基于双梯度下降法的内置式永磁同步电动机精确转矩控制
2014-10-31华新强李红梅
华新强,李红梅
(合肥工业大学,合肥 230009)
0 引 言
内置式永磁同步电动机(IPMSM)具有功率密度大、动态响应快、效率高、运行可靠及无刷化等优点,广泛应用于纯电动汽车和混合动力汽车的电驱动系统。电动汽车电驱动系统不仅要求低速时输出转矩大,还要求具有良好的弱磁扩速性能。为此,通常对矢量控制的IPMSM系统采用最大转矩电流比(MTPA)控制和弱磁控制[1-2],实现该系统在宽调速范围内的高效节能运行。
针对IPMSM系统的弱磁控制,目前主要的弱磁控制方法包括负直轴电流补偿法[3-4]、基于查表的前馈控制法[5]、磁链观测器法[6-8]、最优电流指令值实时在线计算法[9]以及基于梯度下降法[10]等。负直轴电流补偿法通过设计电压反馈控制器,增加直轴去磁电流并限制电流调节器的输出幅值使之小于逆变器输出电压极限,具有自动调节弱磁区电流指令值,对电机参数依赖性小和鲁棒性好的技术优势,但系统响应速度有待提升。基于查表的前馈控制需要两个二维指令表,根据指令转矩与实际转速再通过查表来获得定子电流指令,具有系统响应速度快和鲁棒性好的技术优点,缺点是需要预先计算出表格中的大量数据,占用存储空间。磁链观测器法采用电压反馈和指令表相结合,利用指令转矩和定子磁链生成定子电流指令表,再根据电压反馈获得的定子磁链观测值和输入的指令转矩经查表获取定子指令电流。
在线计算的方法是基于费拉里法在线求解PMSM系统MTPA控制和弱磁控制模式下定子电流指令所满足的一元四次方程,但是实时在线计算对系统的硬件要求高,工程应用中较少采用。
基于梯度下降法的弱磁控制无需查表,通过不断修正定子电流变化方向,并利用电压反馈的误差来修正定子电流指令值,实现弱磁控制,具有无需查表即可自适应获取弱磁控制时的定子指令电流的技术优势,但该方法只考虑了定子指令电流沿着等转矩曲线切向修正的情况,对于给定参考转矩,仅包含定子电流闭环控制的IPMSM系统,基于梯度下降法进行弱磁控制时,存在实际转矩不能准确跟踪任意变化的指令转矩的技术不足。
在基于梯度下降法IPMSM系统弱磁控制的启发下,本文架构了新型IPMSM驱动系统,该系统在低速时基于查表方法获取定子指令电流实现MTPA控制;系统在高速运行时,将定子指令电流沿着等转矩曲线的法线修正方向和切线修正方向相结合,提出无需查表的基于双梯度下降法的新型弱磁控制策略,同时兼顾MTPA控制与弱磁控制之间的平滑切换,旨在实现IPMSM系统在宽调速范围运行时,系统的输出转矩对任意变化的指令输入转矩的准确跟踪。
1 IPMSM数学模型及边界约束
1.1 IPMSM数学模型
同步旋转坐标系中,IPMSM定子电压方程可以表示:
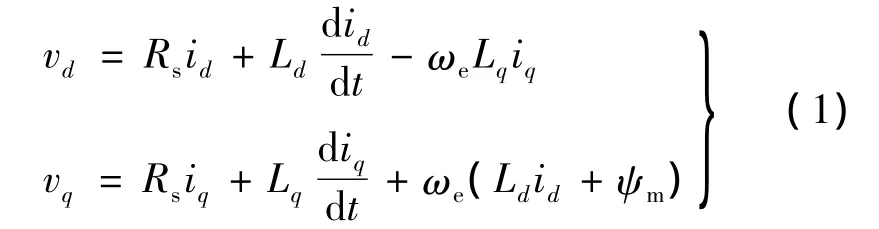
式中:id,iq,vd,vq分别表示 d,q 轴定子电流和定子电压;ωe表示电机电角速度;Ld,Lq表示电机d,q轴电感;Rs是定子电阻;ψm为永磁体磁链。
电磁转矩表达式:

