星载微光立体CCD相机成像系统设计
2014-11-09胡晓华张红雷郝朝霞
胡晓华, 张红雷, 夏 明, 郝朝霞
(北京5111信箱 北京 100094)
引 言
近年来的高技术战争表明,夜间和晨昏时段是作战的多发时段,而低云大雾严重影响作战行动[1],由于红外云图不易区分低云大雾与地表,普通可见光成像设备又难以在低照度条件下工作,因此微光云图是判断夜间和晨昏时段是否存在低云大雾的最有效手段。此外,目前气象海洋卫星测得的信息都是平面的,都是云的水平分布,得不到真正的三维立体云图。而云的立体结构对天气系统模型的构建和准确预报都具有极其重要的意义[2]。目前,三维立体成像技术在测绘等领域均得到广泛应用,效果良好。将此技术应用到云的立体成像,可以更好地构造出云的三维模型,监测低云大雾。
目前,世界上还没有同时具备立体和微光成像能力的相机。鉴于微光成像技术和三维立体成像技术的日益成熟,在前期研制样机的经验基础上,提出一个用于气象海洋卫星的星载微光立体CCD(Chargecoupled Device,电荷耦合元件)相机模型。它通过卫星的飞行运动进行扫描,经过数据匹配、三维重建,可以解算出云的数字高程模型,获得高动态范围和高空间分辨率的三维立体云图,可在多种光照条件下有效监测低云大雾[3]。本文在分析国内外微光成像和立体成像的研究现状及发展趋势的基础上,对其成像原理做了介绍,初步设计了用于星载的微光CCD线阵扫描的立体成像系统,并分析了刈幅宽度、体视深度、基高比和高程分辨率等技术参数的实现结果。
1 国内外研究现状
1.1 微光探测技术
微光云图成像技术是指夜间和晨昏等低照度条件下获得可见光图像的相关技术。目前世界上唯一用于微光云图探测的业务化微光成像载荷是美国国防气象卫星DMSP(Defense Meteorological Satellite Program)Block卫星上的业务线扫描系统OLS(Operational Linescan System)[4,5]。DMSP卫星采用双星运行体制,分为06:00am轨道卫星和10:30am轨道卫星,双星的重复观测周期为12小时。星上搭载的业务线扫描系统OLS由两个光学望远镜和一个光学倍增管组成,可以获得夜间1/4月光条件下微光可见光云图,在一定程度上弥补了传统夜间可见光通道无法探测的缺点,是美国国防部主要的气象信息源,同时也是美军全球气象中心云分析系统的主要信息源。