弹射中舰载机快速传递对准技术
2014-12-02杨功流王丽芬袁二凯乔立伟
杨功流,王丽芬,袁二凯,蔡 玲,乔立伟
(1.北京航空航天大学 仪器科学与光电工程学院,北京100191;2.惯性技术国防重点实验室,北京100191;3.天津航海仪器研究所,天津300131)
0 引 言
舰载机起飞之前需要完成机载惯导系统的初始对准,而当舰艇遇突发情况需要舰载机紧急起飞时,则要求机载惯导能在极短时间内完成初始对准。如在对方突然袭击(如潜艇发射反舰导弹)的情况下,留给舰载机的截击时间一般不超过3min[1],这其中包括指挥反应时间、舰载机和上甲板部门的准备时间、舰载机惯导的初始对准时间,以及舰载机弹射(或滑跃)起飞时间等。因此,舰载机惯导的快速对准一直受到各国的高度重视。
从理论上讲,舰载机起飞前、起飞过程中以及起飞后均可以利用外部信息对机载惯导进行初始对准,分别称之为甲板对准、弹射对准和空中对准。传统甲板对准的时间较长,一般需要5-8min;空中对准一般需要借助GPS 等卫星导航系统,在战时容易因GPS 受干扰而导致对准失败。由于舰载机弹射过程中机体的运动加速度较大,有利于提高系统的可观测性,因此本文提出了分阶段对准方案,即以舰/机惯导弹射过程中的传递对准为“粗对准”阶段,起飞后实现“精对准”的舰载机快速传递对准方案,并重点对舰载机弹射过程中传递对准的约束条件及环境影响因素开展研究。
1 舰载机弹射起飞
舰载机弹射起飞是借助弹射器的牵拉,在较短的甲板长度之内以及极短时间内达到离舰起飞要求的最小速度,从而完成起飞。舰载机弹射起飞方式中,存在一个关键装置和一项关键技术,即弹射器和前轮拖拽弹射方式,其中后者是实现舰/机惯导传递对准的外部约束条件之一。
1.1 弹射器
弹射器的研究最早开始于20世纪初,1912年美国海军采用压缩空气做功原理设计了第1 台试验用弹射器,此后各国的工程师先后设计了气动盘式弹射器、飞轮弹射器、液压弹射器及蒸汽弹射器等。随着技术的发展,电磁弹射器以其可控性好、快速反应能力强、可靠性高、效率高、体积小、质量轻,及维护和使用费用低等优点,逐渐取代蒸汽弹射器,开始登上历史舞台。美国计划在2013年后服役的新一代CVN 78 航母上正式使用电磁弹射器,2002年9月开始建造的法国“戴高乐”-2 号航母均安装电磁弹射装置[2]。本文以电磁弹射器为舰载机弹射起飞的关键装置为研究重点。
1.2 拖拽方式
舰载机弹射过程中的拖拽方式经历了从拖索弹射到前轮拖拽弹射的变迁[3]。前轮拖拽弹射与拖索弹射的本质差异是:前者的弹射作用点相对于机身是位于前轮的前面,而后者是位于前轮的后面,如图1 和图2所示[4]。这就导致拖索弹射要求飞机在弹射时机身要尽量处在弹射滑轨中心线上,否则会影响飞机的安全弹射。而前轮拖拽弹射允许机身相对于弹射轨道可以有一个进入角φ0,只要前轮上的弹射钩挂住弹射凹槽,主机轮相对于滑轨有500 mm的偏差,甚至前轮有稍许偏差也不要紧[5-6]。在弹射过程中,飞机会自动进入正确的滑行线,这样就可大大节省飞机进人弹射位置的时间。因此到目前为止,美国的舰载机除教练机外,几乎全部采用前轮拖拽弹射方式。本文研究中也以前轮拖拽为研究前提。
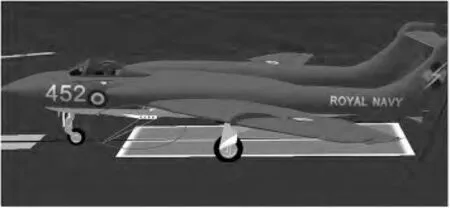
图1 “海雌狐”(SeaVixen)飞机拖索式弹射三维示意图Fig.1 3 dimensional chart of the dragging rope catapult for SeaVixen

