一种新的热红外影像边缘检测方法
2014-10-25张振鑫王跃宾崔言辉陈亚凯
张振鑫,夏 清,王跃宾,崔言辉,陈亚凯
(1.北京师范大学地理学与遥感科学学院遥感科学国家重点实验室,北京100875;2.中国矿业大学(北京)地球科学与测绘工程学院北京,100083;3.北京师范大学资源学院,北京100875)
1 引言
近年来,由于利用热红外影像进行温度探测具有高灵敏度、测温快速、温度精确的特点,因而它被广泛地应用在遥感监测、无损探测、电力工业等领域中[1]。边缘含有影像的重要信息,因此,边缘检测是图像处理领域中的热点问题之一。传统的边缘检测方法有很多[2]。近些年,又新兴出了基于数学形态学、模糊聚类以及遗传算法等的边缘检测算法[3]。由于热红外影像因其自身特点,边缘具有极大的不确定性。利用传统的经典算法不能很好地将感兴趣的目标物体边缘提取出来,一些细节特征更无法识别。针对上述问题,本文基于模糊理论,提出一种将多层次模糊增强、模糊C均值聚类与经典算法Sobel相结合的边缘检测方法,实验仿真模拟证明,该方法能很好地提取感兴趣温度目标区的边缘,同时,细节特征表现较好。
2 基本算法概述
2.1多层次模糊增强
模糊增强是针对影像中边缘的模糊性,将待处理的影像利用映射变换从空间域转变为模糊特征域,在模糊特征域内进行增强,然后再将影像从模糊特征域经逆映射转为空间域,完成影像的增强处理[4-5]。经过模糊增强后,不仅增强边缘两侧的对比度,而且降低边缘的模糊性及不确定性。通常情况下,针对影像中不同灰度等级层次的边缘感兴趣,因此采用多层次模糊增强算法来增强图像。
2.2 模糊C均值聚类
模糊C均值聚类(FCM)算法是根据计算样本点与聚类中心之间的相似性测度,对二次目标函数进行迭代优化,将样本点的数据集划分为若干类。目标函数定义为[6]:

其中,n为像素点数;c为聚类中心点数;uik为像素点 xk对第 i类的隶属度;V= {v1,v2,…,vc}是聚类中心点集;U= { uik},m∈[1,+∞)为加权指数(xk-vi)=是欧氏距离。
2.3 Sobel算法
经典的Sobel算子能提取出光滑、连续的影像边缘,同时对噪声具有较好的平滑作用,边缘信息定位准确,能产生较好的检测效果,其水平和竖直方向模板如下:
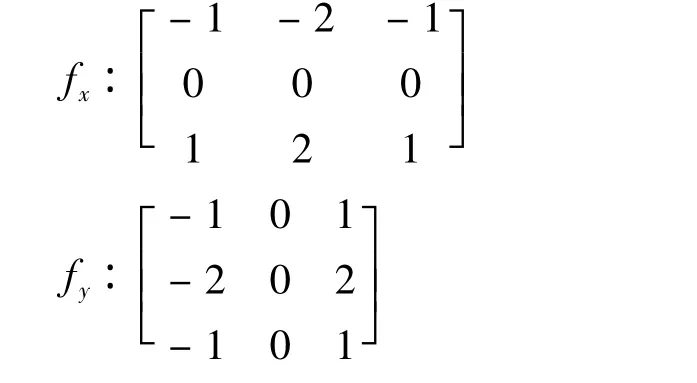
采用上述模板对影像做卷积运算,从而提取影像的边缘信息[2]。
3 本文的改进算法及结果分析
3.1 本文的改进算法
红外热像仪获取的热红外影像具有区别于常规影像的特性,热红外影像中每个像素点的伪彩色值与该点的红外辐射能量一一对应,表达了该像素点的温度信息。同时,还能够获取相应的可见光影像。但是,热红外影像中高、低温区的过渡带像素较多,边缘分界处较模糊,导致了影像中的边缘信息具有很大的不确定性,不能很好的描述感兴趣目标的清晰轮廓。在热红外影像的解译过程中,人们通常对某类物体或某个区域感兴趣,而这类区域边界具有大致相同的灰度级或灰度级分布在某一特定范围内。因此,在对影像进行边缘提取之前,增强感兴趣目标边缘的对比度、抑制非目标影像的对比度来达到增强目标物体的目的是很有必要的。本文在2.1节的基础上,引入多层次梯形模糊增强算法[7]对热红外影像X进行预处理,梯形模糊映射变换如下:

完成模糊映射后,利用对比度增强算子进行增强,r次增强算子为:

f(i,j)max和 f(i,j)min为热红外影像的最大、最小灰度级;p'ij是 pij经 r次增强后的结果;f(i,j)b和 f(i,j)a是影像中感兴趣目标区的准最大、最小灰度级,pc∈[0,1]。
然后,进行模糊映射的逆变换:

最后得到增强后的影像。
