干涉Cartwheel获取高精度DEM的联合校准技术
2014-10-30李品
李 品
(南京电子技术研究所, 南京210039)
0 引言
卫星编队是指若干颗卫星在围绕地球运动的同时,保持彼此之间特定的相对位置关系,共同合作完成某些特定的空间任务。干涉Cartwheel[1]为分布式小卫星编队的一个重要应用,它能充分利用编队卫星构成的空间基线进行干涉测量,合作实现星载合成孔径雷达(Synthetic Aperture Radar,SAR)的干涉测高[2]、测速[3]、高分辨[4]等多项功能。
利用干涉Cartwheel获取地形数字高程地图(Digital Elevation Map,DEM),用于干涉测量的卫星平台系统参数是影响高程精度的主要原因。为提高DEM精度,可以采用传统InSAR干涉定标方法[5-7],但这些方法均是基于单根基线的干涉平台。干涉Cartwheel各卫星之间可构成多基线干涉平台,且每根基线均可在满足干涉测高条件下[8]获取地形DEM。因此,利用传统方法对各干涉平台一一定标不但增加了复杂度,而且没有利用编队卫星间相对稳定的位置特性。星间相对稳定的位置信息一般都是通过精确星间测角、测距获得的,但高精度的星间测距或测角对编队卫星的成本要求非常高,且精度不高。因此,如何避免高精度的星间测量,而直接利用编队卫星的空间结构信息的研究显得非常必要。
本文利用干涉Cartwheel的编队构形,建立了编队构形误差和各干涉平台参数误差的关系;并以干涉测高误差的线性化模型为基础,联合各干涉平台的敏感度方程,共同合作完成地形高精度DEM的联合校准。该校准算法从传统定标算法的敏感度方程出发,不需要高精度的星间测量技术来确定各干涉平台的空间结构,将编队构形误差与系统参数误差同时代入联合敏感度方程,对各干涉平台进行地形联合校准。仿真表明,干涉Cartwheel测高模型能利用该算法得到较精确的地形DEM。
1 干涉Cartwheel测高模型
干涉Cartwheel[1]是卫星编队的一种重要构形,其稳定的编队构形能实现星间的基线干涉测量。编队中的各颗卫星具有相同的离心率和半长轴,运动在同一轨道平面内,相对运动轨道为短轴(垂直运动方向)是长轴(沿运动方向)一半的椭圆,如图1所示。现有标准构型的编队卫星个数N=3,均匀分布在轨道上(相差120°),为不失一般性,本文讨论中取N≥3。

图1 Catwheel轨道空间构形
图1中的卫星S0与Si(i=1,2)能形成干涉基线,当该基线满足干涉测高条件[7]时,就可对地面进行数字高程重建。图2给出了干涉基线的测高几何模型,其中x轴为平台的运动方向,y轴垂直于平台运动轨道,z轴为地心与运动平台连线的延长方向,θ、Β和H分别为卫星S0的天线俯角、侧视角和对地高程,B为S0与Si形成的基线长度,θc为基线与x-y平面的夹角。在MOD方法的视向量分解坐标系[9]下,可得测绘带内任意一点P的高程重建表达式为
由上式可得:干涉Cartwheel与传统InSAR的测高模型均依赖于系统参数(φ,B,θc,r0,H),因此必须通过系统参数的定标,以获取高精度的地形DEM。
图2 干涉Catwheel测高几何模型
2 测高误差分析
2.1 高程误差的线性化模型
由式(1)可得干涉高程为系统参数的非线性函数。设干涉Cartwheel的编队卫星个数为N,在与其中某一参考卫星S0形成的干涉平台中,满足测高要求的有Ns个(Ns≤N–1),记S0和Si构成的干涉平台为S0Si平台,其平台系统参数向量为 Xi=〔φ,θc,r0,H,,若为Xi的估计值,则测绘带内任意一点P点的高程估计误差为


同一干涉平台下,测绘带内各点重建对应的参数误差一致[4],若在测绘带内放置 L个地面控制点[5],且已知各点的高程为 Pz,l,l=1,2,…,L。由式(3)得系统参数误差的线性化模型为