图2 A-6E 飞机前轮拖拽弹射三维示意图Fig.2 3 dimensional chart of the dragging front wheel catapult for A-6E aircraft
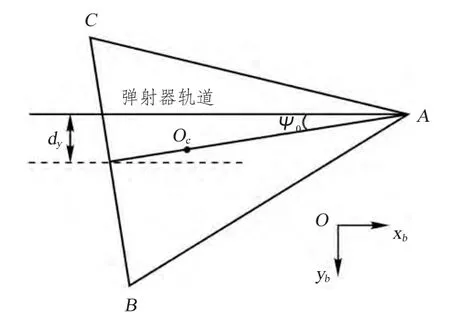
图3 舰载机进入角Fig.3 Divergence angle of the carrier-based aircrafts
2 舰载机弹射中对准约束条件
实现弹射中舰/机惯导的传递对准必须考虑对准时间、舰载机运动、基准信息精度与品质以及各种干扰误差影响等,上述因素决定了传递对准方案的选择及所能达到的对准性能。
2.1 舰载机弹射约束
1)舰载机与舰艇的相对运动
舰载机弹射过程分为弹射准备阶段,沿弹射轨道滑跑阶段,及脱离弹射滑轨在舰艇上滑行阶段。一般自弹射开始至离舰起飞,总耗时一般不超过3 s。舰载机的离舰速度因舰载机自重而异,一般终态速度最高可达到102.8 m/s 左右[4]。
舰载机弹射过程中,由于初始偏心距的作用,弹射过程中存在较大幅度的姿态变化,且初始偏心距越大,姿态变化幅度越大。一般而言,水平姿态角的变化幅度不超过1°,而航向角的变化幅度最大可达到10°左右[6]。

图4 舰载机姿态变化Fig.4 Attitude changing of the carrier-based aircrafts
2)传递对准方法选择
分析上述弹射过程,舰载机的高速运动对舰/机惯导弹射中传递对准的实现利弊共存。
首先,简化舰载机弹射过程,以匀加速度运动计算,舰载机的加速度可达到3g 左右,其瞬时加速度则更大。因此,舰载机弹射过程中高加速运动过程可以提高含有“线运动”参数为测量量的对准方法的可观测性,有利于提高对准精度,缩短对准时间。
其次,舰载机弹射时间极短,不利于滤波器的收敛。工程应用中卡尔曼滤波器的滤波周期一般为1 s,2.5 s 的弹射时间内滤波器很难收敛。因此必须通过提高滤波周期、选择适用匹配方法,或设法延长对准时间的方法解决。
第三,舰、机之间的相对运动,导致很难直接利用主子惯导的姿态信息或角速度信息实现舰/机惯导传递对准,同时舰、机随时间而变的姿态相对变化也将对传递对准性能产生不可忽视的影响。
从上述分析可以看出,匹配方法的选择被限制在“线运动”参数为测量量的对准方法中。一般而言,位置匹配方法的对准速度为三者中最慢,加速度匹配方法最快,因此首先摒弃位置匹配方法。其次,加速度匹配方法对杆臂加速度补偿公式时所需的˙r,¨r,以及˙ω等参数只能通过已有参数微分获得[7],其精度会对补偿效果产生一定影响,同时该方法对外界干扰的敏感度大于速度匹配方法,因此除特殊场合外,加速度匹配方法一般很少采用[8~11]。可见速度匹配方法为实现舰/机惯导弹射中对准的最佳方法。
然而,传递对准开始时刻载体即存在较大加速运动(特别是加速度大于1g)时,反而不利于速度匹配方法的实现。因此本文提出基于弹射准备及滑跑过程的弹射中传递对准方案。即舰载机处于弹射位置时即开始传递对准,直到舰载机离舰起飞时刻结束。
2.2 基准信息约束
1)基准信息来源及精度
由于舰载机与舰艇之间存在相对运动,因此舰载惯导的速度信息不能直接作为基准信息使用,而需要利用外部测量设备获取舰、机相对运动信息,叠加于舰艇速度信息之上,作为舰载机惯导对准的基准信息。
