抽水蓄能电站静止变频器转子位置检测
2014-10-26李国良李兴广李玉秋
赵 鑫,李国良,李兴广,李玉秋
抽水蓄能电站静止变频器转子位置检测
赵 鑫,李国良,李兴广,李玉秋
(哈尔滨电机厂有限责任公司, 哈尔滨 150040)
针对抽水蓄能电站静止变频器SFC设备控制系统的关键技术转子角测量展开研究。从基本电磁原理电动势与磁链的关系入手,应用磁链观测的方法求解转子角。通过分析纯积分方法存在的问题,提出了一种先补偿再低通滤波的替代方法,并仿真验证了此法的正确性。在实验平台上对数字控制器编程实现该算法,采样前端使用了硬件的二阶Butterworth低通滤波器,同时对引入的滞后采用软件补偿。分析了电枢绕组压降的影响,实测验证了角度计算的精度。利用转子位置角的测量值进行扇区判断,对逆变桥的晶闸管施加触发信号,驱动同步电机连续稳定地运转。
静止变频器SFC;转子角测量;磁链观测;低通滤波与补偿
0 前言
抽水蓄能电站能够调频调相、调峰填谷,对现代电网起着灵活的调控作用。静止变频器是大型抽水蓄能电站的关键设备,负担所有机组抽水工况下的启动任务。这种变频器属于自控式变频启动器。即它是根据转子的角度来控制与电机定子相连的逆变桥的晶闸管触发顺序的。只有实时知道转子精确位置才能确保电机以最大转矩向指定方向旋转。静止变频器早期一般采用位置传感器对转子位置进行检测,这就需要在电机主轴上附加额外的传感器,结构复杂不便于安装。目前引进的国外静止变频器如ABB、ALSTOM均采用无位置传感器,只需测量机端电压和电流就可以测得转子位置。本文对静止变频器无位置检测技术进行了研究,提出的转子位置检测算法可以应用在机组启动低频至额定频率的整个阶段,仿真和小功率电机实验均验证了其有效性。
1 磁链求解转子角基本原理