式中:ΔHi=[εh,i,1,εh,i,2,…,εh,i,L]T,εh,i,l为 S0Si平台下第 l个地面控制点的重建高程误差;Fi=[fi,1,fi,2,…,fi,L]T为 S0Si平台的敏感度矩阵。
2.2 编队构形误差和系统参数误差的关系
干涉Cartwheel的编队构形中,不同的干涉平台具有不同的系统参数,但各干涉平台的系统参数由编队构形的约束而相互关联。设编队中的两颗卫星(Si和Sj)同时与卫星S0形成测高干涉平台S0Si和S0Sj,则两个平台下的r0和H均基于卫星S0,参数是相同的,误差也相等;此时的其他系统参数均与编队构形有关,但受摄动和空间环境的影响,获得的星间相对构形精度较低,引入构形误差,因此需要进一步的分析构形误差与各参数误差之间的关系。
2.2.1 基线倾角误差与编队构形误差的关系
图3为干涉平台S0Si和S0Sj在轨道平面的几何关系图,由编队构形可得两干涉平台的基线倾角关系为θi,j=θc,j-θc,i,且该基线夹角可由构形的距离信息获取

由于构形误差的影响,设由式(5)求得的基线夹角为 θi,j,c,则引入角度误差 δθi,j=θi,j,c– θi,j。设干涉平台S0Sk的基线角度估计值为 θcck,真实值为 θc,k,基线倾角误差 δθcek=θcck– θc,k,k=i,j。则比较 δθcej与 δθcei可得

由以上分析,编队构形引入的角度误差 δθi,j越小,则两干涉平台的倾角误差关系越精确。
2.2.2 干涉相位误差与编队构形误差的关系
图2所示的干涉平台S0Si中Si到目标点P的斜距ri可由几何关系表示为

图3 基线角空间几何模型
则该平台下 点的干涉相位 同2.2.1节分析,对于测高干涉平台S0Si和S0Sj,分别得到φi与φj,联立消去S0的俯角θ,可得φi与φj的关系为
式中:bnk为Bk在z轴的分量,bvk为Bk在x轴上的分量,k=i,j。在干涉测量中,同一距离向上所有目标点的侧视角相同,且斜距r0大大的大于基线长度Bi,则
近似为常数。在同一距离向上,式(8)可表示为

式中:ai,j=bni/bnj;mi,j是 β 的函数。以上关系建立在精确的星间编队构形下,当引入构形误差时,斜率误差为 δai,j=ai,j,c– ai,j。设干涉平台 S0Sk的估计相位为φck,真实值为 φk,干涉相位误差 δφk=φck– φk,k=i,j。比较 φi与 φj得

其中,函数 fi,j(·)和斜率 ai,j均和编队构形有关,式(10)即为编队构形误差和干涉相位误差之间的关系。
3 干涉Cartwheel测高的联合校准与误差耦合
3.1 联合校准的敏感度模型
2.2 节给出了各干涉平台的参数误差和编队构形误差的关系表达式,将它们引入线性化测高误差模型。对于测绘带内第l个地面控制点,由式(3)可得平台S0Si和某参考干涉平台S0Sn(i≠n)的参数误差转换,得

其中


平台S0Si下,对式(4)中的误差线性化模型,令

得

其中,δHi=[δhi,1,δhi,2,…,δhi,L]T;Gi=[gi,1,gi,2,…,gi,L]T。令 δHn=ΔHn,Gn=Fn,将 Ns个干涉平台联立可得

式中:GM为联合敏感度矩阵。式(13)即为多平台的联合敏感度方程,建立了高程重建误差与系统参数误差之间的关系。
3.2 误差的耦合分析
由式(13)可得,联合敏感度方程中的HM与系统参数误差和编队构形误差有关,因此,对于平台S0Si到参考平台S0Sn(i≠n)的参数误差转换中,误差可划分为