GPS 导航设备可以为舰载机提供精确的位置、速度甚至航向信息,但由于GPS 在战时容易受到干扰,因此不在本文的考虑范围之内。激光多普勒测速仪(laser Doppler velocimeter,LDV)是一种新型传感器,具有精度高、测速范围宽、动态性能好及非接触测量等优点。目前已研制的激光多普勒测速仪一般均能达到1% ~2%V (V 为载体的相对速度矢量合)的精度[12],国防科技大学[13-14]研制的激光多普勒测速仪可达到0.1% ~0.2%V 的精度,同时其测量范围可谓是“无限大”,低至每秒百分之几毫米,高至每秒几个马赫,完全可以实现对舰载机运动速度的精确测量。
但激光多普勒测速仪目前仅能测量舰、机相对速度合矢量,需要将其分解到导航坐标系。虽然由于偏心角的存在,舰载机在沿跑道滑行过程中会存在航向及水平姿态的变化,但其速度合矢量却被约束在了跑道沿线上,因此可利用跑道航向信息对其进行分解。这样激光多普勒测速仪测量精度及跑道航向精度也就成为影响基准信息精度的主要因素。通过理论分析和数学仿真获知,在相对测速精度优于0.2%V(1σ),航向误差小于3′(1σ)时,速度基准信息的精度优于0.1 m/s (1σ),表明基于激光多普勒测速仪及跑道航向获得的速度信息可以满足传递对准对基准信息精度的需求。
2)基准信息品质
基准信息品质也会影响对准性能。基准信息的品质一般包括数据更新率、时间延迟及数据跳变等。
①数据更新率。如上文所述,由于舰载机弹射时间极短,应尽量提高数据更新率。据理论分析及数学仿真结果表明,数据更新率越高,对传递对准性能的提高越好,一般大于100 Hz 的更新率即可满足传递对准的需求。
②时间延迟。时间延迟的形成主要有2 方面因素:一是数据处理造成的时延;二是数据传输造成的时延[14,15-16]。对时延的处理方法有多种,除了通过软硬件设计保证主子惯导之间的时间同步外,还可以采用数据处理的方法对时延引起的误差进行补偿。
③数据跳变。舰载机被拖索牵引开始滑行时,以及脱离弹射器开始在甲板上自由滑行时刻,舰载机所受加速度均会有比较大的变化,由于时间延迟等原因的存在,会使作为观测量的速度误差出现数据跳变。数据跳变在一定程度上会引起滤波器发散,不利于舰/机惯导传递对准的实现。目前郑辛等人提出了应对速度误差跳变的局部基准速度输出平滑处理技术,可以有效减弱数据跳变对传递对准性能的影响[18]。
2.3 误差补偿约束
影响传递对准性能的误差主要包括舰、机惯导之间的挠曲变形、杆臂长度引起的杆臂误差,以及大失准角引起的非线性问题等。对速度匹配而言,一定量的挠曲变形对传递对准性能影响不大,因此本文暂不考虑该误差的影响,着重研究杆臂误差补偿以及大失准角问题。
2.3.1 吸附时间 从图2可见,AB-8大孔树脂与提取液混合,在吸附2 h时吸附率最高为32.9%,时间延长吸附率没有升高。因此,吸附时间以2 h为宜。
1)动态杆臂误差补偿
当舰载机处于弹射位置时,由于舰载惯导与机载惯导存在一定距离,因此利用速度匹配方法进行传度对准时,必须考虑杆臂效应的影响。一般而言,获得主子惯导之间的杆臂长度以及舰艇的角速度,即可对杆臂速度误差进行补偿[19]。但是当舰载机处于滑行阶段时,舰机之间的距离随着舰载机的滑行而变化,且舰载机的滑行距离一般超过50 m,因此必须实时对杆臂误差进行计算或估计。
本文以实时解算的方法计算杆臂速度在导航坐标系上的分量。为简化计算,假设舰艇主惯导位于舰载中心;舰载机处于弹射位置时舰、机惯导之间的相对位置已知;舰艇中轴线与跑道之间的夹角φ 已知;舰载主惯导距舰艇中轴线与跑道交点的距离OmOp已知;舰艇滑行距离由激光多普勒测速仪测量的速度信息经过积分获得。解算每时刻的杆臂速度误差时,首先利用舰载主惯导与交点的距离OmOp、舰载机与交点的距离aOp,以及跑道与舰艇中轴线的夹角φ,解算杆臂的长度r;再利用舰载机与交点的距离aOp,跑道与中轴线的夹角φ,及杆臂长度r,解算杆臂长度在主惯导坐标系上的投影;进而解算杆臂速度误差在导航坐标系上的投影。