OLS在伊拉克战争中发挥了重要作用。美军在伊拉克战争中,使用了Block 5D-2系列中的三颗国防气象卫星Block 5D-2/F12~F14,并应急发射了一颗Block 5D-3/F15卫星,用于昼夜不间断地提供伊拉克地区的战场气象信息,为美军夜间和晨昏时段实施目标侦察和轰炸提供了重要战场环境信息保障。微光成像设备还能对夜间城市和重要战区灯光和明火实施探测,具有重要的军事价值。
在DMSP/OLS的基础上,美国“国家极轨业务环境卫星系统准备项目”(NPP)上搭载了可见光红外成像仪/辐射计组(VIIRS),它的DNB(Day/Night Band)探测通道继承了DMSP上的OLS微光探测通道,辐射动态范围很大,可以达到107量级。DNB与现行的OLS传感器相比,主要做了以下几个方面的改进和优化:(1)具有更小的瞬时视场,减少了空间图像的模糊程度;(2)减少了像元饱和情况的发生;(3)增加辐射订正功能,以得到更高的辐射分辨率;(4)与VIIRS其他通道共用一套光学和扫描装置,可更精确获知各波段像元的相对定位,有利于与其他传感器多光谱探测资料的融合[6]。
目前我国在轨运行的气象卫星上只有可见光红外扫描辐射计,获取白天可见光云图和昼夜红外云图,尚没有微光云图成像仪在轨运行。中科院上海技术物理研究所和航科集团508所都完成了微光相机的预研工作,并研制了工程样机,可在1/4月光甚至星光照度条件下成像。
1.2 立体成像技术
目前立体CCD相机多作为测绘卫星上的主要载荷[7,8],还没有气象海洋卫星搭载立体相机的先例。立体成像技术的研究在国际上始于上世纪八十年代初期,德国首先开展了MEOSS试验,随后制定了MOMS-01和MOMS-02计划,研制多光谱扫描成像系统和多相机扫描立体成像系统。其中高分辨率直视扫描仪的分辨率为4.5m,立体图像的高度分辨率达12m。日本在其发射的“月亮女神”探月卫星上装载了立体成像相机,分辨率为10m。法国在SPOT-5卫星上,装载了两套高几何分辨率的立体成像仪(HRS),一个向前,一个向后,可形成立体图像,其地面分辨率可达10m。美国和苏联也把空间立体成像技术作为遥感传感器的发展重点,已经研发了几种用于空间遥感的立体成像系统。美国发射的TERRA卫星上搭载的高级星载地球热发射、反照辐射计(ASTER)上,一个镜头向下观测,另一个镜头向后观测,在同一轨道上具有立体成像能力。