基于激光雷达的水平测量技术研究
2014-10-25何秉高安志勇
何秉高,安志勇
(1.长春理工大学光电工程学院,吉林长春130022;2.长春大学电子信息工程学院,吉林长春130022)
1 引言
随着科学技术与飞机制造业的飞速发展,传统的飞机水平测量方法已经无法适应目前飞机设计和制造的发展趋势。数字化水平测量技术以其高精度、高效率、数据处理工作量小等优势慢慢发展起来并日益成熟[1-3]。研究基于激光雷达原理的飞机水平测量技术具有明显的技术优势。采用激光雷达技术进行水平测量比以往使用电子经纬仪的精度更高,材料受限的影响更小,并且还可以用其进行逆向工程设计,做到一机多用,这是以往测量技术所不具备的,其应用前景广阔,市场利润可观,对形成产业极具诱惑力。
2 测量原理
激光雷达是以激光作为载波,工作时,由发射系统发送一个信号,经目标反射后被接收系统收集,通过测量激光信号往返传播的时间而确定目标的距离。这种方法关键在于精确地测量信号往返传播的时间ΔT。该系统采用了相对测量的技术方法,用光纤作为标准长度与被测距离比较进行测量。如图1所示,红外激光器发出的光线被分成两束,一束直接到达被测表面,并被反射,传输时间为T目标;另一束传入已知固定长度的光纤内,输出时间为T光纤,两束光信号被汇合比较后输出一个混频信号,得到ΔT=T目标- T光纤。

图1 激光雷达测量原理Fig.1 Measurement principle of laser radar
ΔT的获得如图2所示,图中,实线代表发射信号,虚线代表返回信号,发射信号和接收信号间的频率差“ΔF”与发射信号和接收信号间的时间差“ΔT”是直接相关的,通过测量可得到频率差ΔF的值,由ΔF可推导出时间差ΔT,由ΔL=C×ΔT,得到被测距离与标准光纤的长度差值ΔL。被测距离由公式2L=L标+ΔL获得。当ΔT=0时,被测距离L等于固定光纤长度L标的一半。
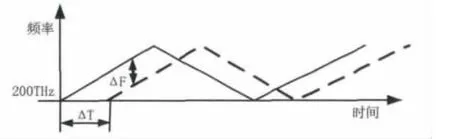
图2 ΔT与ΔF的关系图Fig.2 Relationship betweenΔT and ΔF
激光雷达进行测量工作时的一项主要工作内容是采集物体的空间位置信息。通过激光探测采集到的信息是被测物体到测量系统的距离数据,装在水平轴和垂直轴的两个轴角编码器给出光轴的空间指向,可以得到目标的方位角和俯仰角。激光雷达使用仪器自己定义的坐标系统:X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,如图3所示。
由此可得到被测点三维坐标的计算公式:

式中,P为空间距离;θ为P与XY平面的夹角;α为P在XY平面的投影距离与X方向的夹角。根据计算公式(1),最终得到了在以激光雷达位置为原点的相对坐标系中的三维坐标。
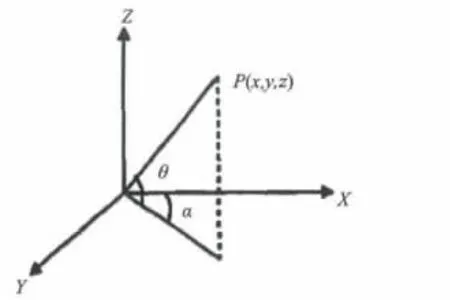
图3 坐标测量原理Fig.3 Measurement principle of coordinate
3 测量方案设计
本方案使用激光雷达作为测量设备并采用软件方法来实现水平(特征点)测量。通过高分辨率CCD摄像器件捕捉被测特征点,在软件操作界面上,通过图像处理,产生电十字分划线,来确定被测点的中心[4-7];再通过自主研制的软件,在电脑操作界面上产生电十字分划线,该十字分划线可以自动捕捉SA软件上自带CCD摄像界面中指示光斑的中心(即光斑能量中心),使二者十字分划线重合,即可准确将被测点中心与激光雷达指示光斑中心重合,完成测量,如图4所示。
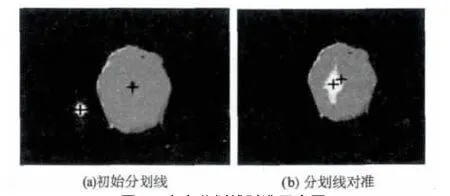
图4 十字分划线对准示意图Fig.4 Alignment with the crosshair
为了减少转站次数,提高测量的精度和测量效率,激光雷达测量系统采用升降装置,使其以支架方式位于飞机上方作为制定测量计划的基本出发点。由于激光雷达的仰角范围为±45°,所测量的飞机的高度约为3 m,激光雷达的测量中心到底座的距离1617 mm,故使激光雷达测量系统到飞机的水平距离约为3 m,垂直距离约为1.5 m,如图5所示。
测量时,先完成单侧基准点2 、5 、9 、15、20、36、38(作为转站公共点)的测量,如图6所示,再测量其他各点,完成对此方向被测特征点的测量。之后进行转站,先完成转站公共点的测量,再进行其他各点的测量并保存测量数据,如图7所示。

