激光点云实现探地雷达图像地形校正的研究
2014-10-25任丽丽李家存钟若飞曾凡洋
任丽丽,李家存,张 迪,钟若飞,曾凡洋
(首都师范大学资源环境与旅游学院三维信息获取与应用教育部重点实验室,北京100048)
1 引言
探地雷达作为一种新型的无损探测工具,由于操作简单及较好的分辨率,被广泛应用于近地表下目标物或介质层的探测。探地雷达获取的图像为水平方向和竖直方向成比例的二维灰度图,当地形比较平坦时,探地雷达图像可以将真实的地下构造反映出来。但在实际野外探测中,经常会遇到地形起伏变化的情况。由于地形变化影响及图像显示软件的限制,获取的雷达图像无法将地下界面中的真实形态反映出来,从而影响到图像的解译和目标物的精确定位。因此,需对探地雷达图像做地形校正处理[1]。
地形校正的过程,即探地雷达图像与地形数据匹配的过程。对于地形数据的获取,目前多采用激光水平仪[2]、全站仪[3]、GPS 和 DGPS[4]、倾角仪和里程计[5]等传统的测量方法实现。这些传统测量方法存在着数据采集工作量大,地形数据和探地雷达图像匹配易受人为因素干扰等缺点。本文结合新型的激光测绘技术,提出一种采用激光点云实现探地雷达图像地形校正的方法。与传统测量方法相比,激光扫描技术可以快速、高效地获取地形数据,通过测量线上均匀分布的离散点可以快速实现探地雷达图像与地形数据的精确匹配,从而实现对探地雷达图像的地形校正。
2 探地雷达图像的地形校正
探地雷达地形校正的方法借鉴地震波静校正的思想,基本原理是将探地雷达各道数据的双程传播时间统一校正到距空气-大地交界面上方一定距离处的一个水平基准面上,这个基准参考面通常为测量线的最高或者最低点所在的水平面[6]。图1为探地雷达在地形起伏情况下采集数据,假设地面下某深度处存在均匀水平分布的介质层。探地雷达获取的二维时间剖面如图2(a)所示,由于地形不断起伏变化,电磁波在介质中的传播时间发生变化,从而导致探地雷达图像上水平分布的介质层发生扭曲。根据时间移位原理,选择地形最高点所在的水平面为参考面,将探地雷达在高程上的传播时间都校正到这一参考平面上。运用公式(1)结合线性插值的方法可计算出探地雷达每道数据相对于基准参考面的时间差,然后对探地雷达图像进行校正,校正后的时间剖面如图2(b)所示,探地雷达图像与真实的地形变化相一致。

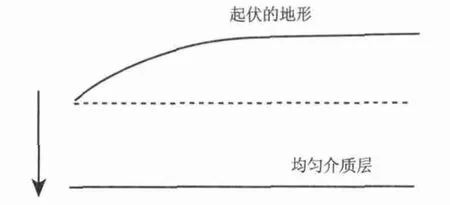
图1 探地雷达在起伏地形下采集数据
