基于凸透镜原理的新型雷达
2014-11-09徐建城李义新
李 丛, 徐建城, 李义新
(1西北工业大学电子信息学院 西安 710029 2上海电机学院电气学院 上海 200240)
前 言
现有的雷达主要有激光雷达和相控阵雷达,军事应用比较广泛,它们分别基于激光技术和电子扫描技术。但是这两种雷达造价高,不适于普遍推广。本文介绍一种基于凸透镜原理的新型雷达,利用凸透镜成像原理,通过接收光信号,对目标物体进行定位,通过对目标物体的连续定位,实时监测物体的一系列性能,其测量精度取决于光敏传感器的灵敏度,需要最低的光亮限制,即要使光敏传感器能够感受到光信号。这种雷达制造简单,材料便宜,适宜于民用和普遍推广。
1 基于凸透镜原理的新型雷达工作原理
1.1 成像原理
利用凸透镜成像原理,根据凸透镜成像规律进行物距和角度的确定,并根据目标物体的移动,确定目标物体的速度和方向。通过旋转凸透镜,理论上可以无限远定位目标物体,根据目标物体的大小、速度、位置、方向来确定物体的性质和性能等。根据凸透镜成像规律,有公式(1)[1]。

式(1)中,u为物距,v为像距,f为透镜焦距。
由式(1)变形后可以得到:

或

或

凸透镜成像原理如图1所示。当物距小于一倍焦距时,成像为正立、放大的虚像,且与物体在凸透镜的同一侧;当物距大于一倍焦距小于二倍焦距时,成像为倒立、放大的实像,且像与物体分处凸透镜的两侧,成像在凸透镜的二倍焦距之外;当物距大于二倍焦距时,成像为倒立、缩小的实像,且像与物体分处凸透镜的两侧,成像在凸透镜的一倍焦距至二倍焦距之间[2]。
1.2 感光板结构
如图2所示,设计感光板为圆形网状晶格结构,每个晶格均为一光敏传感器单元,所成的像映在成像板上,光敏传感器感受到目标物体的光学信息后,通过数据传输将信息传输到数据处理单元,数据处理单元对信息进行处理,进而判断出目标物体的一系列参数。

