小型涡扇发动机分布式控制系统总线触发机制研究
2014-11-19田飞龙郭迎清谢振伟
田飞龙,郭迎清,谢振伟
(西北工业大学动力与能源学院,西安710072)
0 引言
当前的航空发动机控制系统普遍采用全权限数字电子控制器(FADEC),这是1种“点对点”的集中式控制系统。传统的控制系统面临着越来越突出的减重、提高发动机性能、降低成本等问题,采用总线通信的分布式结构将会是下一代控制系统的发展趋势,美国已专门成立DECWG(发动机分布式控制工作组)联合各行业推进这项技术的研究[1-2]。
分布式控制不同于传统的控制系统,采用总线通信必然会引入一些新的问题,如多节点数据竞争产生的网络诱导延迟、掉包等问题。不同的总线触发机制下的延时情况不同,对系统的实时性、可靠性等造成的影响也不同。现有的总线触发机制有2种:事件触发机制和时间触发机制。文献[3]通过比较几种不同的总线,认为时间触发机制适用于对安全性要求较高的场合。在航空发动机分布式控制尚未成熟的工程应用背景下,应该选择何种总线触发机制值得研究。
本文以某小型涡扇航空发动机为对象,利用TrueTime工具箱建立发动机分布式控制系统,分析比较不同总线触发机制对发动机实时控制的影响,从而选择适合发动机分布式控制的总线触发机制。
1 2种总线触发机制
发动机分布式控制采用总线通信,标准化接口提高了系统兼容性和开放性,便于实现智能模块标准化设计;利用总线代替众多模拟连接的线束可以大大减轻控制系统的质量,提高发动机性能[4-5]。
引入总线使得控制系统各节点共享总线会产生竞争冲突问题。目前解决该问题有2种方法:事件触发机制和时间触发机制[6]。基于事件触发方式的网络中,所有活动都是由事件的发生引起,但由于延迟等原因,事件的产生是随机的,这就很可能导致网络中的事件之间发生冲突。此外,事件触发还具有额外开销小和实现简单的优点。基于时间触发方式的网络中,所有节点根据时间同步化,每个在网络上的事件活动都打上了时间标记。系统中的任务根据已制定的时间表分配好相应的总线时间。因此,在采用时间触发方式通讯的总线网络中,节点都按照事前制定的调度时间表执行。2种触发方式都在实际中得到了应用。
