U型连杆在舰船用空压机上的应用研究
2014-11-27高顺凯张宝成高元明夏世铜
高顺凯,张宝成,高元明,夏世铜
(1.华中科技大学船舶与海洋工程学院,湖北 武汉;430060;2.沈阳鼓风机集团股份有限公司,辽宁 沈阳 110869)
1 引言
高压空压机是海军舰船最重要的配套设备之一,但因其采用V型往复运动机构,运行时振动、噪声较大,不仅影响其它舰船设备的正常工作,严重时还会影响到舰船的战术安全,因此各海军强国均投入较多人力物力研制低振动、低噪声空压机。国内的舰船用空压机经过多年的不断改进,其振动、噪声水平已大幅降低,但仍无法满足总体要求,急需进一步研究减振降噪办法。在V型空压机的各种不平衡惯性力矩中,因由连杆不在同一平面内所产生的不平衡惯性力矩所占比重较小,所以常规计算时忽略不计,但此惯性力矩对舰船用空压机的振动、噪声仍有很大影响。本文对V型空压机连杆惯性力矩进行深入的理论分析,并通过使用有限元分析研究应用U型连杆结构,降低不平衡惯性力矩的可行性,探索舰船用空压机减振降噪的新方法。
2 模型的建立与分析
2.1 惯性力的分析与计算
一般V型空压机的运动机构简化后的轴向示意图如图1所示。
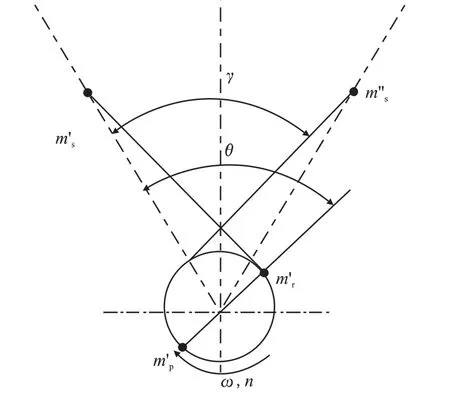
图1
计算I阶往复惯性力:
(1) 左侧列

式中F′I——左侧列的I阶往复惯性力
m′s——左侧列往复运动质量
r——曲柄半径
ω——曲轴旋转的角速度
θ——曲柄转角
(2) 右侧列

式中F"I——右侧列的I阶往复惯性力
m"s——右侧列往复运动质量
计算II阶往复惯性力:
(1) 左侧列

式中F′II——左侧列的I阶往复惯性力
λ——曲柄半径连杆比
(2) 右侧列

式中F"II——右侧列的I阶往复惯性力
2.2 惯性力矩的分析与计算
一般V型空压机的运动机构简化后的径向示意图如图2所示。
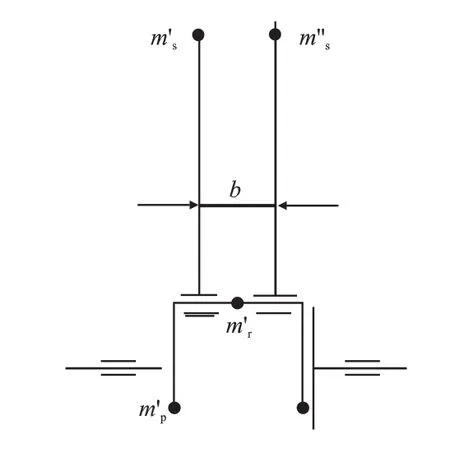
图2
计算I阶往复惯性力矩