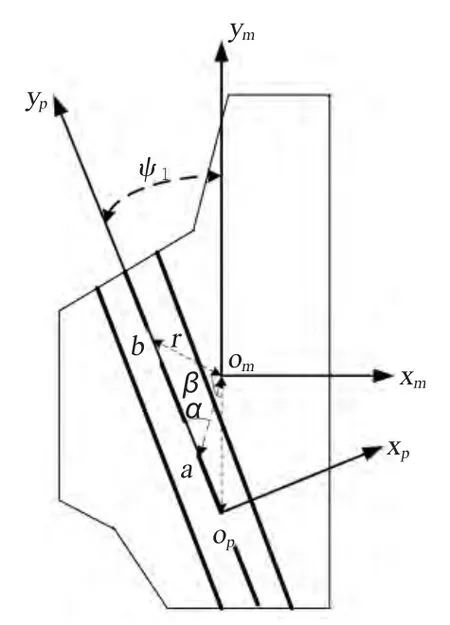
图5 杆臂长度动态变化Fig.5 Dynamic diversification of the lever arm length
2)大失准角误差补偿
在舰载机进入弹射位置时,虽然由于初始偏心距的存在,使得舰载机的航向与跑道航向存在一定偏差,但是二者还基本一致,一般不超过2°,而跑道航向与舰艇的航向会因跑道设置的不同而存在较大的角度差值。因此在分析研究舰/机惯导传递对准问题时,应当考虑大失准角问题。
大失准角问题的存在,使得舰/机惯导传递对准误差模型变为非线性模型,传统的卡尔曼滤波方法不能实现对机载惯导姿态失准角的估计。处理非线性问题,一般采用EKF 方法或UKF 方法。EKF 是由高斯随机线性变量来估计状态分布,然后通过非线性模型的一阶线性化转换为线性模型,再利用线性滤波方法实现传递对准。UKF 方法通过确定性的采样来解决非线性化问题,用最小数量的采样点来近似状态分布,之后这些点通过可靠性的非线性系统进行传播,这样就使得UKF 对任何非线性系统的估计都能达到三阶精度,而EKF 往往只能达到一阶精度[20-23]。
虽然UKF 方法相比较KF 或EKF 而言能达到较高的估计精度,但其计算量也成倍增加。由于舰载机弹射时间短、弹射速度快,对滤波器的滤波周期有比较苛刻的要求,因此UKF 方法的应用受到一定限制。本文提出基于跑道航向的舰/机惯导传递对准方法。即首先根据舰艇航向、跑道与舰艇中轴线的夹角求解出跑道的航向,将此值作为初始航向值赋值给机载惯导,而不是传统的将舰艇惯导的航向信息直接赋值给机载惯导。这样,舰机惯导之间的大失准角问题就转换为舰载机与跑道航向之间的小角度问题,利用传统的卡尔曼滤波方法即可实现舰/机惯导的传递对准。
3 舰载机弹射中对准方案
综合分析上述各种约束条件,舰载机弹射中的舰/机惯导传递对准方法宜采用速度匹配方法,对准过程宜贯穿于舰载机在弹射准备阶段、弹射滑跑阶段以及脱离弹射器的自由滑跑阶段,对准时间不超过8 s,其中弹射准备阶段5 s,弹射过程3 s。
4 结 语
本文对弹射过程中舰载机运动规律对实现舰/机惯导传递对准的利弊进行充分的论证,对影响传递对准性能的各种干扰误差,如时间延迟、杆臂效应及大失准角等因素进行分析,并提出误差补偿方法。在上述分析的基础上,提出舰/机惯导传递对准的方案,为舰载机的快速起飞提供了一定保障。
1)利用速度匹配方法可以实现舰/机惯导快速传递对准,对准过程宜贯穿于弹射准备阶段、弹射滑跑阶段以及脱离弹射器的自由滑跑阶段,对准时间不超过8 s;
2)数据更新率、基准信息延迟、杆臂误差以及大失准角误差会影响传递对准性能,如果不对其进行补偿,甚至会导致传递对准失败;
3)基准信息延迟可以采用将延迟时间作为状态量进行估计的方法进行补偿,且在相同时延情况下,数据更新率越高,对传递对准的影响越小;动态杆臂误差可以基于舰机运动相对关系进行实时计算而补偿;大失准角误差可以利用跑道航向信息转换为小失准角问题进行处理。
[1]徐阳.航母编队的防御能力[J].兵器知识,2010(10A):58-59.
XU Yang.Defence ability of the carrier aircraft formation[J].Ordnance Knowledge,2010(10A):58-59.
[2]李梅武,崔英,薛飞.航母飞机起飞的最佳选择——电磁弹射系统[J].舰船科学技术,2008,30(2):34-37.