2 利用TrueTime搭建某小型涡扇发动机数字仿真平台
TrueTime是瑞典LUND工学院(DanHenriks-son和AntonCervin)研制的基于Matlab的网络控制仿真工具箱,支持控制与网络实时调度的同时仿真[7]。其计算机模块可以模拟分布式控制系统中的各智能单元和控制器(EEC),每个模块都具有A/D转换、总线数据收发等功能,通过M文件编程实现其功能;网络通信模块可以模拟分布式控制系统中总线通信。由于CAN总线具有优越的数据传输性能,能保证其可靠性,因此在高温电子技术不成熟时,总线通信模块可先采用CAN总线通信,文献[8-9]为国内外研究中,将CAN总线用于发动机分布式控制预先研究的实例。
本系统的被控对象为利用系统辨识方法得到的某小型涡扇发动机的线性模型[10]。目前,国外研究认为发动机分布式控制系统结构有智能节点型、部分分布式以及完全分布式几种形式,而智能节点型结构在分布式系统结构发展中起基础过渡作用[11-12],本文基于此结构搭建了针对某小型涡扇发动机的分布式控制系统。
控制系统有3个智能节点:智能转速传感器、智能执行机构、控制器节点。控制器节点采用数字式PID设计,利用燃油流量控制转子转速。此外,系统还添加1个网络干扰节点,用来模拟高优先级任务占用网络带宽(即不同网络负载)情况下,不同触发机制对系统的不同影响。分布式控制系统的原理如图1所示;利用TrueTime搭建分布式控制系统如图2所示。
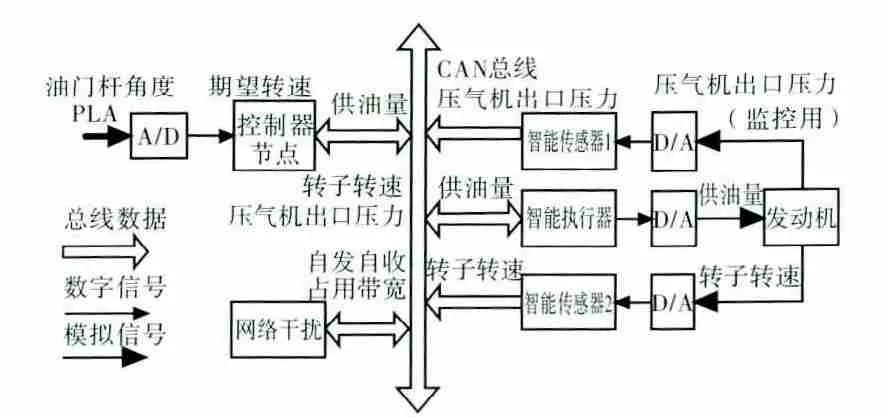
图1 分布式控制系统的原理
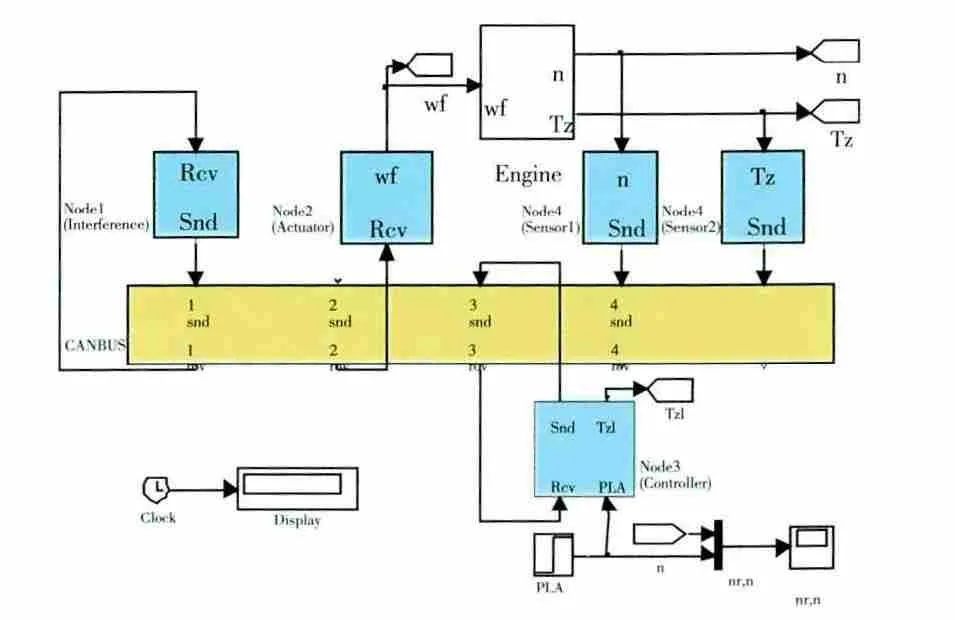
图2 利用TrueTime搭建分布式控制系统
3 事件和时间触发机制仿真
3.1 2种触发机制的实现