图5 整体布局示意图Fig.5 Schematic diagram of whole layout
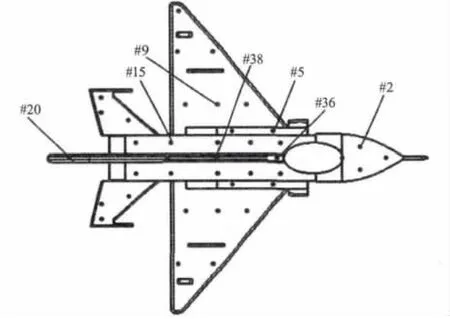
图6 被测飞机单侧基准点示意图Fig.6 Locations of aircraft benchmark unilateral points

图7 被测飞机特征点示意图Fig.7 Locations of aircraft benchmark points
4 转站数学模型的建立
在进行测量数据分析时,首先对不同转站条件下的测量点进行坐标值统一变换,解决这个问题可借助公共基准点坐标统一变换的数学模型。
如图8所示,设激光雷达测量系统位于0#位置时的坐标为O0(X0,Y0,Z0),它的坐标单位矢量为(珒i0,珒j0,珒k0),系统记录下测量值,B、C、D为公共基准点。之后,移动测量系统到1#位置处,此时它的坐标为 O1(X1,Y1,Z1),它的坐标单位矢量为(珒i1,珒j1,珒k1)[8]。
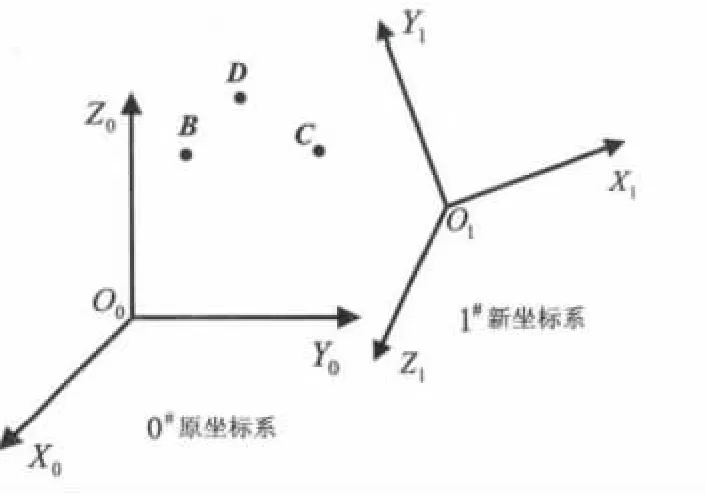
图8 坐标原理变换示意图Fig.8 Principle of coordinate transformation