式中MI——I阶往复惯性力矩
b——列间距
计算II阶往复惯性力矩

式中MII——II阶往复惯性力矩
由于气缸夹角γ的存在,一阶惯性力F′I与F"I在曲轴各转角位置上均不相等,二阶惯性力F′II与F"II也不相等,因此I阶往复惯性力矩MI与II阶往复惯性力矩MII必然存在。通过纯数学理论分析计算往复惯性力矩时需要对曲轴、活塞、连杆等部件简化,由此产生误差将影响惯性力矩的计算精度,故本文通过有限元分析方法计算采用U型连杆后的不平衡惯性力及力矩减小幅度。
2.3 有限元分析与计算
为了保证有限元分析更有指导意义,有限元三维模型是在某现役舰船用空压机机型为基础建立的。
原机组运动机构的三维模型结构见图(3),U型连杆的三维模型结构见图(4)。
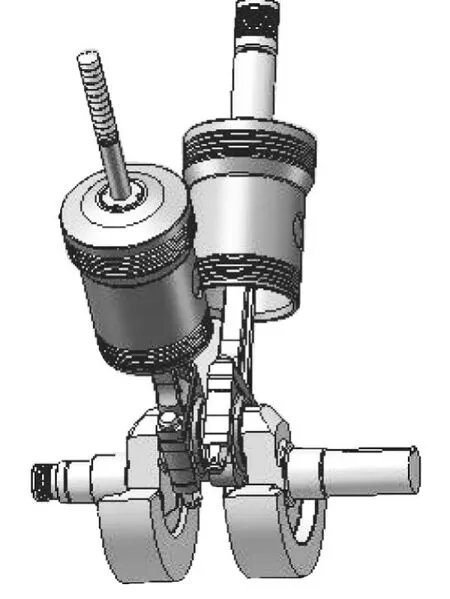
图3 原机组运动机构
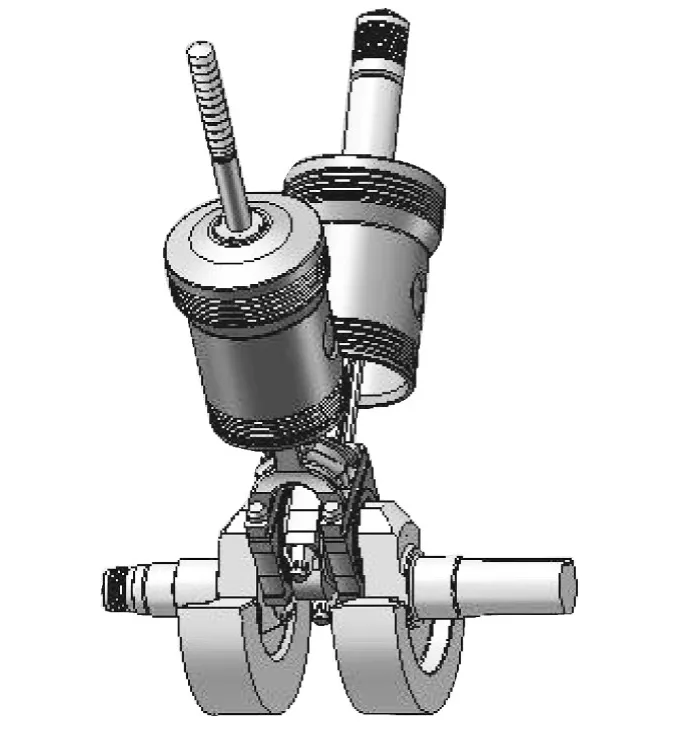
图4 U型连杆运动机构
针对以上三维模型采取的计算步骤如下:
(1) 将原机组运动机构的物理特征及运动参数输入到三维模型进行计算分析,计算原机组的不平衡惯性力及力矩。
(2)假设U型连杆运动机构的物理特征及运动参数与原机组运动机构完全相同并进行计算分析,计算理论上的U型连杆机构的不平衡惯性力及力矩。
(3)将U型连杆运动机构的实际物理特征及运动参数输入到三维模型进行计算分析,计算实际U型连杆机构的不平衡惯性力及力矩。
计算结果如表1所示。