分布式控制中各智能节点与控制器之间的数据通信和任务执行通过中断来触发,有2种触发方式:时间触发和事件触发。
通过在TrueTime计算模块中设置中断句柄实现事件触发,其CAN总线接口接收上一节点任务信号后中断,开始执行动作和收发数据,因此对网络接口信号到达时机的依赖性很大。CAN总线在本质上是事件触发总线,在仿真时,将各计算模块的动作设为周期性重复,以实现时间触发,其内部的周期性时间决定节点的数据收发和动作执行,数据到达后存储在邮箱中,不再作为中断信号。1个计算模块中事件和时间触发机制的原理如图3、4所示。
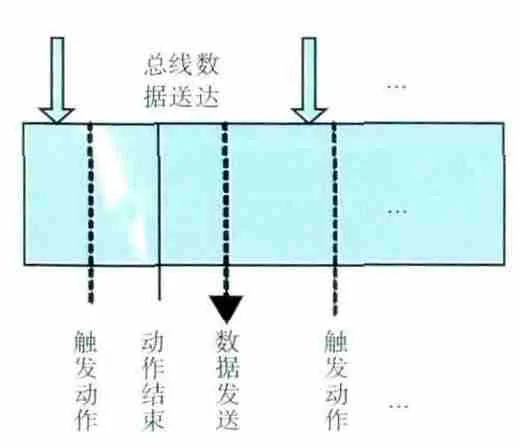
图3 1个计算模块中的事件触发机制
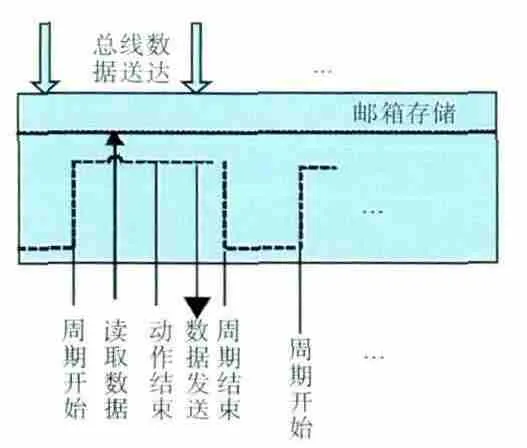
图4 1个计算模块中的时间触发机制
3.2 仿真结果对比
采用相同的控制算法(PID参数相同),采样周期均设为10ms时,2种触发机制下转子转速响应曲线如图5所示。在时间触发机制中,曲线超调量为4.74%,而事件触发机制中响应曲线超调量为7.06%,较前者高2.32%。
存在干扰节点竞争总线资源的情况下,一段时间内2种触发机制中控制器节点的任务调度情况如图6所示,从图中可见,总线延迟使事件触发机制中控制器任务的触发时刻不可预测,而时间触发为确定的周期性任务。
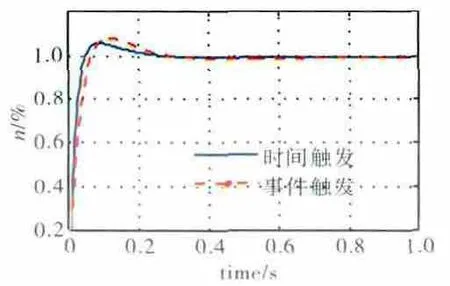
图5 2种触发机制下转子转速响应
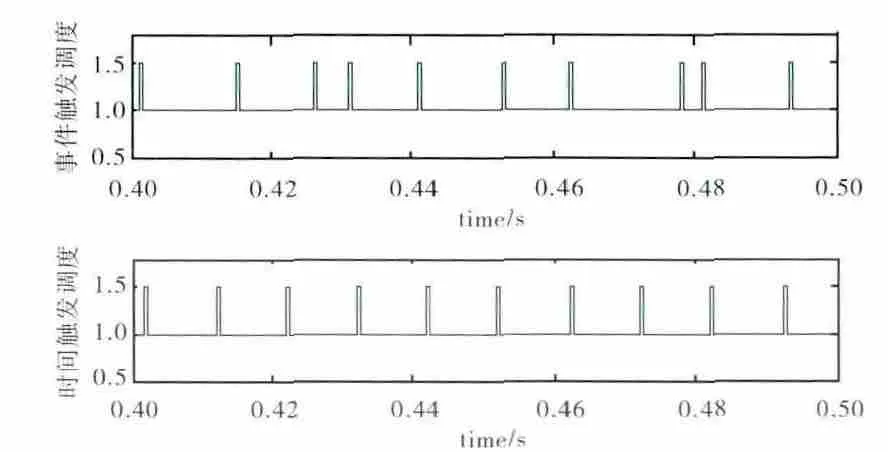
图6 2种触发机制下控制器节点任务调度情况
3.3 2种触发机制下时延统计结果
以控制器节点发送给智能执行机构节点的消息帧CTRL(优先级为2)为统计对象,改变网络负载(10%,20%,30%),分析研究不同触发机制对总线的延迟时间的影响。