上述式中,f(i,j)b和 f(i,j)a是根据现实的需要划定影像中感兴趣区域的准最大、最小灰度级,其值是在热红外影像中手动拾取的,由于感兴趣目标区域的灰度级归属于一定的范围内,拾取的像素值不要求精确,落在归属的灰度级范围内即可。在式(2)中可以看出,将热红外影像温度值的像素级以感兴趣的目标边缘为界分为三部分,即低于f(i,j)a的区域、感兴趣边缘区域、高于f(i,j)b的区域。可以看出,采用梯形模糊增强是在低于f(i,j)a的区域采用上升型变换,在高于 f(i,j)b的区域采用下降型变换,而感兴趣的温度目标区赋为最大值1。pc值的确定可根据实际情况,通过估计获取的准最大、最小值分别在多大程度上代表实际感兴趣目标区域的最大、最小值来灵活设置。在多层次模糊增强时,每一次增强可根据不同的感兴趣温度区的边缘灰度级来设置 f(i,j)b、f(i,j)a和pc的值。通过上述的多层次模糊增强预处理,既可增强实际应用中人们感兴趣温度区的边缘信息,又不致使较多的背景信息误判为感兴趣区域,去除不必要的冗余信息。
将经过多层次梯形模糊增强的热红外影像X采用2.1节所述的模糊 C均值聚类算法,将其分为三类:高于 f(i,j)b的类、低于 f(i,j)a的类及感兴趣温度区。然后提取出感兴趣的温度区,赋值为二值影像,感兴趣的区域赋值为1(白色),其他区域赋值为0(黑色)。最后,利用经典的Sobel算法对提取出的感兴趣温度区进行边缘检测。
3.2 仿真实验及结果分析
本文采用的是日本进口非制冷焦平面红外热像仪,型号为TH9100MV/WV所获取的热红外影像。热红外影像像素为320(H)×240(V),可见光影像为640(H)×480(V),可测温度范围为-40~120℃。利用的热红外影像是电路元件的一个组成部分,实际操作环境温度是29℃,环境湿度是60%左右,热红外影像的温度范围为26.9~107.6℃,将影像导入到仪器配套的处理软件MikroSpec4中,拾取第一次多层次梯形模糊增强的感兴趣温度区边缘的灰度级 f(i,j)a=90,f(i,j)b=160,同时设定pc=0.8;拾取第二次多层次模糊增强的灰度级 f(i,j)a=65,f(i,j)b=80,基于MATLAB进行仿真实验,结果如图1所示,对比性能指标如表1所示。
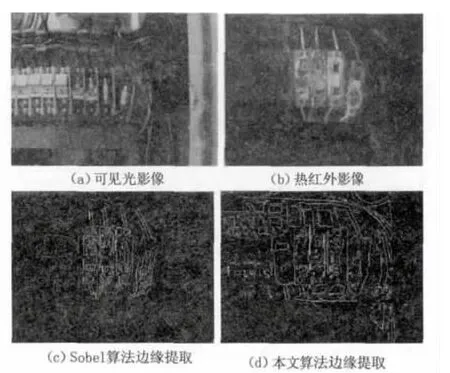
图1 仿真结果
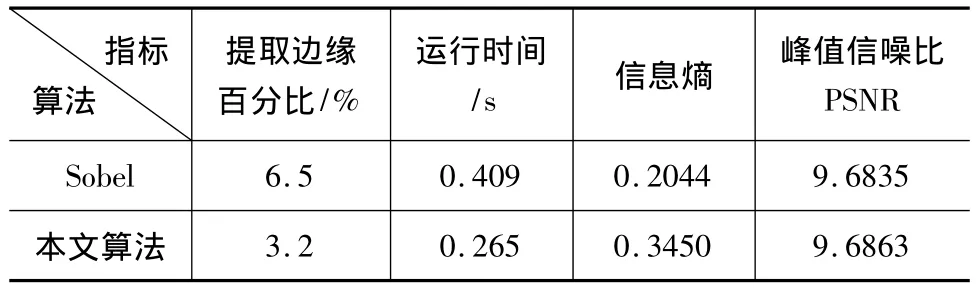
表1 仿真结果性能指标对比表
从图1及表1,可以看出:①利用Sobel算法检测边缘,虽然能检测出物体的大致轮廓,但是边缘轮廓不连续,不能够体现目标物体的外部轮廓,定位不精确;而利用本文算法检测的边缘,外部轮廓连续性较好且清晰,基本描述了目标物体的形态,提取边缘百分比比传统Sobel算法高3.3%,定位精度较好。②峰值信噪比是描述提取的边缘影像失真程度的大小,值越大说明失真度越小。传统的Sobel算法检测出的边缘有些较粗,而本文算法检测出的边缘大部分是单像素的,边缘较细,与原始影像的边缘真实程度更接近,边缘表现特征较好。③Sobel算法只检测出了部分物体的边缘信息,遗漏了其他物体的边缘;而本文算法不仅能检测出Sobel算法检测出的边缘,同时能检测出Sobel算法遗漏的其他细节边缘,从信息熵值指标也可看出,熵值越大,说明图像所包含的平均信息量越多,图像信息越富集,从而轮廓也越清晰。④由于本文算法是先通过多层次模糊增强,将感兴趣温度区从背景中分离出的,去除不必要的冗余信息,对比Sobel算法与本文算法的运行时间,可见本文算法在一定程度上减小了计算量与运行时间,取得了良好的边缘检测效果。
4 结论
本文针对热红外影像的特点,提出了一种先对影像进行多层次梯形模糊增强,然后再将模糊C均值聚类与Sobel算法相结合的边缘检测方法。结果表明:该算法在一定程度上减小了热红外影像边缘检测的模糊性及不确定性,检测的边缘轮廓连续且清晰,边缘定位精确,同时能检测出传统Sobel算法所不能检测出的信息,边缘提取信息量大,是一种检测效果较好的方法。
