第27研究所 郑州 450047)
1 引言
伴随精确制导武器系统的不断发展和战略战术的更新换代,美欧等西方发达国家纷纷把发展精确制导武器的重点转向了防区外中远程精确打击武器之上[1]。发展“大功率激光对抗武器系统”不但可以使我军现有的激光对抗装备干扰精度和干扰距离得到大幅度的提高,而且可有效对抗中远程精确打击武器这一新的作战目标,也可初步具备近距离损伤传感器的能力,能在对付具有较强抗干扰能力的采用新型红外焦平面成像器件的精确制导武器方面发挥更大的作用。
在光电对抗装备中,精密捕获、跟踪、瞄准系统担负着相当重要的角色,它与一般光电测量系统的区别在于,它不仅要求将运动目标稳定跟踪在规定视场内,而且要求将光束锁定在目标某一点上,一般要求跟踪精度小于经扩束后的激光发散角的16.7%~20%。在这样的高精度下,大气湍流、地基振动等影响是不可忽略的[2]。一般光电测量系统中的大惯量单轴跟踪架由于结构谐振频率的限制,不可能有足够的带宽对其校正,于是引入复合轴控制,即采用具有高谐振频率结构的复合轴系统分粗跟踪和精跟踪来实现角秒级的效果[3]。此外,采用旋转变压器作为位置传感器的电机,它具有转动惯量小、输出力矩大、行程范围大、响应快等特点,使子系统结构更紧凑,体积、惯量大幅度下降,摩擦力矩减小,谐振频率更高,响应速度更快。本文在理论分析的基础上,对光电跟踪转台进行了仿真和实验,得到了优良的效果。
2 光电跟踪系统组成
典型的光电控制系统包括以下几个部分:精密跟踪转台设备、目标探测设备、跟踪控制设备、智能管理设备和电气连接与配电设备。

图1 系统组成框图
1)ARM9控制器
ARM(Advanced RISK Machine),于1985年在剑桥的Acorn 计算机公司诞生[4]。ARM 包含众多系列的产品,其具有高性能、低功耗和低成本等显著优点,是嵌入式处理器中应用最为广泛的一个系列,本设计系统使用ARM9微处理器系列。
ARM9系列处理器在高性能和低功耗方面提供最佳的性能,采用五级整数流水线,提供1.1MIPS/MHz的哈佛结构,支持32位的高速AMBA 总线接口。提供全性能内存管理单元(MMU),支持WindowsCE、Linux、Palm OS等多种嵌入式操作系统。
2)PWM 功率驱动
由于直流电动机要求工作在正反转的场合,本系统采用双极性驱动的可逆PWM 系统,选择体积小、功率大集成驱动电路、功放电路、过电压电流检测及热过载保护电路的SA03作为功率驱动器件,ARM9的定时计数器比较单元根据软件控制算法计算出PWM 控制量,输出一定频率的调宽波,由输出引脚GPIO0 经光耦6N137 给至SA03 的+PWM 引脚。将SA03 的保护电机的引脚接入CPLD,同时接入CPLD 的还有ARM9 停止信号、ARM9运行信号,瞄准镜机械位置的上限和下限信号,在CPLD 中编写相应的保护逻辑电路,以避免程序运行死锁或跑飞导致负载电机飞车。
3 转台控制策略
控制系统设计中重要的一个环节就是要选定控制系统的控制方法[5]。一般情况下,一个控制系统可有多种技术途径实现系统性能指标要求,控制方法不存在哪一个是最好的,只有稳定可靠的,适应系统性能要求的才是最好的设计。常用的光电跟踪控制系统包括复合控制、共轴跟踪、智能控制等[6]。
3.1 复合控制
复合控制是在一般目标位置偏差控制的基础上,引进目标速度控制的双变量控制系统,它是一种开闭环控制系统,即目标位置偏差控制采用闭环控制,目标速度控制采用开环控制。
3.2 共轴跟踪控制
共轴跟踪是计算机技术与复合控制技术结合产生的一种新思想[7]。它分成两部分,一部分由计算机接收传感器的测量数据,进行滤波、预测,提供准确的角位置、角速度等信息;另一部分完成伺服驱动任务,以第一部分输出的角位置信号为输入,以角速度及高阶导数信号为辅助输入,构成复合控制系统,引导光电跟踪设备跟踪目标。
共轴跟踪的关键是滤波预测技术,预测目标位置、速度和加速度等运动状态量。常用的滤波技术有多种,有限记忆最小平方滤波、α、β、γ滤波、自适应滤波和kalman滤波等。