以上通过纯积分求磁链的方法叫做电压模型磁链观测器[2]。
2 转子角计算方法
2.1 纯积分方法存在的问题
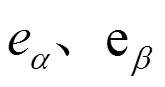
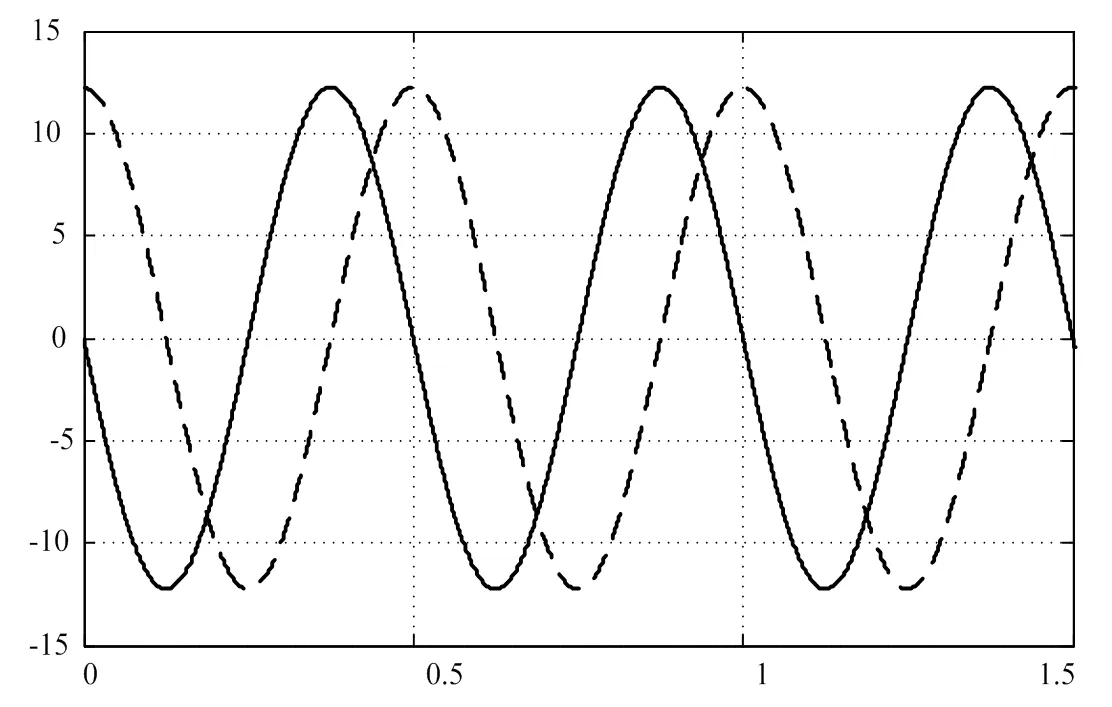
图1 3/2变换后的
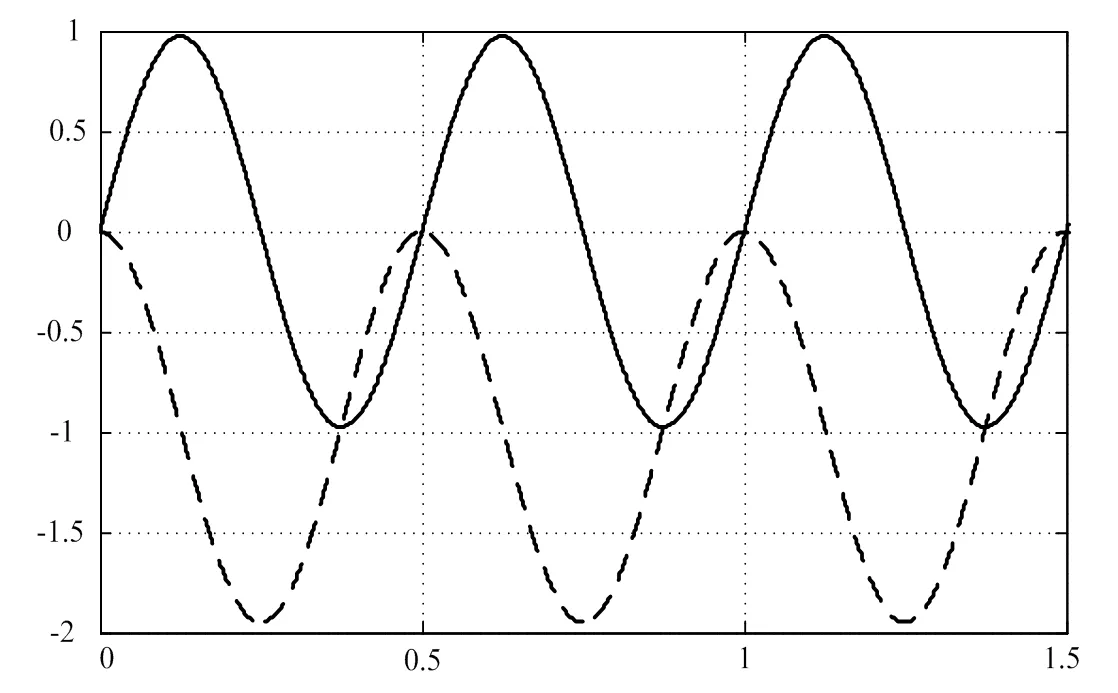
图2 纯积分后的