其中

由于编队构形的误差未知,因此利用式(13)获取系统参数误差时,oi,l未知。若令其为0,则该部分构形误差将由ΔSn补偿,具体关系如下
在最小二乘的迭代解法中,可以通过迭代修正系统参数误差。在反复的迭代过程中,系统参数的修正可通过式(6)和式(10)不断修正平台间的参数关系,因此oi,l可以在不断的迭代中通过系统关系修正其带来的影响,使oi,l趋近于0,并最终获得修正后的地形DEM。
3.3 地形DEM校准方案
Cartwheel各干涉平台一共构成Ns×L个定标方程,因此,在引入编队构形的冗余信息后,可以采用适当的参数估计方法对其进行估计,从而进行高程地形校准,具体流程如图4所示。
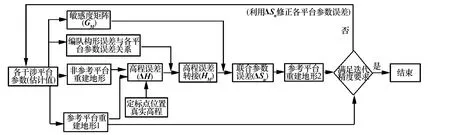
图4 地形校准流程图
以上算法流程中由于编队构形误差与系统参数误差的互相耦合,使系统参数的校准值不可靠,但算法收敛的目标函数是各定标点的真实高程,因此,可重建出精确的地形DEM。
4 算法仿真
选取干涉Cartwheel编队卫星个数N=3,均匀分布在互绕轨道上,且互绕椭圆的短轴为4 000 m,选取某一时刻有效干涉测高平台数Ns=2,各干涉平台参数如下表。

表1 Cartwheel编队卫星的系统参数
以下对于1 km×1 km的平地地形(图5)和复杂地形(图6)分别用本文的校准方法对进行地形高程重建,取地面控制点个数L=4,在测绘带内沿正恻视距离向布放[5],坐标为(500,200)、(500,300)、(500,500)和(500,700)。引入系统参数误差:基线长度误差 δB1=0.2 m,δB2=0.1 m,相位误差 δφ1=6°,δφ2=8°,倾角误差 δθc1=0.003 5°,δθc2=0.002 8°,斜距误差δr0=5 m,平台高度误差 δH=-3 m。
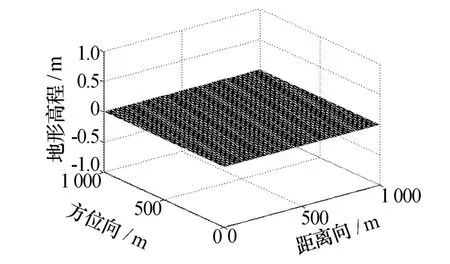
图5 参考平地地形
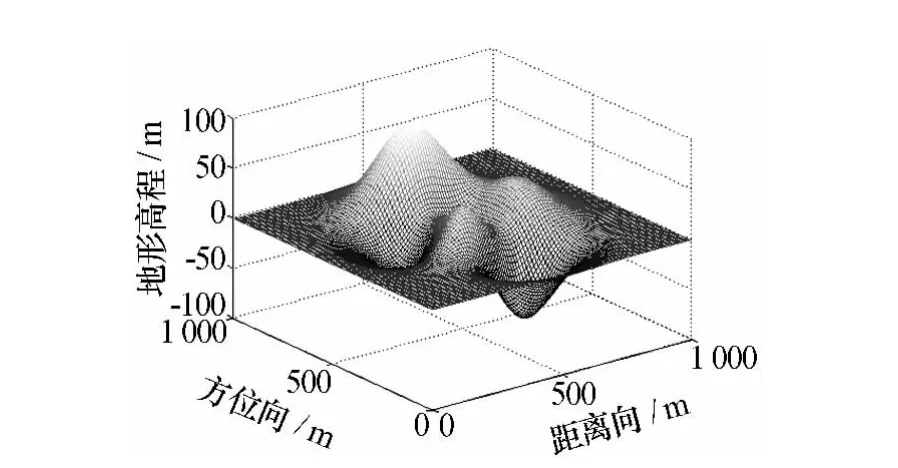
图6 参考复杂地形
引入本文地形校准算法后,不同参考地形下不同参考平台的高程误差,如图7~图10所示。比较各图可见:对于同一参考地形,平台(B1)的重建高程精度较高,这是由于算法是以该平台为参考进行迭代收敛的,因此精度更高;对于同一干涉测高平台,复杂参考地形比平地参考地形的重建高程精度更高,这是因为高度的起伏加大了各参数敏感度的变化,因此联合校准算法中的敏感度矩阵病态性得到一定改善,结果精度更高。