NASA发射的两台太阳观测仪(STEREO),像一双人眼一样从地球运行轨道外的两个有利位置上观测太阳,形成对太阳喷发及其对地球影响的三维观测。美国“凤凰”火星探测器也具有立体成像功能。这些卫星的传感器多采用线阵CCD探测器,按照推扫式扫描成像。为获得同轨立体成像,在沿轨方向上前视、后视成像,形成无明显时差的立体覆盖。
我国首颗探月卫星“嫦娥一号”于2007年10月24日发射升空,星上装载了CCD立体相机和激光高度计。CCD立体相机以自推扫模式工作,卫星在飞行时沿飞行方向对月表目标进行推扫,可获取月表同一目标星下点、前视16.7°、后视16.7°三幅二维原始数据图像,经辐射定标,重构月表三维立体影像。同时激光高度计测量卫星到星下点月球表面的距离,与卫星轨道参数相结合,可提供三维影响处理所需的参数。
2 微光立体成像原理
月光、星光和大气辉光等微弱的“可见”光也就是夜间的可见光,统称微光[5]。微光云图成像技术是指夜间和晨昏等低照度条件下获得可见光图像的相关技术。微光成像与可见光成像原理基本相同,只是在探测仪器的灵敏度和动态范围上具有更高要求。下面重点对立体成像原理进行介绍。
空间立体图像通常是靠空间体视效应实现的,其体视觉深度和分辨率取决于体视仪器的基线长度。为了增加体视深度和分辨率,就必须加大基线长度。目前星体的尺寸均在几米和十几米范围,在这样的长度范围内装置空间立体相机,其基线长度一般不会超过10m,这样的基线长度所达到的体视深度,远远满足不了立体成像的要求,实际上也得不到测量要求的立体图像。为了增加基线长度,一般在星体上采用前视、直视和后视的方式安装三个CCD扫描阵列(如图1所示)[9,10],以达到一定的基高比。基高比越大,立体成像效果越好。目前世界上主要的空间立体相机的基高比都大于0.6,有的甚至达到1.0。
这样在卫星飞行中依次对地面进行扫描,可以在三个相近时刻得到同一地面目标在三个不同视角下的图像。工作过程如图2所示
在T0时刻,前视阵列A在+Y的倾角下获得地物目标P处的信息,当飞行到T1时刻时,直视阵列B在直视下获得P的信息,飞行到T2时刻时,后视阵列C在后倾角 -Y下获得P的信息。T0和T2时刻,两个摄影位置对同一地面进行摄影,获得一个立体像对,经过后期数据处理,可以得到立体图像。
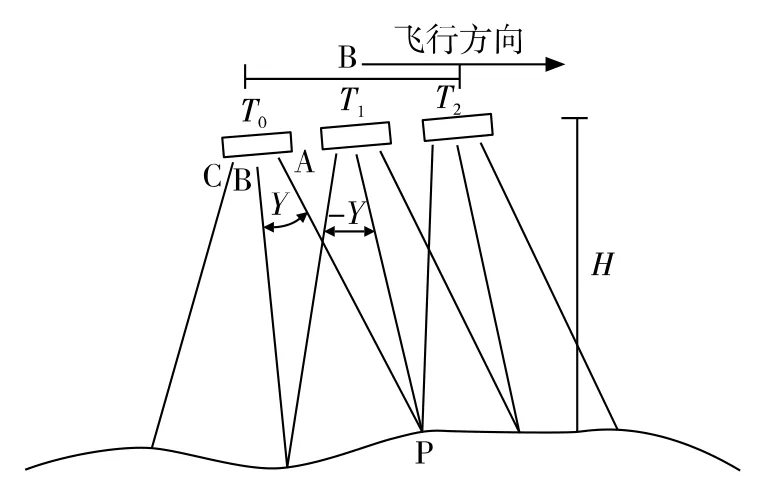