LI Mei-wu,CUI Ying,XUE Fei.Electromagnetic ejection system-the best choice for carrier aircraft taking-off[J].Ship Science and Technology,2008,30(2):34-37.
[3]海猎隼.国产舰载机采用前轮拖拽弹射可行性探讨[J].舰载武器,2007(4):73-77.
HAI Lie-sun.The engineering feasibility of nose-tow catapulting for carrier-based aircraft[J].Shipborne Weapons,2007(4):73-77.
[4]朱熠.舰载机起飞控制与仿真技术研究[D].南京:南京航空航天大学,2012.
ZHU Yi.Research on control and simulation of launch technology for carrier-based aircraft[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012.
[5]马世强.弃重就轻——美国航母弹射技术变迁[J].环球军事,2006,117:53-54.
MA Shui-qiang.Abandoned heavy on the light-the U.S.aircraft carrier catapult technological change[J].Global Military,2006,117:53-54.
[6]于浩,聂宏.舰载机偏中心定位弹射起飞动力学分析[J].南京航空航天大学学报,2010,42(5):537-542.
YU Hao,NIE Hong.Dynamics analysis of carrier-based aircraft with off-center catapult launch[J].Journal of Nanjing University of Aeronautics and Astronautics,2010,42(5):537-542.
[7]孙昌跃.捷联惯导系统传递对准研究[D].哈尔滨:哈尔滨工业大学,2009.
SUN Chang-yue.Transfer alignment for strapdown inertial navigation system[D].Harbin:Harbin Institute of Technology,2009.
[8]VEPA N M.A dynamic alignment system for applications on flexible plotforms such as ship[J].Gyro Technology,1989:16.10-16.13.
[9]SCHNEIDER A M.Kalman filter formulatons for transfer alignment of strapdown inertial units[J].Navigation,1983,30(1):72-89.
[10]TITTERTON D H,WESTON J L.Dynamic shipboard alignment techniques[C].Proceedings of DGON Symposium on Gyro technology.Germany,1987(9).0-9,27.