图2 共轴系统控制机构图
3.3 智能控制
智能控制是自动控制理论发展里程中的一个崭新阶段。首先,它突破了传统控制理论中必须基于数学模型的框架,其次它继承了人脑思维的非线性,智能控制器也具有非线性特征[8]。传统的PID控制系统的控制策略是固定不变的,为了获得良好的控制性能,控制器必须根据控制系统的动态特征不断地改变或调整控制策略,从而使控制器本身的控制规律适应于控制系统的要求。
4 转台控制关键技术
4.1 非线性规范模型跟踪控制
仿真结果表明:在PI调节+滞回控制系统(HYS)控制的交流电机速度控制系统中保持控制对象的参数不变,能够实现快速、无超调的良好响应,参数若变化,系统响应就会恶化。而采用非线性规范模型的跟踪控制,可有效抑制参数变化对系统的影响。
非线性规范模型跟踪控制系统的原理如图3所示。
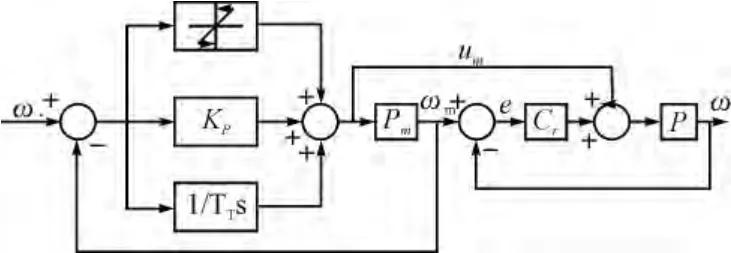
图3 非线性规范模型跟踪控制系统原理图
4.2 模糊自适应PID 控制器
在复杂控制系统中,由于被控对象的时变性、非线性和不确定性,传统PID 控制难以取得很好的控制效果,而模糊控制对数学模型的依赖性弱,不需要建立过程的精确数学模型[9]。因此将模糊控制策略和传统PID 控制相结合的模糊自适应PID,使系统具有模糊控制的灵活性和适应性强的优点,又具有PID 控制精度高的优势。
自适应模糊PID 控制器以误差和误差变化率作为输入,可以满足不同时刻的和对PID 参数自整定的要求。利用模糊控制规则在线对PID 参数进行修改,便构成了自适应模糊PID 控制器,其结构如图4所示。

图4 模糊自适应控制器结构
自适应模糊控制器可以通过以下步骤实现:
1)模糊化
所设计的模糊控制器采用双输入单输出形式,输入为误差E、误差变化EC,输出量为U,它们分别是实际速度跟踪误差e,误差变化ec和输出控制电压u的模糊语言变量。
实际变量表示为

其中ωR(k)、ωL(k)分别为k时刻给定参考值和实际值,f(e(k)、ec(k))表示输入与输出关系函数。考虑到在实际系统中变量的不对称情况,设e、ec和u的实际变化范围(即基本论域)为[emin,emax]、[ecmin,ecmax]及[umin,umax],其归一化模糊论域为[-3,3],论域正规化变换公式为[10]

其中ke、kec为输入变量量化因子,ku为输出变量比例因子。
2)模糊推理
E、EC和U均采用相同的模糊子集{NB,NM,NS,Z,PS,PM,PB},其隶属函数如图5所示,采用对称、均匀分布、全交迭的三角形形式。