式中:p表示电机极对数。
电机的机电运动方程:

式中:TL表示负载转矩;J,ωm分别表示电机转动惯量和机械角速度。
1.2 基本边界约束
IPMSM的可控运行区域受到电流极限圆和电压极限圆的约束[11],若忽略定子电阻影响,电流极限圆和电压极限圆约束可以表示:

式中:Vs是逆变器的最大输出电压,空间矢量脉宽调制(SVPWM)下逆变器输出最大相电压幅值为Vdc表示逆变器直流侧电压;Is为电机的最大输出电流。
定子电流指令所需满足的基本约束边界如图1所示。电流极限圆的圆心落在原点,半径为Is;电压极限圆为椭圆,椭圆中心为(-,0),随着电机转速增加,电压极限圆逐渐缩小。电机稳定可控的区域为电流极限圆与电压极限圆重叠区域,随着电机转速的增加,电压极限圆逐渐缩小,当电机深度弱磁到极限转速时,两者不再有重叠区域,系统将失稳。

图1 定子电流指令所需满足的基本约束边界
图1中的OAB表示电机输出最大转矩时的电流轨迹,电机转速小于基速时,电机运行于MTPA区域,工作点落在MTPA曲线上,如OC段;当电机转速逐渐上升,由于受电压极限圆的约束,电机恒转矩弱磁运行,工作点会沿等转矩曲线运动,如CD段,此时电机转速继续上升,受到电流极限圆的约束,电流指令会沿着电流极限圆运动,电机恒功率运行,如DB段。
2 基于梯度下降法的IPMSM弱磁控制
梯度下降法是按照等转矩曲线方向修正获得PMSM弱磁控制时的定子电流指令,输出转矩实现精确控制的关键在于定子电流指令初始点是否位于指令转矩对应的等转矩曲线上。
电机运行于弱磁区,假设指令转矩为Te1,如图2所示,变化之前指令电流位于A)点,A 点位于Te1等转矩曲线上,则:
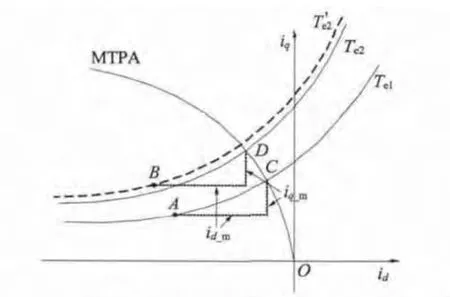
图2 转矩变化时定子电流指令点误差分析

C(id_MTPA1,iq_MTPA1)点为 Te1对应的 MTPA指令点,id_m,iq_m为当前定子电流指令的修正值。
假定参考转矩指令从Te1变为Te2,由于电流指令修正值在该时刻未发生变化,所以定子电流指令初始点将跳变到B)点,即有:

D(id_MTPA2,iq_MTPA2)点为 Te2对应的 MTPA指令点。由于等转矩曲线和MTPA曲线的非线性特点,B点没有落在Te2等转矩曲线,而是落在等转矩曲线上,随后定子电流指令都会沿着等转矩曲线调节,导致实际输出转矩和指令转矩Te2之间存在误差。
当电机指令转矩恒定而由MTPA区域进入弱磁区域时,由MTPA点确定该指令转矩下弱磁电流修正的初始点。一旦电机已进入弱磁区运行而指令转矩发生变化后,梯度下降法不能够快速稳定地将电流指令初始点准确定位在期望的等转矩曲线,一旦电流指令初始点发生偏移,定子电流指令就会沿着不同于指令转矩的等转矩曲线修正,导致系统输出转矩偏离指令转矩。
3 基于双梯度下降法弱磁控制的IPMSM驱动系统
基于双梯度下降法弱磁控制的IPMSM驱动系统结构框图如图3所示,IPMSM在恒转矩区运行时,基于费拉里方法离线计算获得MTPA定子电流指令并生成表格,利用查表获得MTPA控制时的d,q轴定子电流指令。
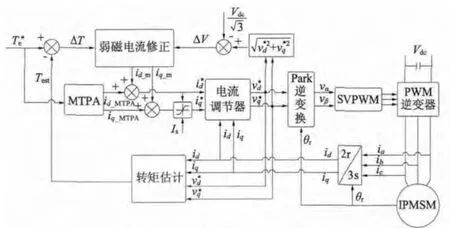
图3 IPMSM驱动系统结构框图
考虑到定子电流修正的二个重要因素,即定子电流修正的方向和修正电流的大小,如图4所示。基于双梯度下降法的弱磁控制策略,是将等转矩曲线的法线和切线方向相结合,两个方向上修正电流的大小则通过转矩反馈环与电压反馈环相结合并经由弱磁电流修正模块,在无需查表下自适应获取弱磁控制时系统的定子指令电流,同时限制q轴电流,使得定子电流指令的幅值不超过电机最大允许电流值,实现系统的弱磁控制。最后,兼顾MTPA控制和弱磁控制的平滑切换,实现IPMSM驱动系统在宽调速范围内的精确转矩控制。
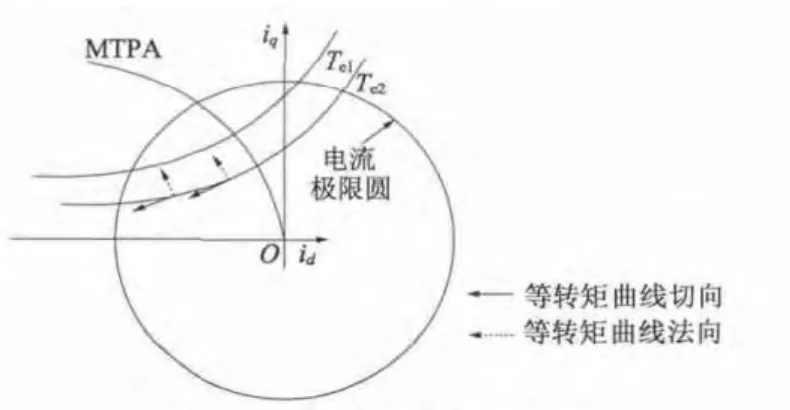
图4 定子电流修正方向
弱磁控制下的定子电流指令:

式中:id_MTPA,iq_MTPA为给定转矩下的MTPA控制时的定子电流指令;id_m,iq_m为弱磁修正电流。
a)沿着等转矩曲线的切线方向修正定子电流指令
当电机的指令转矩不变,电机转速变化时,则沿等转矩曲线的切线方向修正定子电流指令,等转矩曲线的切向量:
给定参考电压与电流调节器输出电压误差:
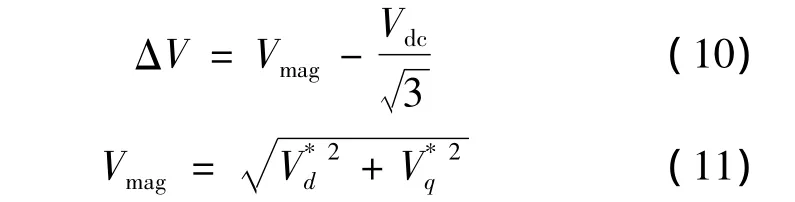
利用ΔV,则有:
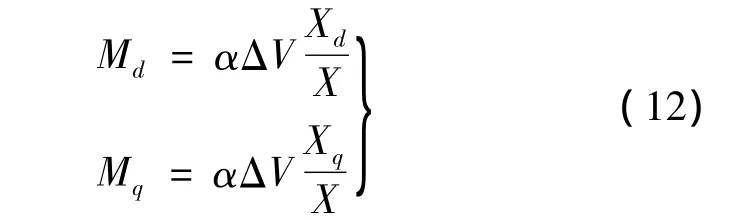
式中:α是比例系数。
b)沿着等转矩曲线的法线方向修正定子电流指令
当电机指令转矩实时变化时,引入转矩反馈闭环,并沿着等转矩曲线法线方向修正定子电流指令来实现指令转矩的精确跟踪。其实现思路是:当估计的电机电磁转矩小于指令转矩时,电流指令沿着等转矩曲线法向正方向变化,增大输出转矩以实现指令转矩的跟踪;当估计的电机电磁转矩大于指令转矩时,电流指令沿着等转矩曲线法向负方向变化,减小输出转矩以实现指令转矩的跟踪。
当电机高速稳态运行时,式(1)可以表示:

将式(13)代入式(2)可得电机电磁转矩估计表达式[12]:

式中:vd,vq是逆变器的控制电压,实际可取电流调节器的输出电压。
基于IPMSM驱动系统电流传感器获取的定子电流、旋转变压器获取的转速及电流调节器的输出电压,实现电机高速弱磁运行时的电磁转矩估计,具有不受电机磁路饱和及交叉耦合导致的电感参数变化和温度变化等导致的永磁体磁链变化影响的技术优势。电机的电阻值很小,因此采用式(14)估计电磁转矩是合理的,避免设计复杂的转矩观测器[13]。而当电机高速运行时,ωe较大,采用式(14)又避免转速微小波动造成估计转矩的较大波动。
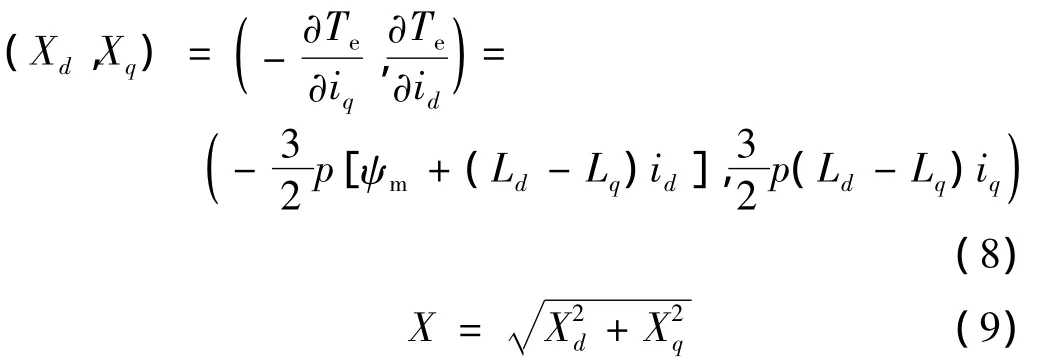
等转矩曲线的法向量:

则给定转矩与估计电机电磁转矩的误差:

式中:β是比例系数。
由梯度下降法,自适应获得的弱磁区定子电流指令修正值:

式中:Md,Mq表示当前采样时刻电流在等转矩曲线切向的修正值;Nd,Nq表示当前采样时刻电流在等转矩曲线法向的修正值。
IPMSM驱动系统MTPA控制和弱磁控制的平滑切换是通过 id_m的值来确定,当id_m≥0时,id_m,iq_m都设置为0,经查表获得MTPA控制模式下的定子电流指令,系统运行在MTPA控制模式;当id_m<0时,由式(7)和式(19)自动获取系统弱磁控制模式下的定子指令电流。
为了防止定子指令电流幅值超过电机最大允许电流Is,通过在q轴电流指令中增加限幅环节来限制电机的输出电流,d轴定子电流指令依然通过算法获得,而q轴定子电流指令则是根据d轴指令进行相应的调整,其表达式:

4 IPMSM驱动系统仿真与分析
IPMSM参数如表1所示,对IPMSM驱动系统进行仿真研究,该系统为有限扩速比系统,存在极限弱磁速度。

表1 IPMSM参数
设定指令转矩为120 N·m,电机转速从0逐渐增加到6000 r/min,系统动态如图5所示。电机从MTPA区逐渐弱磁到指定工作点稳定运行,能够实现从MTPA到弱磁控制的平滑切换。当电机运行于MTPA区域时,逆变器电压未饱和,ΔV小于0,此时弱磁算法不会产生弱磁电流修正值,定子电流指令完全由MTPA指令表产生。电机进入弱磁区后,弱磁算法会产生附加的修正电流使得d轴电流逐渐减小,系统始终产生恒定转矩。当电机电流达到最大电流值时,电机转速继续增加,电机输出转矩会逐渐减小,电机恒功率运行,整个运行过程的定子电流指令轨迹如图6所示。
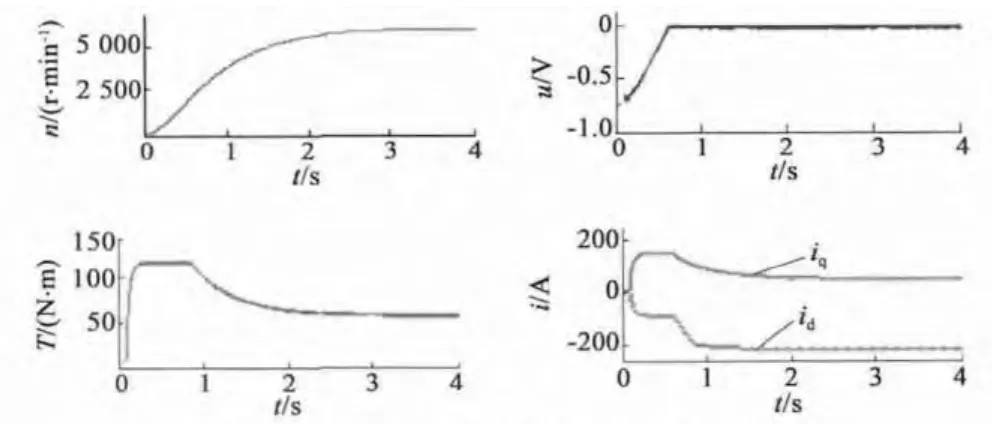
图5 IPMSM系统弱磁区恒转矩运行
设定电机转速从零逐渐上升至4000 r/min,指令转矩从60 N·m增加到80 N·m后又回到60 N·m,系统动态转矩控制性能的测试结果如图7所示。当电机指令转矩恒定而转速改变时,梯度下降法和双梯度下降法均能够准确输出转矩。当电机进入弱磁区运行,而且指令转矩发生变化,梯度下降法不能实现输出转矩对于指令转矩的准确跟踪,基于双梯度下降法弱磁控制的系统能够实现输出转矩对于指令输入转矩的准确跟踪,如图7所示。系统仿真结果表明:针对任意变化的输入参考转矩,本文的IPMSM驱动系统不仅能够实现MTPA控制和弱磁控制间的平滑切换,而且能够实现输出转矩对于指令输入转矩的实时准确跟踪。