[11]TITTERTON D H,WESTON J L.RAE F.The alignment of ship launched missile IN systems[C].IEE Colloquium on Inertial Navigation Senser Development.London,UK,1990:1/1-116.
[12]刘飞.激光多普勒测速仪的研究[D].长春:长春理工大学,2006.
LIU Fei.Reserch on laser doppler velocimeter[D].Changchun,Changchun University of Science and Technology,2006.
[13]魏国,王宇,周健,等.基于激光多普勒测速仪的车载组合导航[J].强激光与粒子束,2011,23(1):49-53.
WEI Guo,WANG Yu,ZHOU Jian,et al.Vehicle integrated navigation based on laser Doppler velocimeter[J].High Power Laser and Part Icle Beams,2011,23(1):49-53.
[14]周健,龙兴武.载体振动对差动激光多普勒测速仪的影响[J].强激光与粒子束,2011,23(2):325-328.
ZHOU Jian,LONG Xing-wu.Influence of vehicle′ s vibration on dual-beam laser doppler velocimeter[J].High Power Laser and Part Icle Beams,2011,23(2):325-328.
[15]解春明,赵剡,杨传春.信息时标不一致对传递对准的影响及修正[J].中国惯性技术学报,2010,18(4):412-420.
XIE Chun-ming,ZHAO Yan,YANG Chuan-chun.Influence and compensation of time-mark discrepancy in transfer alignment[J].Journal of Mechanical Science and Technology,2010,18(4):412-420.
[16]JOON L,YOU-CHOL L.Transfer alignment considering measurement time delay and ship body flexure[J].Journal of Mechanical Science and Technology,2009,23(1):195-203.
[17]郑辛,付梦印,周章华.一种应对主基准速度误差跳变的局部基准速度输出平滑处理方法[J].惯性技术学报,2012,20(1):24-28.
ZHENG Xin,FU Meng-yin,ZHOU Zhang-hua.Smoothing processing method of local reference output speed in response to master reference speed error jump[J].Journal of Chinese Inertial Technology,2012,20(1):24-28.
[18]罗彬.舰载武器惯导系统传递对准仿真验证系统的研究与设计[D].哈尔滨:哈尔滨工程大学,2012.
LUO Bin.The research and design of transfer alignment simulation and verification system on ship carried weapon inertial navigation system[D].Harbin:Harbin Engineering University,2012.
[19]魏学通,高磊.大方位失准角下舰载机传递对准技术[J].中国惯性技术学报,2012,20(5):553-556.
WEI Xue-tong,GAO Lei.Transfer alignment of carrier-born aircraft under large azimuth misalignment angle[J].Journal of Chinese Inertial Technology,2012,20(5):553-556.
[20]周菊华,程向红.简化UKF 在SINS 摇摆基座上的初始对准[J].弹箭与制导学报,2009,26(3):65-68.
ZHOU Ju-hua,CHENG Xiang-hong.The application of simplified UKF to initial alignment of SINS on swaying base[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,26(3):65-68.
[21]XU Xin-yu,LI Bao-xin.Rao-blackwellised particle filter with adaptive system noise and its evaluation for tracking in surveillance[M].Proceedings of SPIE the International Society for Optical Engineering,2006.
[22]严恭敏,严卫生,徐德民.简化UKF 滤波在SINS 大失准角初始对准中的应用[J].中国惯性技术学报,2008,16(3):253-264.
YAN Gong-min,YAN Wei-sheng,XU De-min.Application of simplified UKF in SINS initial alignment for large misalignment angles[J].Journal of Chinese Inertial Technology,2008,16(3):253-264.
[23]KAIN J E,CLOUTIER J R.Rapid transfer alignment for tactical weapon applications[C].Proceedings of AIAA Guidance,Navigation and Control Conference,1989:1290-1300.
[24]JONES D,ROBERTS C,TARRANT D,et al.Transfer alignment design and evaluation environment[C].IEEE Proceedings of Aerospace Control Systems,1993:753-757.