(1)在事件触发机制下,2s内发送200次消息,除去计算模块中的固定计算延迟,CTRL各帧消息的延迟时间统计如图7所示,延迟的统计结果见表1。
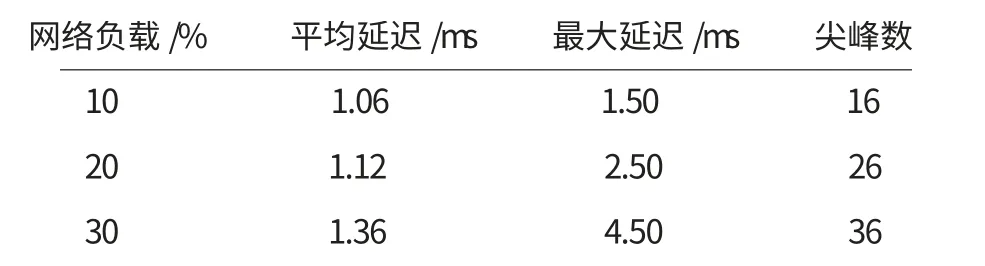
表1 事件触发总线的延时统计结果
从表1中可见,在事件触发机制下,CTRL消息的延时尖峰数量随网络负载增大而递增,说明CTRL消息帧与其他消息帧发生碰撞的次数增加,平均延迟时间加长。分析延时大小后得出其分布具有很大的随机性。
(2) 在时间触发机制下的不同网络负载下,CTRL各帧消息的延迟时间统计如图8所示,延时统计结果见表2。

图7 CTRL在30%网络负载下的延迟时间
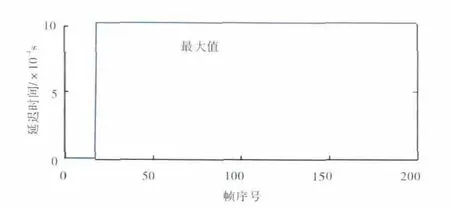
图8 CTRL在30%网络负载下的延迟时间
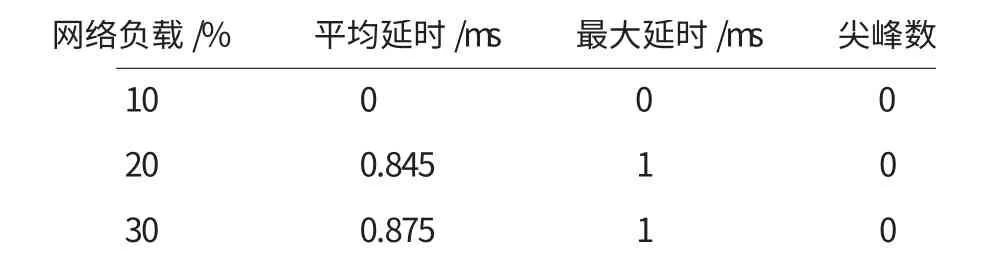
表2 时间触发总线的延时统计结果
从表2中可见,在不同的网络负载下,消息帧的延迟时间比较稳定。这种特点使得分布式系统具有很大的确定性,有利于预测系统消息的延时和系统的控制,适用于对安全性要求较高的场合。
4 结论
本文利用TrueTime/MATLAB工具箱搭建某小型涡扇航空发动机分布式控制系统,研究比较了分布式控制中时间触发和事件触发2种不同的总线触发机制对发动机分布式控制的影响。比较得出:在事件触发机制下,系统各节点的依赖性较强,消息易发生冲撞,且延时具有随机性,会导致很大的不确定性;而时间触发机制解除了系统间相互依存关系,系统延时较为稳定,提高了系统的安全性和预测性。因此,在航空发动机分布式控制中适宜采用时间触发机制,以保证在总线出现延迟或发生故障的情况下,控制器及各智能单元依然能够有效参与。
[1]Behbahani A,Tulpule B.Perspective for distributed intelligent engine controls of the future[R].AIAA-2010-6631.