图2 地物点P立体像对获取示意图
3 成像系统设计
要想在气象海洋卫星上实现微光立体成像,有效监测低云大雾,探测云的三维立体结构,则需要大的刈幅宽度(卫星扫过的宽度)和有效立体观测技术,并且要有较大的体视深度和较高的高程分辨率。
3.1 多镜头立体观测布局
气象海洋预报保障要求卫星观测具有宽的探测范围,这就要求微光立体相机应具有宽视场覆盖能力。目前对于推扫式成像仪实现宽视场覆盖技术的方案主要分为两大类。第一类是采用单个超广角光学系统和单个大规模长线列探测器构成的宽视场成像系统,但其成像性能(视场能量分布和像差校正)难以保证和提高,图像边缘的空间分辨率下降非常严重,大规模探测器的采购和成本均存在问题。第二类是采用较小视场光学系统和较小规模探测器构成成像模块,并由多个成像模块进行视场合成,实现宽视场覆盖,MERIS就是采用这种视场分割方案。此方案中的光学系统和探测器均可保证技术性能以及获取渠道。从实际结果来看,第二类方案光学系统设计和装校简单,方案可行。
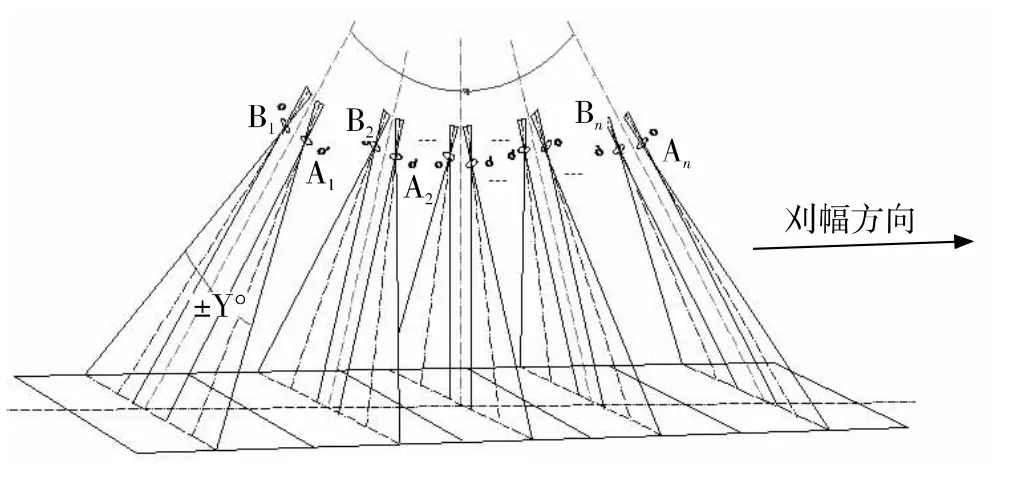
图3 立体相机视场覆盖示意图
云的立体观测可以得到云高、云的形状和结构信息,有利于区分云和地表,增进对飓风和强风暴等的了解[11]。但目前气象海洋卫星探测得到的云图都是单视角的二维平面云图,无法提取出高程信息。要想获得立体观测效果,可采用2n个相同的中等视场的光学镜头,将其分为A、B两组,A组为前视相机,B组为后视相机,每组n个镜头,如图3所示。每组内的n个镜头在刈幅方向(卫星扫描方向)上依次按扇形排列,镜头之间的夹角按总视场等分设计。中间一个对中观测,其它n-1个倾斜观测,每个成像模块中配置一片CCD(1024×1024)探测器。这样两组相机就形成±Y°的前视和后视立体成像角度,形成前视1线列(前视相机第1024行)、后视1线列(后视相机第1行)、星下点正视1线列(前视相机第1行)的3线列立体成像探测。这样的设计既实现了宽视场覆盖,又实现了空间立体观测。
微光立体CCD相机采用模块化设计方案:系统由2n个性能完全相同的具有中等视场的成像模块、1个综合电子模块以及相机平台组成。微光立体CCD相机的系统总体功能框图如图4所示。