图6 电流轨迹图

图7 不同弱磁控制策略下IPMSM系统的转矩输出动态
5 方案验证
该部分是将不同转速、不同转矩下IPMSM驱动系统生成的定子最优指令电流,与基于费拉里方法准确计算获取的同样运行工况下的定子最优指令电流进行比较。
假定电机稳态工作转速为3000 r/min、4000 r/min、5000 r/min,指令转矩从20 N·m变化至160 N·m。首先将转速增加到稳态工作转速,然后逐渐增加指令转矩,每增加20 N·m进行一次测试,分别记录每个测试点的电机稳态定子最优指令电流,绘制不同工作点的电流指令图,如图8所示,图中◦代表基于费拉里法的定子最优指令电流准确计算值,*代表由本文的系统自动生成的定子最优指令电流。
数据对比发现,定子电流指令间存在误差,但误差较小。分析误差存在的原因:基于费拉里方法准确计算获取定子最优指令电流时,忽略了电机电阻对电机端电压约束方程的影响,而本文的弱磁控制器是通过电压反馈调节,计及了电机电阻对电机端电压约束方程的影响,自动生成定子最优指令电流,导致定子电流最优值间存在差距。鉴于电流指令误差在允许范围内,证实了无需查表的基于双梯度下降法的IPMSM的弱磁控制策略能够较准确获取电机稳态运行的定子最优指令电流,实现IPMSM驱动系统在弱磁扩速时的精确转矩控制。
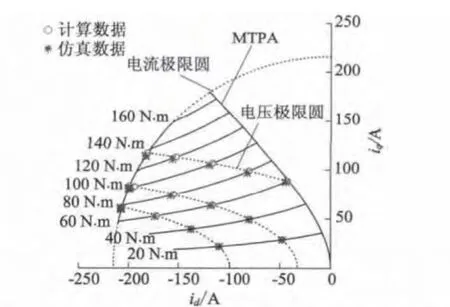
图8 不同方法获取的定子最优指令电流比较图
6 结 语
本文架构了给定参考转矩的电流闭环控制的新型IPMSM驱动系统,该系统基于费拉里方法获取最优定子指令电流实现恒转矩区的MTPA控制。在基于梯度下降法的弱磁控制思想的启发下,引入电流指令沿等转矩曲线法向修正的方向,提出了基于双梯度下降法的新型弱磁控制策略,在任意变化的转矩输入条件下,定子电流指令能够最快速地沿着等转矩曲线的法线方向将定子电流指令初始点定位在指令转矩对应的等转矩曲线上,再在无需查表情况下,沿着等转矩曲线的切线方向自适应地获取弱磁控制时系统的定子最优指令电流,实现系统高速运行时的弱磁控制。系统仿真研究结果和方案测试结果证实了本文的IPMSM驱动系统不仅具有良好的动、静态性能和鲁棒性强的技术优势,给出的系统MTPA控制和弱磁控制的平滑切换判据能够实现系统实现不同控制模式的平稳切换,确保整个宽调速运行范围内,该系统均能实现输出转矩对任意变化的指令输入转矩的准确跟踪。
[1]白玉成,唐小琦,吴功平.内置式永磁同步电机弱磁调速控制[J].电工技术学报,2011,26(9):54 -59.
[2]赵云,李叶松.永磁同步电机宽范围最大转矩控制[J].电工技术学报,2010,25(7):45 -50.
[3]JANG M K,SEUNG K S.Speed control of interior permanent magnet synchronous motor drive for the flux weakening operation[J].IEEE Transactions on Industrial Electronics,1997,33(1):43 -48.
[4]朱磊,温旭辉,赵峰,等.永磁同步电机弱磁失控机制及其应对策略研究[J].中国电机工程学报,2011,31(18):67 -72.
[5]BUMSIK K,MUSHIN K,TAEHWAN C,et al.A method for improving HEV motor system efficiency considering battery voltage variation[C]//2011 IEEE 8th International Conference on Power Electronics and ECCE Asia(ICPE & ECCE),2011:677-682.
[6]BAE B-H,PATEL N,SCHULZ S,et al.New field weakening technique for high saliency interior permanent magnet motor[C]//Industry Applications Conference,38th IAS Annual Meeting,2003,2:898-905.
[7]KWON T-S,CHOI G-Y,KWAK M-S,et al.Novel fluxweakening control of an IPMSM for quasi-six-step operation[J].IEEE Transactions on Industrial Electronics,2008,44(6):1722-1731.
[8]CHENG Bing,TESCH T R.Torque feedforward control technique for permanent-magnet synchronous motors[J].IEEE Transactions on Industrial Electronics,2010,57(3):969-974.
[9]JUNG S-Y,HONG J,NAM K.Current minimizing torque control of the IPMSM using ferrari's method[J].IEEE Transactions on Industrial Electronics,2013,28(12):5603-5617.
[10]YOON Y-D,LEE W-J,SUL S-K.New flux weakening control for high saliency interior permanent magnet synchronous machine without any tables[C]//Power Electronics and Applications,2007 European Conference,2007:1-7.
[11]SOONG W L,MILLER T J E.Field-weakening performance of brushless synchronous AC motor drives[J].IEE Proceedings of Electric Power Applications,1994,141(6):331-340.
[12]NAKAI H,OHTANI H,SATOH E,et al.Development and testing of the torque control for the permanent-magnet synchronous motor[J].IEEE Transactions on Industrial Electronics,2005,52(3):800-806.
[13]郑泽东,李永东,肖曦,等.永磁同步电机负载转矩观测器[J].电工技术学报,2010,25(2):30-36.