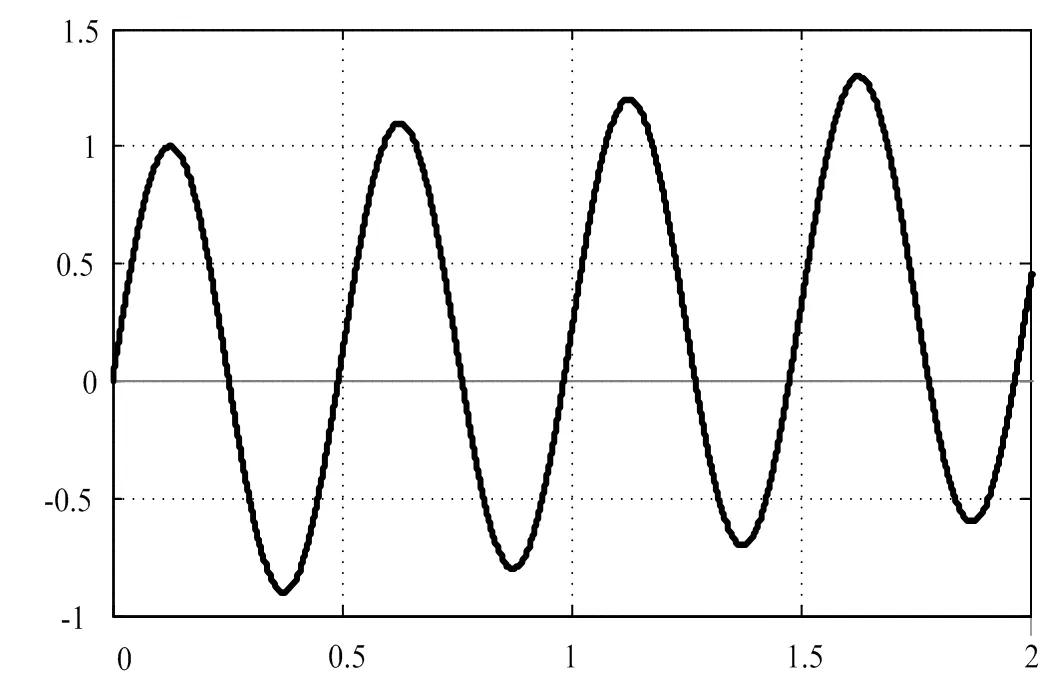
图3 直流偏置带来的积分上扬
2.2 低通滤波器方法
2.3 补偿公式
当输入信号频率接近或低于低通滤波器的截止频率时,利用低通滤波器估算得到的定子磁链存在较大的幅值和相位误差,这些估计误差会使转子角计算有误,导致扇区判断失误。为得到更精确的结果需对低通滤波后的结果进行幅值和相位补偿,其补偿原理如下:

根据式(3)和(4)可得到:

将磁链向量分别向和轴投影,利用三角函数两角和公式,可以推得下式[3]:

式(9)(10)即为低通滤波器的相位和幅值补偿计算公式。
2.4 新型改进低通滤波器
交换低通环节和补偿环节的计算顺序,先补偿再滤波方法的磁链矢量差分方程为:


2.5 反电势e的求解

2.6 对硬件滤波的补偿
由于SFC通过相控整流的方法输出直流电,再经平波电抗器给逆变桥供电,机端电压输出波形势必引入6脉波300Hz的叠加成分。故我们选用由运算放大器搭建的二阶Butterworth低通滤波电路将其滤除[4]。而使用Butterworth滤波器必然引入相位滞后,我们关心的就是相位采样计算结果,所以必须在软件中将相位加以补偿。根据滤波电路推导出其传递函数,再求其相频响应为:
3 仿真分析
4 实验及其结果
4.1 实验方法

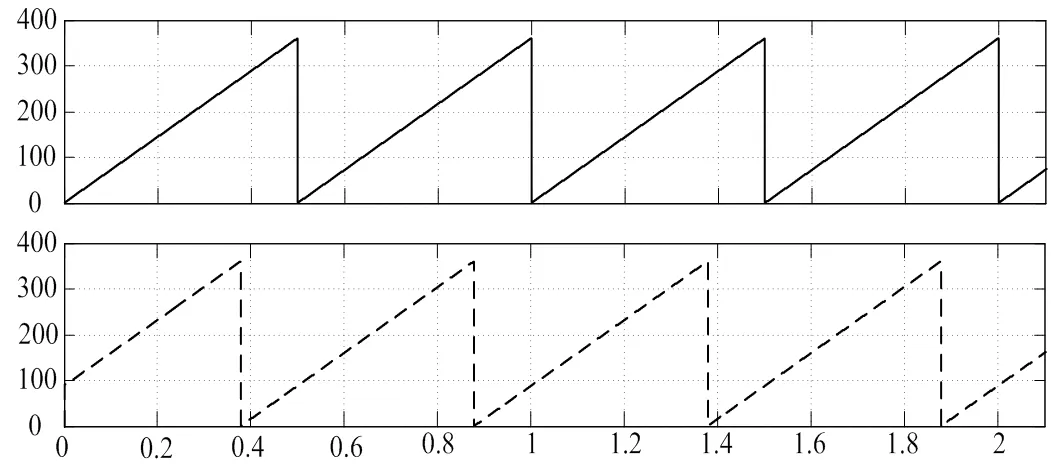
图6 纯积分与仅低通滤波算法比较
4.2 滤波
在机端电压采样电路后添加的硬件滤波电路,如图7所示。
滤波效果如图8、图9所示。
4.3 运行结果分析