每个成像模块单独完成中等视场的低光照观测功能,输出数字图像信号。综合电子模块能够同步提供2n个成像模块的驱动时序信号,以及对成像模块的工作模式控制与通信,完成对2n个成像模块的通光口径控制,并对数字图像输出进行数据处理。
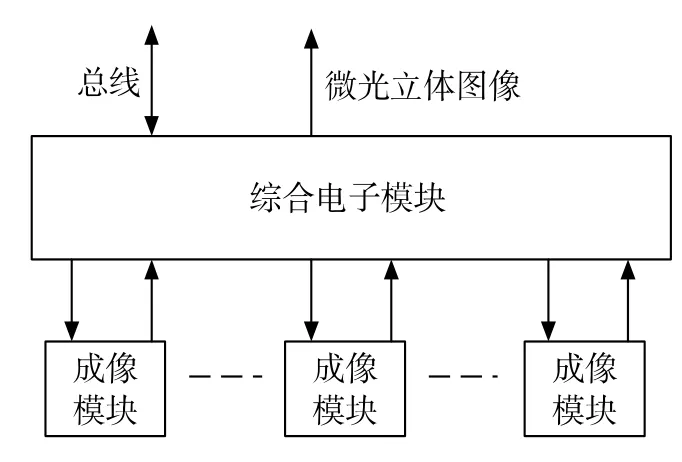
图4 微光立体CCD相机系统总体功能框图
3.2 刈幅宽度
各类天气系统和海洋现象的特点是空间尺度大、发展变化快,大尺度天气系统的水平尺度在1000~3000km之间,海洋中尺度现象的水平尺度为几十至几百千米。因此,为完整监测大尺度天气系统和海洋中尺度现象,气象海洋卫星仪器一般都要求观测幅宽较大。另外,幅宽大的仪器重复观测周期短,也有利于监测天气系统和海洋现象的发展变化。
刈幅宽度和总视场之间的关系由式(1)决定。

其中,W为刈幅宽度,Re为地球半径,H为卫星轨道高度,单位均为km。FOV为总视场角,单位为(°)。
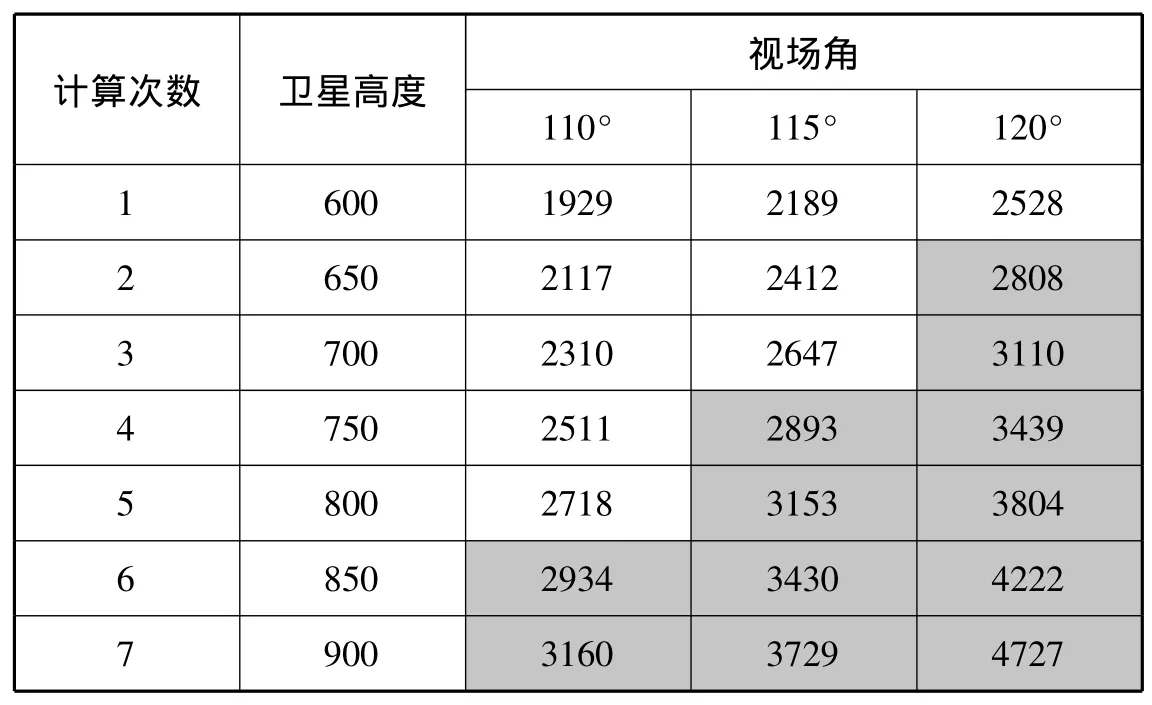
表1 视场角与刈幅宽度实现结果(单位:km)
表1是搭载微光立体相机的气象海洋卫星可实现的视场角和刈幅宽度。可以看出,卫星高度越高、视场角越大时,幅宽越宽。目前在轨运行的气象卫星光学成像载荷的幅宽都在2800km以上,因此选择表1中灰色区域的卫星高度和立体视场角组合,可实现气象海洋探测需要的幅宽。
3.3 体视深度
立体图像的体视深度和分辨率取决于体视仪器的基线长度(对于人眼,就是瞳孔距)。人眼的瞳孔距一般为55~65mm,经过计算其体视深度为1000m左右,体视分辨率也不高。为了增加体视深度和分辨率,就要加大基线长度。目前飞机和星体的尺寸为几米到十几米,在这样的尺寸范围内安放空间体视设备,其基线长度一般不会超过10m。这样的基线长度所能达到的体视深度,远远满足不了星载立体成像的要求,实际上得不到立体图像。
体视深度的表达式为:

其中,B为基线长度,IFOV为仪器的瞬时分辨率。从式(2)可以看出,为了增加体视深度,应增加基线长度,减小仪器的瞬时分辨率。
首先分析本成像系统的基线长度。在卫星飞行过程中,实现对地物目标的扫描成像,在一定的时间间隔内前视和后视相机可以获得同一目标在不同视角下的信息,如图2所示。实际上在(T2-T0)的时间间隔内载体飞行的水平距离就是基线长度。该长度与飞行速度、相机的前后倾夹角以及飞行高度有关,即