图7 平台(B1)平地地形校准后的高程误差

图8 平台(B2)平地地形校准后的高程误差

图9 平台(B1)复杂地形校准后的高程误差
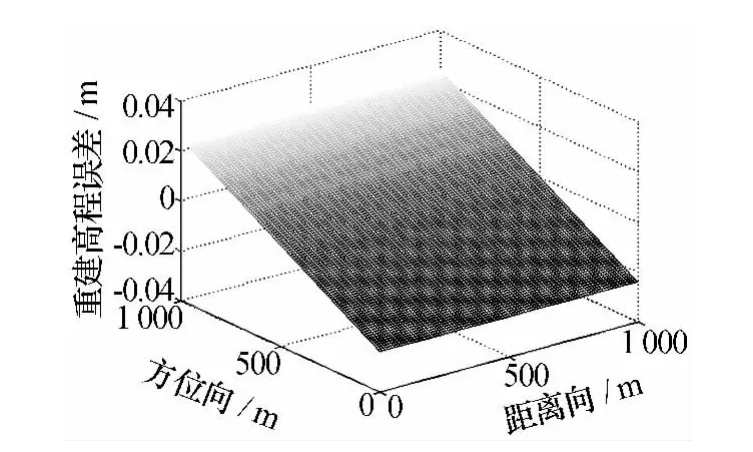
图10 平台(B2)复杂地形校准后高程误差
5 结束语
本文建立了干涉Cartwheel中各干涉平台参数误差和编队构形误差的关系,并将其引入联合敏感度方程,在不需要星间精确测量的基础上利用编队几何构形,实现多平台地形联合校准。它实现了空间位置信息和系统参数之间的自适应,得到较好的校准地形,但由于误差间的耦合,算法未能获取精确的系统参数信息,该问题的研究将在进一步的工作中展开。
[1]Massonnet D.Capabilities and limitations of the interferometric cartwheel[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(3):506-520.
[2]杨 磊,赵拥军,王志刚.基于估算垂直基线获得高程数据的方法[J].现代雷达,2006,28(1):52-54.Yang Lei,Zhao Yongjun,Wang Zhigang.Vertical baseline estimation-based method for obtaining digital elevation information[J].Modern Radar,2006,28(1):52-54.
[3]Goldstein R M,Zebker H A.Interferometric radar measurements of ocean surface currents[J].Nature,1987(328):707-709.
[4]Prati C,Rocca F.Improving slant-range resolution with multiple SAR surveys[J].IEEE Transactions on Aerospace and Electronic Systems,1993,29(1):135-143.
[5]Mallorqui J J,Bara M,Broquetas A.Calibration requirements for airborn SAR interferometry[C]//SAR Image A-nalysis,Modeling,and Techniques III.[S.l.]:SPIE Press,2000:267-278.
[6]Dall J.Corss-calibration of interferometric SAR data[J].IEE Proceedings Radar Sonar Navigaction,2003,150(3):177-183.
[7]郑 芳,马德宝,裴怀宁.InSAR中基线精度要求的探讨[J].现代雷达,2005,27(9):18-21.Zheng Fang,Ma Debao,Pei Huaining.Discussion about requirement of baseline precision in InSAR[J].Modern Radar,2005,27(9):18-21.
[8]Krieger G,Fiedler H,Mittermayer J,et al.Analysis of multistatic configurations for spaceborne SAR interferometry[J].IEE Proceedings Radar Sonar and Navigation,2003,150(3):87-96.
[9]Madsen S,Zebker H,Martin J.Topographic mapping using radar interferometry[J].IEEE Transactions on Geoscience and Remote Sensing,1993,31(1):246-256.