[2]Culley D,Thomas R,Saus J.Concepts for distributed engine control[R].AIAA-2007-5709.
[3]Rama Y,Mike W,Alireza B.The role of various real-time communication data bus for open system distributed engine control architectures for the future[R].AIAA-2011-6145.
[4]郭迎清,章泓.航空发动机分布式控制系统综述[J].航空发动机,2003,29(3):52-55.GUO Yingqing,ZHANG Hong.Survey of the distributed control system for an aeroengine[J].Aeroengine,2003,29(3):52-55.(in Chi-nese)
[5]张绍基.航空发动机燃油与控制系统的研究与展望[J].航空发动机,2003,29(3):1-5,10.ZHANG Shaoji.Recent research and development of the fuel and control systems in an aeroengine[J].Aeroengine,2003,29(3):1-5,10.(in Chinese)
[6]吕富勇,李永新,卜雄洙,等.基于时间触发的精简串行总线技术[J].南京航空航天大学学报,2011,43(4):544-550.LYU Fuyong,LI Yongxin,PU Xiongzhu,et al.Simplified serial bus based on time triggered architecture[J].Journal of Nanjing University of Aeronautics & Astronautics,2011,43(4):544-550.(in Chinese)
[7]Ohlin M,Henriksson D,Cervin A.TrueTime 1.5-reference manual[EB/OL].[2008-2-24].http://www.control.lth.se/truetime/.
[8]Thompson H A,Benitez-Perez H,Lee D,et al.A CAN bus based safety critical distributed aeroengine control systems architecture demonstrator[J].Microprocessors and Microsystems,1999,23(6):345-355.
[9]李光耀,郭迎清,王海泉.基于CAN总线的航空发动机分布式控制系统通信研究[J].测控技术,2009,28(1):62-66,69.LI Guangyao,GUO Yingqing,WANG Hai-quan.Communication research on can based distributed aeroengine control system[J].Measurement& Control Technology,2009,28(1):62-66,69.(in Chinese)
[10]郭迎清,王海泉.涡扇发动机模型辨识及其控制器设计[J].现代制造工程,2006(9):73-74,81.GUO Yingqing,WANG Haiquan.System identification of a turbofan engine and design of its controller[J].Modern Manufacturing Engineering,2006(9):73-74,81.(in Chinese)
[11]Culley D.Transition in gas turbine control system architecture module distributed and embedded [R].ASME 2010-GT-23226.
[12]DeCastro A J,Palmer A C,Behbahani A.Meeting the requirements of distributed engine control via decentralized,modular smart sensing[R].AIAA-2010-6748.
[13]李光耀,郭迎清,祁新杰.航空发动机分布式控制系统原理样机研制 [J].计算机测量与控制,2009,17(5):865-868.LI Guangyao,GUO Yingqing,QI Xinjie.Communication research on CAN based distributed aeroengine control system[J].Computer Measurement& Control,2009,17(5):865-868.(in Chinese)
[14]陈亮,郭迎清.分布式控制系统中CAN总线通讯性能改进方法[J].科学技术与工程,2011,11(30):7573-7576.CHEN Liang,GUO Yingqing.The method of improving communication performance of distributed control system based on CAN bus[J].Science Technology and Engineering,2011,11(30):7573-7576.(in Chinese)
[15]杜宪,郭迎清.民用涡扇发动机预测控制器设计[J].航空发动机,2013,39(3):27-30.DU Xian,GUO Yingqing.Design of model predictive controller for commercial turbofan engine[J].Aeroengine,2013,39(3):27-30.(in Chinese)