表1
图5、图6、图7为不平衡惯性力及力矩在一个周期内的变化曲线。
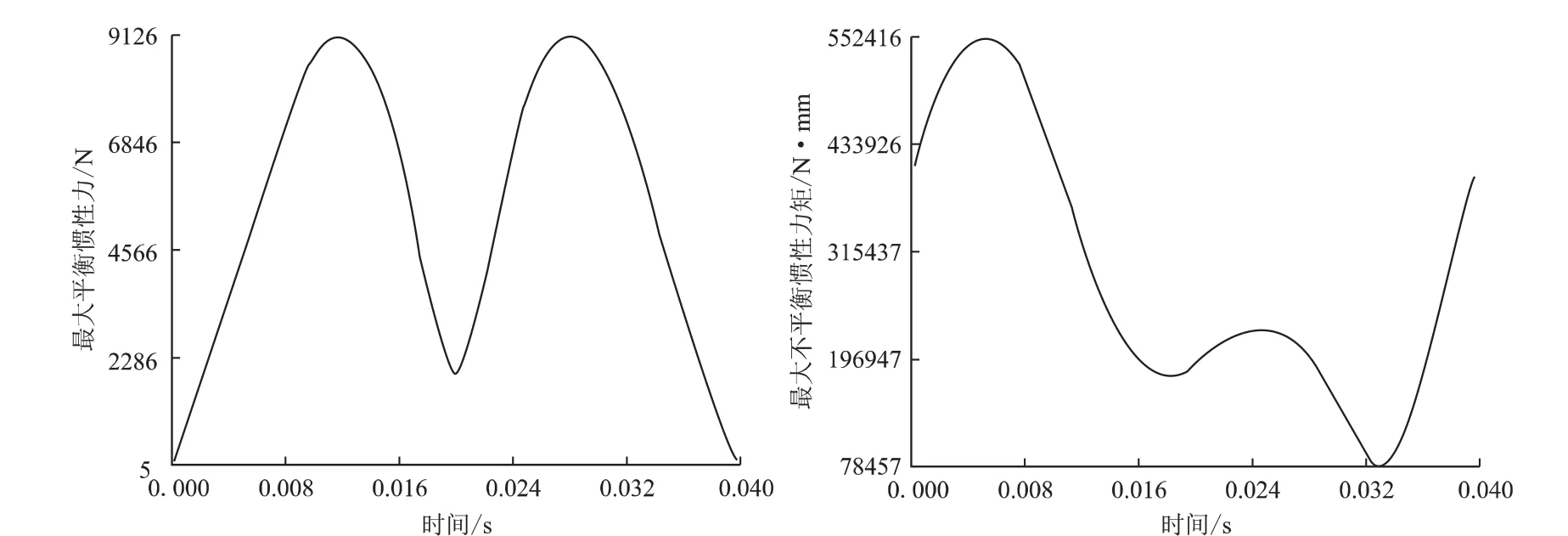
图5 原机组运动机构的计算结果
图6 理论上的U型连杆运动机构的计算结果(与原连杆质量相等)
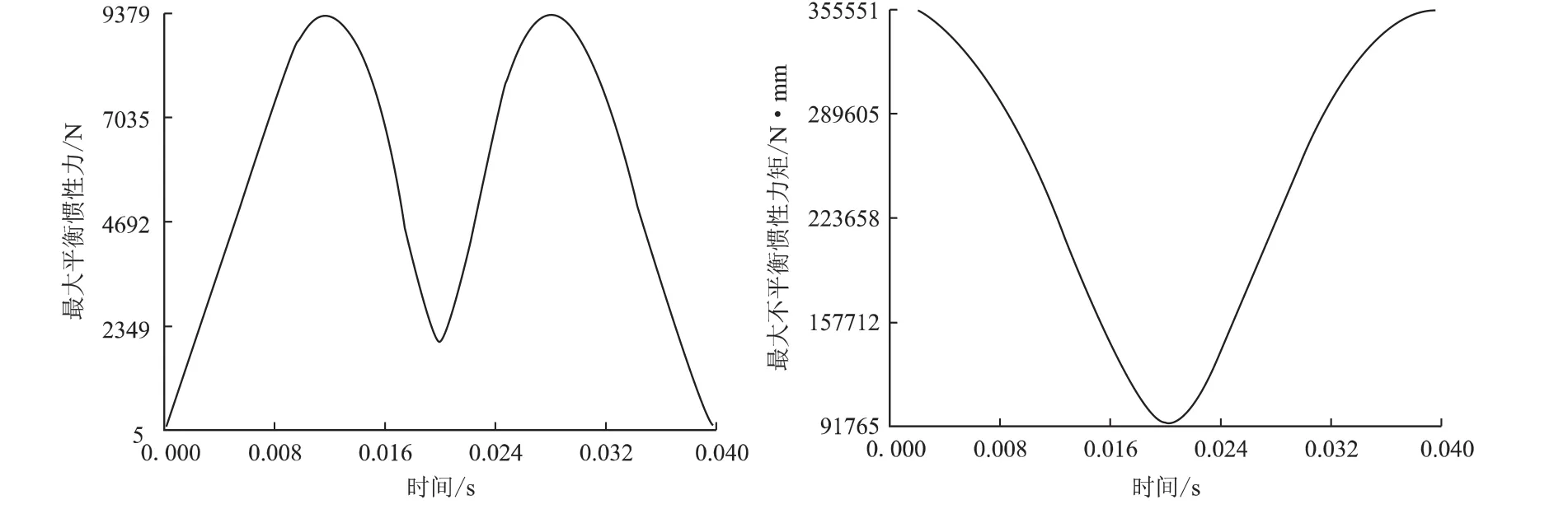
图7 实际U型连杆运动机构的计算结果(实际质量)
3 结论
通过以上分析可知:当U型连杆材质与原连杆一致时,由于U型连杆的结构比原连杆复杂,重量增加约25%,因此新机组的最大不平衡惯性力增加了253N,增幅2.77%,不平衡惯性力矩减小196865 N·mm,降幅35.6%。当U型连杆采用新材料,并使其与原连杆具有相同质量时,则该机组的不平衡惯性力与原机组一致,而不平衡惯性力矩减小205669 N·mm,降幅37.2%。
综上所述,在应用新材料降低U型连杆的质量后,U型连杆结构可有效降低V型空压机的不平衡惯性力矩,从而实现舰船用空压机减振降噪的目的。
[1] 陈永江.容积式压缩机原理及结构设计[M].西安:西安交通大学动力工程系压缩机教研室,1985,7.
[2] 郁永章.容积式压缩机技术手册[M].北京:机械工业出版社,2000,10.
[3] 吴宗泽.容积式压缩机技术手册[M].北京:机械工业出版社,2004,1.
[4] 青岛森博科技开发有限公司.SolidWorks2008基础教和与实例解析[M].机械工业出版社,2008,07.
[5] 詹有刚.Solid Works快速入门教程(2010中文版)[M].机械工业出版社,2010,10.
[6] 马连生,杨静宁,宋曦.理论力学[M].科学出版社,2009.