式中,H为飞行高度,V为平台(卫星或飞机)飞行速度,Y为对称立体角,T0和T2是前、后视相机对同一地物点的成像时刻。可以把这样获得的基线长度称为合成基线长度。
仪器的瞬时分辨率IFOV是像元尺寸与焦距的比值,即

式中,GSD为地面像元分辨率,f为焦距,d为探测器相邻像元中心距。随着焦平面探测器水平的进步,填充因子能达到100%,可以认为探测器像元尺寸与相邻像元中心距相等。按照目前气象海洋卫星光学仪器的星下点分辨率和卫星高度,如果取GSD=250m,H为800km,则IFOV=0.3125mrad,B=H×0.67=536km,根据式(2),体视深度为D=536/0.3125=1.7×103km。显然,这对于轨道高度在1000km以下的遥感立体成像毫无问题。
考虑到工程设计,比较合理的途径是在可能获得的探测器规格中,在中等地面分辨率情况下,选择像元尺寸较大,使得采用焦距相对较长的光学系统,能降低光学设计难度,并且保证较高的像质。图5是选用的焦平面(FPA)探测器照片。
3.4 高程分辨率
高程分辨率ΔH决定了立体相机对于高程数据的测量精度[12],它取决于三方面因素:基高比(B/H)、地面分辨率(GSD)和像点量测精度,即

其中,K是立体像对重组时像点坐标量测精度的倒数,目前一般能够达到的像元坐标量测精度为0.5个像元,即K=2。
基高比(B/H)就是摄影基线B和航高H的比值。根据式(3),基高比为:

根据式(5)和式(6)可以计算出系统的高程分辨率。
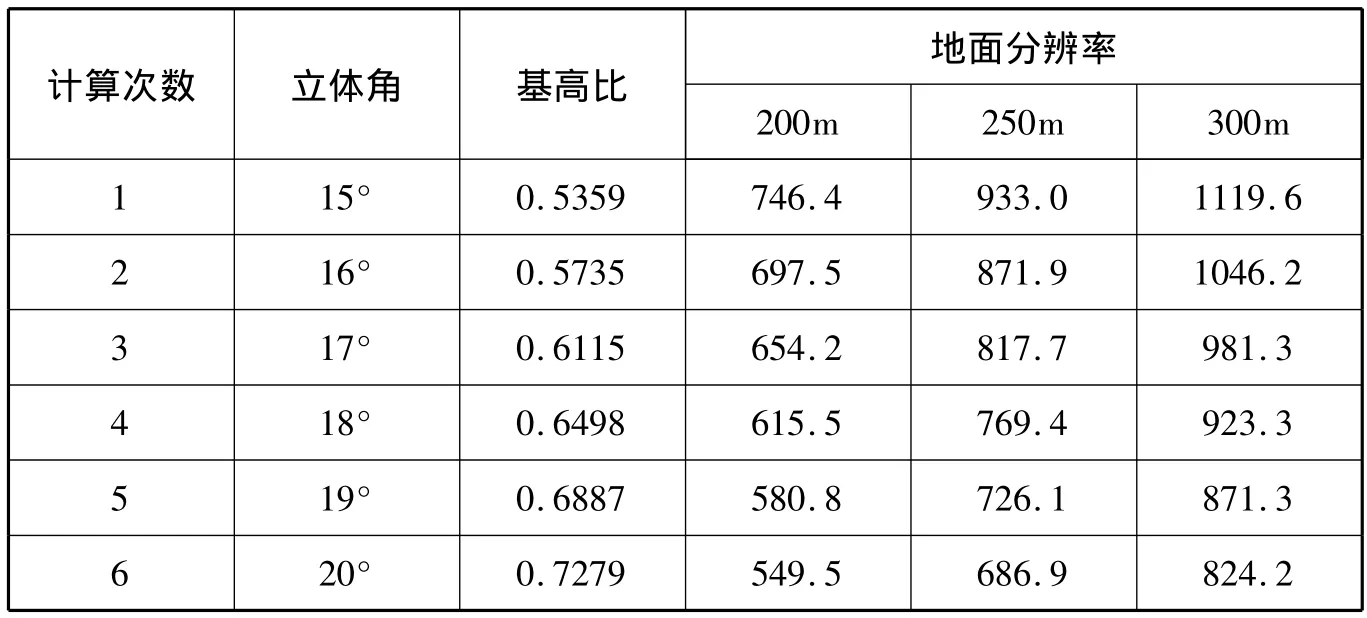
表2 高程分辨率实现结果(单位:m)
表2是不同立体角及地面分辨率相应的高程分辨率结果。立体角Y范围在±15°~±20°,基高比>0.6,是立体成像最佳配置要求,也是国际上大多数立体相机采用的基高比。目前气象海洋卫星光学仪器的白天可见光通道和红外通道的星下点分辨率最高可达250m[13]。因此,表2中立体角大于17°时,基高比>0.6,立体角越大,高程分辨率越高(数值越小),测量精度越高。如果地面分辨率优于当前星下点分辨率250m,则高程分辨率小于817.7m。
常见的云高在几十公里以下,厚度为0~20km,目前美国专用云探测卫星Cloudsat上搭载的云廓线雷达垂直分辨率为500m,817.7m的高程分辨率可以识别较厚的云层,尤其是对流云系。
4 结束语