机端反电势理论上应为正弦波,但在电枢绕组电阻的影响下,实测的机端电压在换相时刻有明显的突变。机端电压经滤波补偿后就可以应用本文第二部分介绍的转子角计算方法了。数字控制器逻辑分析仪显示了考虑电阻压降前后的对比。如图10,可见补偿后的电压波形较补偿前的电压波形有很大改善。由于还存在漏磁感应电动势及逆变桥通电电压的影响,波形还不够平滑。
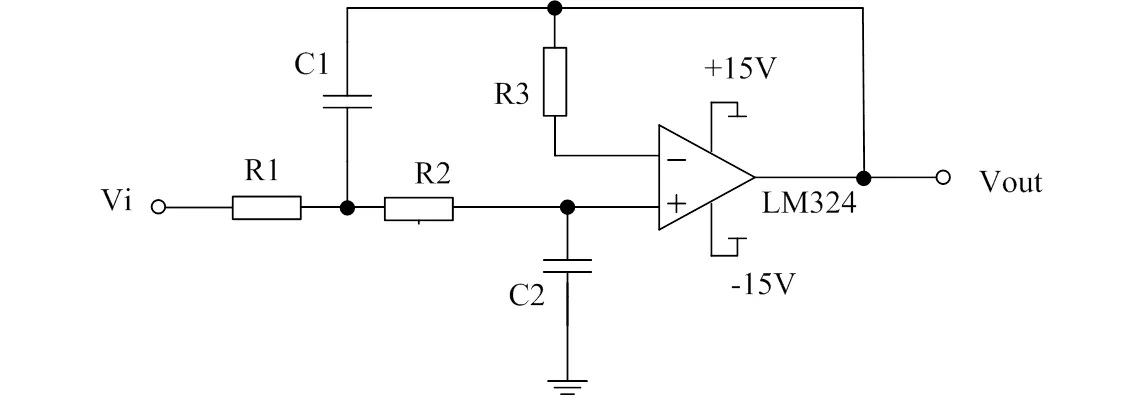
图7 二阶巴特沃斯滤波器电路

图8 滤波之前的一相机端电压波形

图9 滤波之后的一相机端电压波形
将转子固定在某一特定位置,突加励磁,控制器自动开始计算转子位置,并将实验数据记录见表1。可以看出,在同步电机静止时突加励磁算得转子初始位置单次误差小于1.5°,这表明转子位置算法能够准确计算出转子的初始位置,计算精度较高,能够满足静止变频器对转子位置的计算要求。
在电机转轴上安装绝对式光电编码器直接测量转子位置角,同时开启本算法进行转子角计算,将两路输出信号采集到数字控制器的逻辑分析仪上,如图11所示,可见应用本无位置传感器转子位置检测方法与用测角编码器测量出来的转子角度几乎一致。
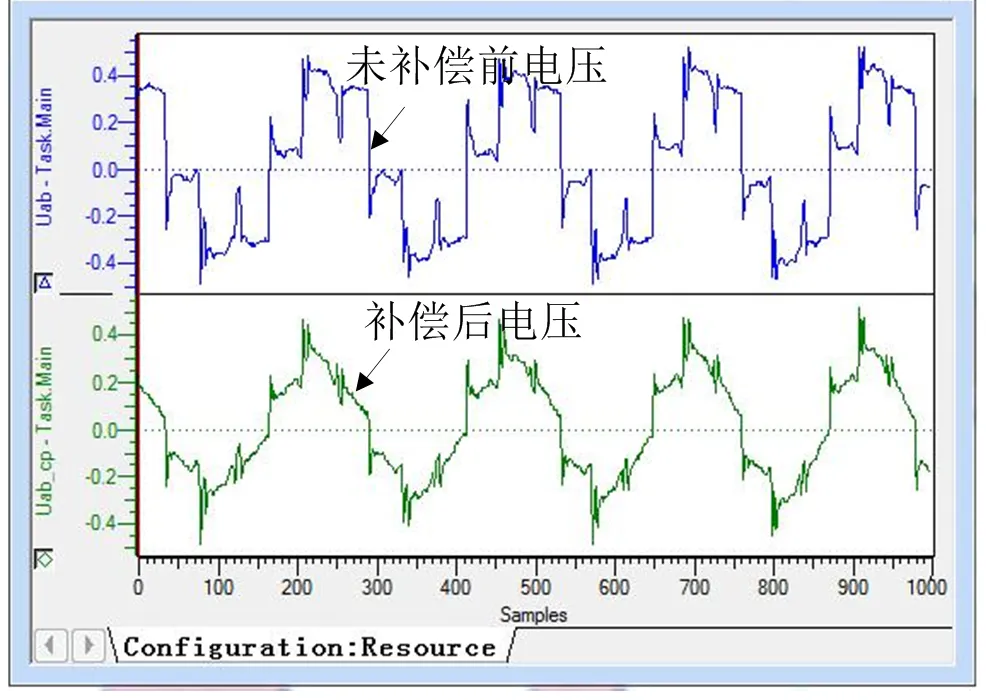
图10 电阻压降的补偿