图5 成员隶属函数
应用常规模糊条件和模糊关系“IF Ai and Bi THEN Ci”形式建立的模糊规则如表1所示。根据Mamdani的min-max推理法则,可得出采用加权平均解模糊化的模糊控制输出为[11]

3)清晰化过程
故实际控制输出量:

模糊控制属于智能控制的范畴。单纯地将一个模糊控制器用于高精度伺服驱动系统并不能得到十分满意的性能,只有和其他控制方法(如非线性规范模型跟踪控制等)相结合才能得到优良的性能。
4.3 试验结果
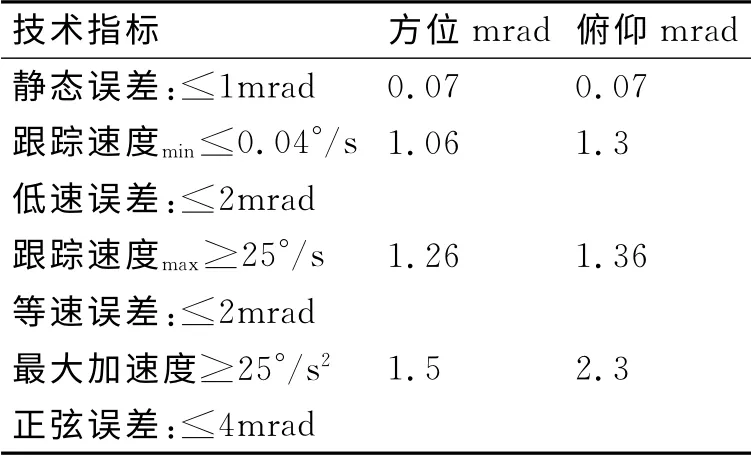
表1 伺服系统跟踪精度
用阶跃信号、三角波信号和正弦信号作为系统输入信号测试伺服系统的性能。试验结果如表1所示。从试验结果可以看出,系统静态误差小,稳态精度高,对含有加速度和加加速度信号的正弦信号的跟踪误差也满足指标要求。系统具有良好的动、静态性能,并具有很好的实时性和较好的可靠性。
5 结语
本文依据光电跟踪伺服系统的设计实践,阐述了伺服转台的功能及其发挥的重要作用。介绍了系统使用的处理器系统和控制细节。分别详细说明了交流伺服电机的工作原理和内容。脉冲宽度调制PWM 的电机驱动方式,可以完成对伺服系统的速度控制要求,能有效地响应系统的跟踪时间,满足了系统的需求。带增量式的PID 控制策略使系统获得了较高的跟踪精和优良的动态品质,系统工作指标完全满足要求。
[1]陆陪国,寿少崚.舰载光电系统高精度跟踪控制技术[J].应用光学,2006(6):477-484.
[2]李士勇,夏承光.模糊控制和智能控制理论与应用[M].哈尔滨:哈尔滨工业大学出版社,1990.
[3]寇宝泉,程树康.交流伺服电机及其控制[M].北京:机械工业出版社,2008.
[4]范书瑞,赵燕飞,高铁成.ARM 处理器与C 语言开发应用[M].北京:北京航空航天大学出版社,2008.
[5]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991.
[6]秦继容,沈安俊.现代直流伺服控制技术及其系统设计[M].北京:机械工业出版社,1999.
[7]陈伯时.电力拖动自动控制系统-运动控制系统[M].北京:机械工业出版社,2003.
[8]张德丰.建模与仿真精讲实例[M].北京:机械工业出版社,1999.
[9]王正林,王开胜,陈国顺.Matlab/Simulink与控制系统仿真[M].北京:电子工业出版社,2005.
[10]周乃新,洪学寰,袁伟,等.陀螺稳定平台控制算法比较研究[J].实验科学与技术,2011(4):10-12.
[11]白云同.电磁兼容技术[M].北京:北京邮电大学出版社,2004.