图1 凸透镜成像原理

图2 感光板结构
1.3 三维坐标系
三维坐标系模式及成像原理如图3所示。以凸透镜主光轴为Z轴,通过光心垂直于主光轴的平面为XOY平面,在第一卦限内的目标物体A(距XOY平面的距离大于二倍焦距)所成的像A'在第七卦限,且距XOY平面的距离在一倍焦距和二倍焦距之间。根据凸透镜成像规律,成倒立、缩小的实像,且目标物体与像位于凸透镜的两侧。若A距XOY平面的距离位于一倍焦距和二倍焦距之间,则所成的像A'在二倍焦距之外,成倒立、放大的实像,且与A分别位于凸透镜的两侧。当雷达转动时,通过对目标物体三维位置的坐标变换,可以确定目标物体的一系列参数。
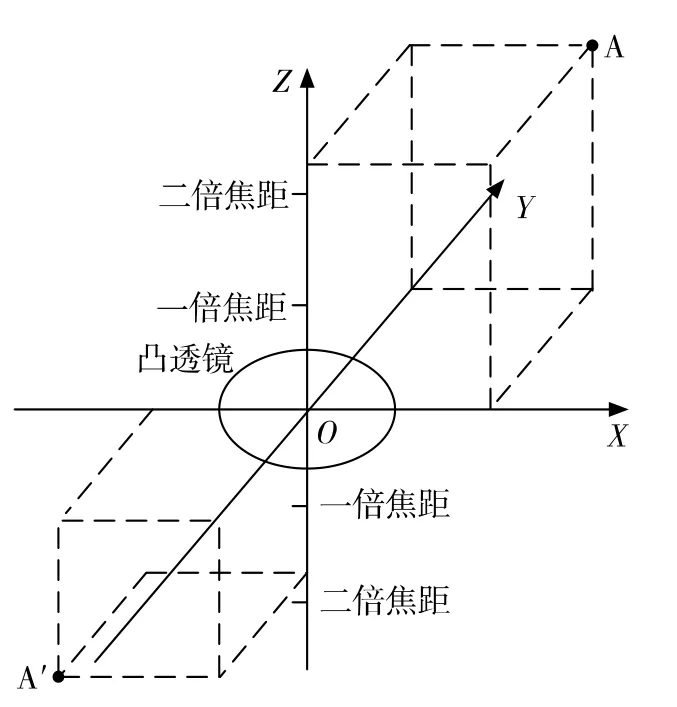
图3 三维坐标系模式及成像原理
1.4 光敏信息传输
光敏信息传输过程如图4所示。感光板由成千上万个光敏传感器组成,每个传感器都经由数据线与数据总线连接在一起,将捕捉到的光敏信号实时传输到数据处理中心,数据处理中心对光敏信息进行处理,确定目标物体的信息。
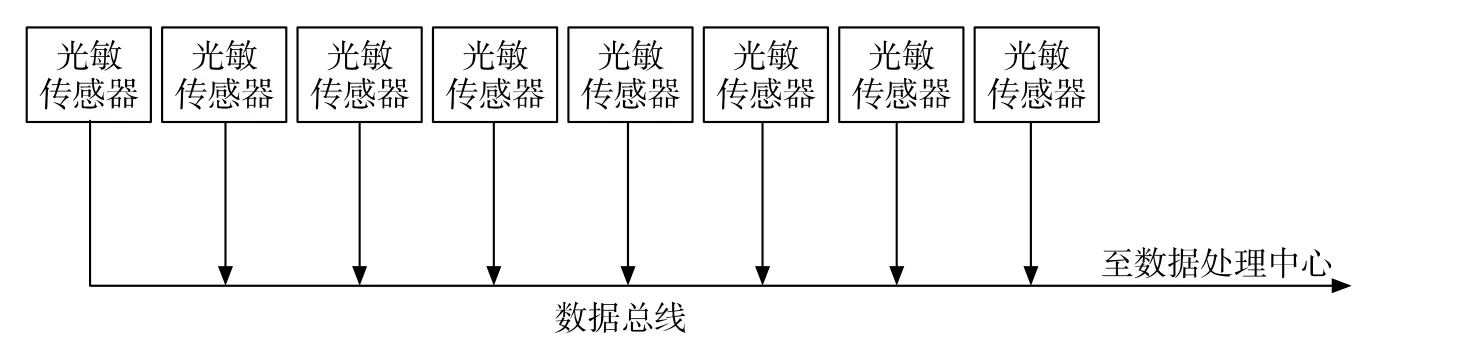
图4 光敏信息传输过程
2 实施方式
根据凸透镜成像原理,在凸透镜一侧距凸透镜光心O所在平面XOY一倍焦距以外的所有物体均能在成像板上成倒立的实像,而位于距凸透镜光心一倍焦距以内的所有物体均成倒立、放大的虚像,不能成实像,且所成像与目标物体位于凸透镜同一侧[3]。
当目标物体出现时,其发出的光或者反射的光经过传播,到达凸透镜,一般情况下物距均大于凸透镜的焦距,且绝大多数情况下物距在二倍焦距以上,因此都能在感光板上成倒立、缩小、清晰的实像。以图3为例,凸透镜主光轴为Z轴,以XOY平面为光心O所在平面,光心点O位置固定。可以看出,图中第一卦限物体A距XOY平面的距离大于二倍焦距,在AOZ平面内,根据凸透镜成像原理,判断出A点成的像A',A'即是A在空间坐标系中所成的像,A、A'、OZ轴在同一平面内(A、A'位于OZ轴上时共线),且A、A'和O点在空间同一直线上。
如图2所示,设计感光板由许多光敏元件组成(即光敏元件阵),感光板只能沿着主光轴来回移动。
在感光板上所成的像A'的信息通过光敏元件感触,通过数据传输送到信息处理中心,信息处理中心根据感光元件在感光板的位置,以及感光板相对于光心O的位置,来判断目标物体的空间位置。对目标物体进行实时监测,可以得到目标物体的速度、方向等一系列信息,进而判断目标的危险程度等。
目标物体A在空间的某一位置一经确定,其在感光板上成的像也就唯一确定,即目标物体与像是一一对应的关系,因此可以通过像相对于凸透镜的位置来判断目标物体的位置。
若像A'距光心O所在平面XOY的距离为a',则其所对应的目标物体A距平面XOY的距离a与a'成比例。而像A'距XOZ、YOZ平面的距离可由感光板上光敏元件所处的位置确定,同理可得出b'、c'和b、c(b'、c'为像A'距XOZ、YOZ平面的距离;b、c为目标物体A距XOZ、YOZ平面的距离,分别与b'、c'成比例)。则可得出目标物体距光心的距离(也可由,按照a'与a的比例关系得出和目标物体位置。通过连续时刻的物体所在位置的确定,可得出目标物体的速度、运动方向等信息,进而判断目标的性质和性能。基于凸透镜原理的新型雷达的工作过程如图5所示。

图5 基于凸透镜原理的新型雷达的工作过程
目前,这一理论还存在一些先天的制约因素,如太阳的影响。当太阳光聚焦到某一点或小面时,会在上面产生很高的温度,有时可达1000℃以上[4]。一般物距相对于凸透镜的焦距来说都是无穷大,当物体离凸透镜较远时,成像基本上在一倍焦距处,这时太阳的像也会成在凸透镜后面的感光板上[5],且基本位于一倍焦距处,而凸透镜对太阳汇聚后的像具有很高的热能,成像处温度很高[6],会损坏成像板,因此考虑到太阳的影响,须提高光敏传感器的耐热性[7]。若要提高该装置的精确度,则可采取增大凸透镜的焦距、增大光敏传感器的密度等措施。
3 结束语
当今世界,新技术层出不穷,尤其是军事领域。雷达号称军队的眼睛,谁看得更远,看得更准,谁就能掌握战场先机,立于不败之地。在民用和科研领域,气象台要密切注意云层的状况,天文台需要对宇宙空间进行观察。为此,本文设计了一种基于凸透镜原理技术的新型雷达,价格便宜,应用范围广泛,军用、民用前景广阔。
[1]蔚道环,孙慧玲,阎淑华.物理教与学[M].北京:测绘出版社,1992.
[2]宋大卫.物理应用基础[M].北京:人民卫生出版社,2008.
[3]陈永涛.技术物理基础[M].上海:华东师范大学出版社,2001.
[4]朱 娜.太阳能光热电站发电子系统热力设备设计计算[D].成都理工大学,2010.
[5]陈夫进,赵明勤,赵廷林,等.太阳能集能器自动跟踪装置[J].可再生能源,2006,(1):30~32.
[6]邓昭华.光触媒作用下聚光太阳光对垃圾渗滤液有机质的降解[D].华中科技大学,2011.
[7]孙迎光.自动跟踪聚焦式太阳能光伏发电技术[J].能源工程,2002,(3):7~10.