表1 转子位置算法验证数据记录

图11 转子角测量结果比较
图12是使用本文提出的转子位置角检测方法,静止变频器拖动电机运行到8Hz时,滤波后的机端三相电压波形。可见电机运行得十分稳定。
5 结语
本文使用无机械位置传感器的方法,利用霍尔元件测量电压电流间接计算转子位置。该算法所依据磁链观测原理的理论依据充分,数学计算公式简单,易于在数字控制器上编程实现。通过实验将其应用在静止变频器逆变桥的触发控制策略上,证明了这种转子位置角检测方法的实用性和有效性。
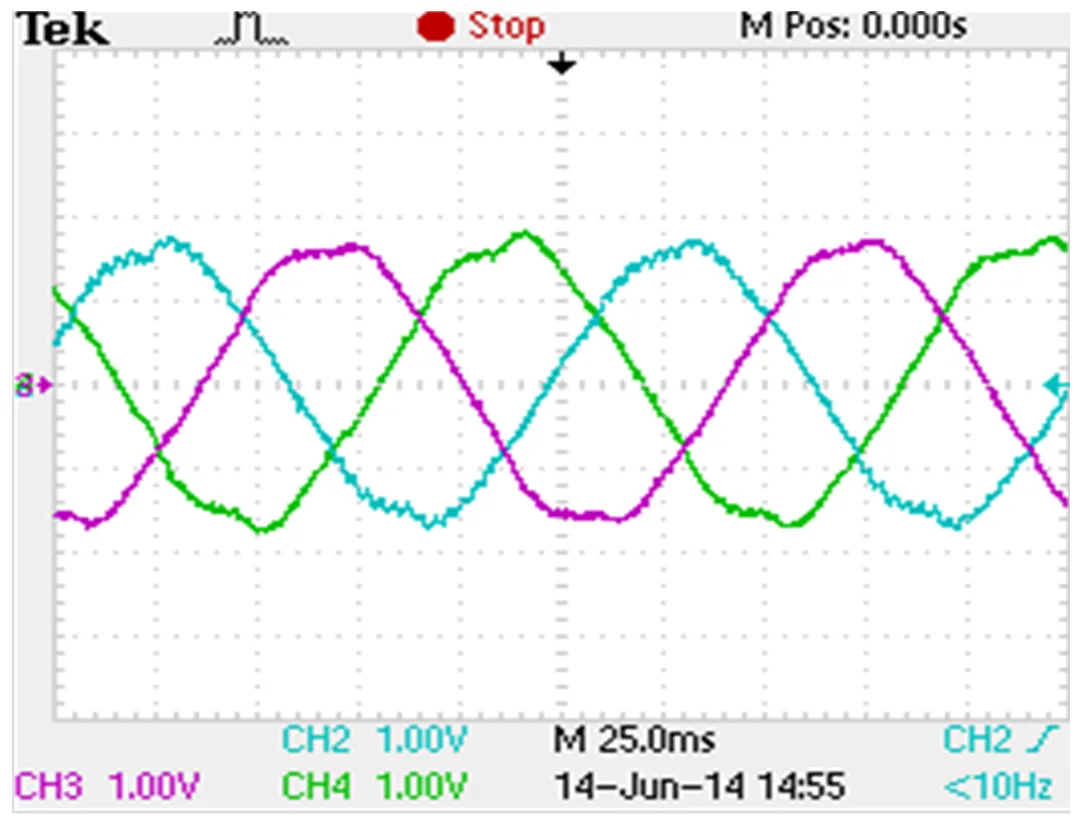
图12 8Hz时机端电压波形
[1] 李崇坚. 交流同步电机调速系统[M]. 北京: 科学出版社, 2006: 312-338.
[2] 丁荣军, 黄济荣.现代变流技术与电气传动[M].北京: 科学出版社, 2009: 218-219.
[3] 何志明. 基于新型定子磁链观测器的无传感器直接转矩控制系统研究[D]. 重庆大学博士学位论文, 2009: 19-20.
[4] 李钟慎. 高阶Butterworth低通滤波电路的快速设计[J]. 工业仪表与自动化装置, 2007, 4: 27-29.
[5] Comanescu.M, Xu. L. An improved flux observer based on PLL frequency estimator for sensorless vector control of induction motors[J]. IEEE Transactions on Industrial Electronics, Dec. 2005, 53(1): 50-56.
[6] Lascu C, Boldea I, Blaabjerg F. Comparative study of adaptive and inherently sensorless observers for variable-speed induction-motor drives[J]. IEEE Transactions on Industrial Electronics, 2005, 53(1):57-65.
[7] Zerbo M, Sicard P, Ba-Razzouk A. Accurate adaptive integration algorithms for induction machine drive over a wide speed range[C]. Proceedings of IEEE international conference on Electric Machines and Drives, San Antonio USA 2005: 36-41.
[8] Chihiro Hasegawa, Shoji Nishikata. A sensorless rotor position detecting method for self-controlled synchronous motors[C]. International Conference on Electrical Machines and Systems (ICEMS), 2008: 1017-1021.
[9] Wang Deshun. Developing and Simulation Research of the Control Model and Control Strategy of Static Frequency Converter[J]. IEEE Transactions on Industrial Application, 2012, 19(2): 217-222.
[10] HU Jun, WU Bin. New integration algorithms for estimating motor flux over a wide speed range[J]. IEEE Transactions on power Electronics, 1998, 13(5): 96-97.
[11] Idris NRN, Yatim AHM. An improved stator flux estimation in steady-state operation for direct torque control of induction machines[J]. IEEE Transactions on Industry Applications, 2002, 38(1): 110-116.
Rotor Position Detection of Static Frequency Converter of Pumped Storage Power Plant
ZHAO Xin, LI Guoliang, LI Xingguang, LI Yuqiu
(Harbin Electric Machinery Company Limited, Harbin 150040, China)
Aiming at static frequency converter SFC key technology of pumped storage power plant rotor angle measurement, had in-depth discussion. From basic electromagnetic principle the relationshipof electromotive force and flux, used flux observation to obtain rotor angle. By means of analyzing the problem of pure integral, proposed a alternative solution of compensation first Lowpass filtering later, proving the correctness through simulation. On the experimental platform digital controller, programming and achieving the arithmetic. At the part of sampling, used hardware second order Butterworth Lowpass filter, applied soft compensation on the imported lag at the same time, analyzed the influence of armature winding voltage reducing, tested and verified the accuracy of angle calculation with experiments. Used the measurement value of rotor angle to judge the fan section, triggered the thyristor of inverter, driving the synchronous machine rotating stably and continuously.
static frequency converter SFC; rotor angle measurement; flux observation; LPF and compensation
TM344.6
A
1000-3983(2014)06-0070-06
2014-05-17
国家科技支撑计划项目:大型抽水蓄能机组控制系统装置及系统集成技术研发(2011BAF03B03)
赵鑫(1980-),2006年毕业于武汉理工大学控制理论与控制工程专业,硕士,现从事变频器设计,助理工程师。

审稿人:朴秀日