[1] SUN Xiaogang,LI Yunhong.Review of the development of temperature measurement technology with infrared thermal imager[J].Laser & Infrared,2008,32(8):101 - 104.(in Chinese)孙晓刚,李云红.红外热像仪测温技术发展综述[J].激光与红外,2008,32(8):101 -104.
[2] XIA Qing,ZHANG Zhenxin,WANG Tingting.Edge extraction algorithm of infrared thermal image based on improved sobel operator[J].Laser & Infrared,2012,2013,43(10):1158 -1161.(in Chinese)夏清,张振鑫,王婷婷,等.基于改进Sobel算子的红外图像边缘提取算法[J].激光与红外,2013,43(10):1158-1161.
[3] CHEN Yihu.Summary of image edge detection[J].Journal of Baoji University of Arts and Science(Natural Science),2013,33(1):16 -21.(in Chinese)陈一虎.图像边缘检测方法综述[J].宝鸡文理学院学报:自然科学版,2013,33(1):16 -21.
[4] LI Gang.Digital imang processing methods based on fuzzy enhancement[D].Wuhan:Wuhan University of Technology,2005.(in Chinese)李刚.数字图像的模糊增强方法[D].武汉:武汉理工大学,2005.
[5] CHEN Xiangtao,CHEN Yujuan,LI Mingliang.Applied research of improved multi-level fuzzy enhancement algorithm[J].Computer Engineering and Applications,2010,46(30):195 -198.(in Chinese)陈湘涛,陈玉娟,李明亮.改进的多层次模糊增强算法应用研究[J].计算机工程与应用,2010,46(30):195-198.
[6] WANG Guolin,ZHOU Shuren,LI Junqiang.Feature extraction of tire section based on fuzzy clustering and morphology[J].Journal of Jiangsu University:Natural Science Edition,2012,33(5):513 -517.(in Chinese)王国林,周树仁,李军强.基于模糊聚类和形态学的轮胎断面特征提取[J].江苏大学学报:自然科学版,2012,33(5):513 -517.
[7] XIONG Xinghua,LI Xintao.An object_oriented fuzzy enhancement for remote sensing images[J].Geomatics and Information Science of Wuhan University,2002,27(5):516 -521.(in Chinese)熊兴华,李新涛.面向对象的遥感影像模糊增强[J].武汉大学学报:信息科学版,2002,27(5):516-521.