本文根据晨昏及夜晚月光等微弱光照条件下监测低云大雾以及云三维立体成像的需求,提出了星载微光立体成像技术,介绍了微光成像和立体成像的原理,设计了成像系统,并对系统参数进行了分析。根据前期载荷试验和气象海洋卫星常用轨道数据进行仿真计算,结果表明:采用星载微光立体成像技术,微光立体相机的扫描幅宽可达到2800km以上,体视深度在1000km以上,高程分辨率可达到817.7m,可在低照度条件下监测低云大雾,获取高分辨率的三维立体云图,满足气象海洋探测的需求。
[1]蒋璐璐,魏 鸣.FY-3A卫星资料在雾监测中的应用研究[J].遥感技术与应用,2011,26(4):489~495.
[2]申闫春,肖 鹏,孙兴义.基于卫星云图的三维立体云仿真[J].计算机仿真,2010,27(12):289~292.
[3]胡晓华,周晓中,刘松涛.星载微光立体成像技术及实现[J].中国光学,2013,6(5):701~709.
[4]周小珂,严 卫,白 衡,等.基于DMSP/OLS数据的夜间低云大雾监测技术研究[J].遥感信息,2012,27(6):86~90.
[5]陈 晋,卓 莉,史培军.基于DMSP/OLS数据的中国城市化过程研究[J].遥感学报,2003,7(3):168~175.
[6]周润松,葛榜军.美国新一代气象卫星系统发展综述[J].航天器工程,2008,17(4):91~98.
[7]苗健宇,张立平,翟 岩.三线阵CCD立体测绘相机的集成装调[J].中国光学,2012,5(4):366~372.
[8]田铁印,王 红,冯晟杰.三线阵测绘相机光学系统的杂光分析与计算[J].中国光学,2012,5(6):583~589.
[9]王 红,田铁印.三线阵测绘相机光学系统的设计和公差分析[J].光学精密工程,2011,19(7):1444~1450.
[10]武星星,刘金国.三线阵立体测绘相机时间系统优化与实时检测[J].光学精密工程,2012,20(5):1022~1030.
[11]李艳兵,黄思训,翟景秋.云的立体观测研究进展[J].热带气象学报,2008,24(6):743~747.
[12]张彩霞,杨勤科,段建军.高分辨率数字高程模型的构建方法[J].水利学报,2006,37(8):1009~1014.
[13]杨何群,周红妹,尹 球.FY-3气象卫星MERSI数据快速预处理的IDL实现[J].遥感技术与应用,2012,27(4):566~574.