式中,A=转换矩阵A中的元素aij是两个坐标系中坐标轴单位矢量之间关系的待定参量。
设公共基准点B、C、D在0#坐标系下的坐标为B0(xb0,yb0,zb0)、C0(xc0,yc0,zc0)、D0(xd0,yd0,zd0),在1#坐标系下坐标为 B1(xb1,yb1,zb1)、C1(xc1,yc1,zc1)、D1(xd1,yd1,zd1),将它们带入公式(2)中并联立可得:

5 测量数据分析
使用转站测量法进行坐标统一变换后,统计所有测量点的坐标值,并在SA软件上生成点云数据,再导入被测飞机的三维实体模型(如图9所示),之后进行数模拟合,使被测点三维坐标数值与实体模型特征点的理论坐标值进行比较,最终产生比较结果并进行误差分析(如图10所示)。

图9 被测飞机三维模型Fig.9 3D model of the aircraft
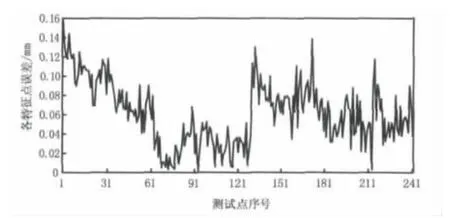
图10 水平测量各点误差Fig.10 Errors of horizontal measure
由图10中的测量数据综合分析可知,测量误差的主要来源为系统测量误差((10mm+2.5 mm)/m)和转站误差(8 mm);由公式各特征点合成的总误差均小于给定的综合测量误差0.5 mm,符合测量精度指标要求。
6 结束语
本文融合了多种应用技术,提出一种基于激光雷达的水平点测量方案。首先对激光雷达测量系统进行了原理分析,并基于此原理进行了水平测量方案总体设计,然后针对方案中涉及的CCD图像处理及转站测量技术进行了阐述,最后对测量数据进行了分析。经实际检测,各特征点合成的总误差均小于给定的综合测量误差0.5 mm,满足方案测量精度指标要求。
[1] ZHAO Yuan,XU Yuannan,et al.Theoretical analysis on range accuracy of gain - modulated Scannerless lidar[J].Infrared and Laser Engineering,2009,38(2):313 -317.(in Chinese)赵远,许元男,等.增益调制非扫描激光雷达测距精度的理论分析[J].红外与激光工程,2009,38(2):313-317.
[2] H W Kugel,D Loesser,A L Roquemore.Precision metrology of NSTX surfaces using coherent laser radar ranging[J].Review of Scientific Instruments,2001,72(1):1132-1138.
[3] Madhavan Menon,Anthony Slotwinski.Novel doppler laser radar for diagnostics in fusion reactors[J].Review of Scientific Instruments,2004,(75):10 -15.
[4] LIANG Wei,ZHU Yu.Connected area detection of binary image based on line segment table[J].Journal of Computer Research and Development,2007,(4):1157 - 1160.(in Chinese)梁炜,朱煜.基于线段表的二值图像连通区域检测[J].计算机技术与应用进展,2007,(4):1157 -1160.
[5] LI Junshan,YANG Wei,ZHANG Xiongmei.Infrared image processing,analysis and fusion[M].Beijing:Science Press,2009.(in Chinese)李俊山,杨威,张雄美.红外图像处理、分析与融合[M].北京:科学出版社,2009.
[6] ZHANG Yu,et al.Method of infrared and visible image fusion based on mutifealures[J].Laser & Infrared,2008,38(12):1262 -1265.(in ahinese)张宇,等.基于多特征的红外与可见光图像融合方法的研究[J].激光与红外,2008,38(12):1262 -1265.
[7] Conzalez.Digital image processing[M].Beijing:Publishing House of Electronics Industry,2011.(in Chinese)冈萨雷斯.数字图像处理[M].北京:电子工业出版社,2011.
[8] ZHOU Xun,ZHAOFengxiu,ZHAO Haishan.Measurenent technology for the artillery components defoimation based on coordnate conversion prnciple of leap - frog ball[J].Vehicle& Power Technology,2008(1):1 -4.(in Chinese)周珣,赵凤修,赵海山.基于蛙跳式坐标变换原理的火炮零部件变形量测量技术[J].车辆与动力技术,2008(1):1-4.