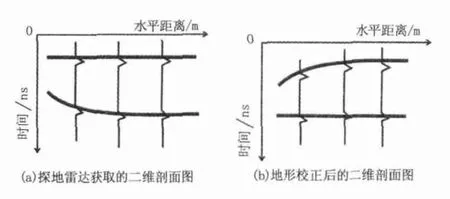
图2 地形校正前后的二维时间剖面
3 方法
3.1 激光彩色点云
测量区的地形数据是由车载激光扫描系统获取的,该系统主要由360°激光扫描仪、组合导航系统(IMU/GPS)和全景相机等传感器组成[7]。激光扫描仪获取空间物体表面的距离、角度和强度信息;组合导航系统记录载体实时的位置和姿态信息;全景相机获取空间物体的彩色纹理信息。激光点云数据本身是没有彩色纹理信息的,这样就很难提取地面上对应的标识点坐标信息。因此要对激光点云数据进行赋相机彩色纹理处理,以便实现标识点坐标信息的提取。
根据曝光时刻全景相机中心、全景球面上像点、物点三点共线的原理,通过一系列的坐标转换,实现全景影像与对应的点云匹配,使激光点云赋上彩色纹理[8]。其步骤如下:首先将在大地坐标系下的激光数据转换到以全景球心为中心坐标系下:
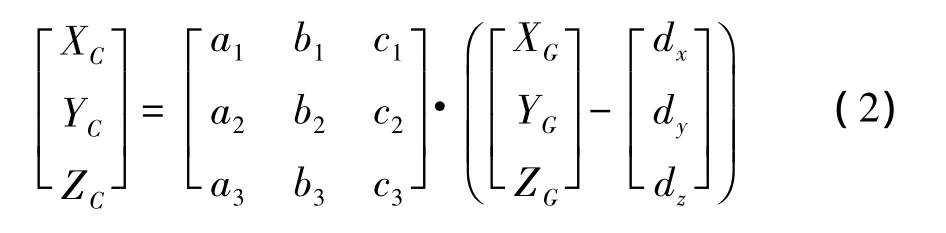
其中,(XG,YG,ZG)为大地坐标系下的坐标;(dx,dy,dz)为当前全景球球心的大地坐标;(a1,b1,c1,a2,b2,c2,a3,b3,c3)为旋转矩阵的系数,由全景影像的三个姿态角φ(横滚角)、ω(俯仰角)、κ(航向角)确定。
其次,由坐标(XC,YC,ZC)可以计算对应的像点在全景影像上的像素坐标(m,n)
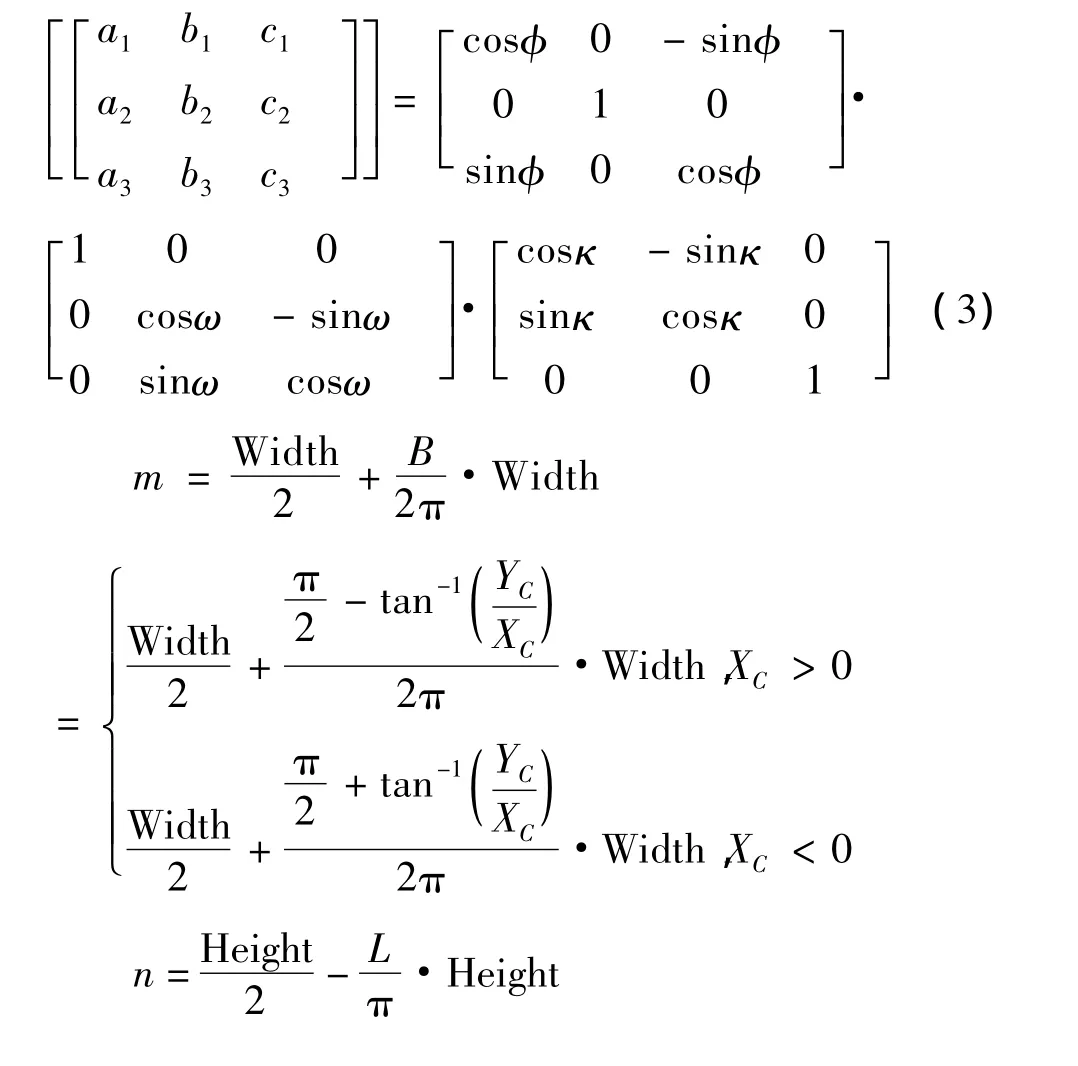

其中,Width为全景影像的宽;Height为全景影像的高。将对应像点的颜色值赋给该点,实现激光点云赋彩色:

其中,RGB(XS,YS,ZS)表示(XS,YS,ZS)的 RGB 颜色值;N为全景影像编号;RGB(m,n,N)表示全景影像上像素(m,n)的RGB颜色值。
3.2 数据融合
测量区域的地形数据和探地雷达获取图像之间的同步,是通过测量线上均匀分布的反光标识点实现的。数据采集之前,沿探地雷达测线方向每隔20 cm的距离布置标识点,共46个,如图3(a)所示。测量线上标志点分布越多,探地雷达图像与地形数据匹配的精度越高。采集数据时,当天线的中心与测量线的标识点重合时,通过探地雷达采集软件记录此时雷达图像上的水平位置。然后从彩色点云数据上提取出所有标识点的精确高程信息,通过均匀分布的标识点最终实现探地雷达图像与地形数据精确匹配,如图3(b)所示。选择测量线上的最高点所在的平面作为参考平面,根据已知目标换算的方法求出电磁波的传播速度,那么离散点相对于参考面在顺直方向上的电磁波传播双程时间差可以计算出来,如表1所示。最后运用分段插值方法(如公式(6)所示)计算出探地雷达每一道数据相对于参考平面的时间差,从而实现探地雷达图像在竖直方向上的校正处理:


表1 离散点相对于基准参考面的时间差
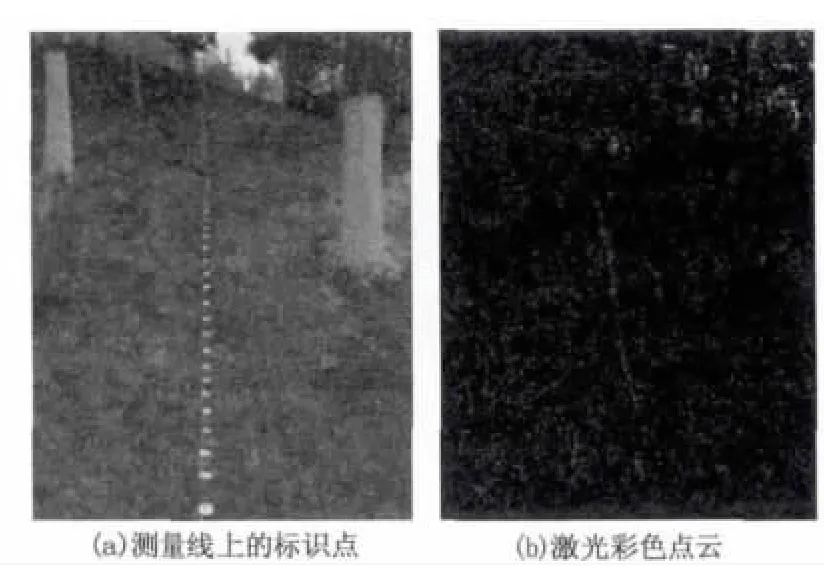
图3 实验区的彩色点云数据
4 实验结果
图4(a)为经过滤波处理后的雷达剖面,为水平方向和竖直方向成比例的矩形剖面图。水平距离3~4 m和7~8 m区域内存在明显的双曲线反射,8~10 m区域为土质疏松区,含水量比较大,反射波波形较混乱,呈高频状。根据电磁波的振幅和相位变化特征,用红色的虚线绘制出地面下介质层的分界线,随着水平距离的增加深度不断加深。图4(b)为经过地形校正后的探地雷达剖面。结合实验区的情况,可以确定出沿测线方向3~4 m处双曲线反射为部分裸露在地表上的树根,7~8 m处双曲线反射为埋在地面下的金属材质自来水管。跟地形校正前的剖面图相比,地形校正后的探地雷达图像将实验区实地形变化情况真实反映出来。通过图像上对地形变化的补偿校正,使地下目标物到地面的距离得到修正,定位的精度进一步提高;同时使地面下介质层分界线发生变化,与地面下真实的介质分布相一致。
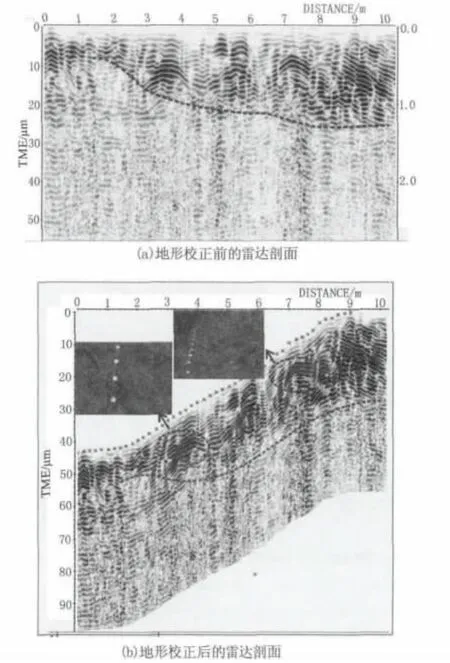
图4 地形校正前后的雷达剖面
5 结论
本文利用激光测量技术具有快速、高效获取数据及数据分辨率高的优点,通过获取实验区的彩色点云数据实现了探地雷达图像的地形校正。实验结果证明,地形校正效果明显。但此方法仅适用于地形变化倾斜度较小情况,当地形变化倾斜度较大时,需要在地形校正基础上做天线倾斜校正处理。
[1] ZHOU Hui,WANG Zhao - lei,HAN Bo,et al.Terrain correction and migration of GPR profile fulfilled simultaneously using reverse - time migration[J].Journal of Jilin University:Earth Science Edition,2004,34(3):459 -463.(in Chinese)周辉,王兆磊,韩波,等.同时实现地质雷达数据地形校正和偏移成像方法[J].吉林大学学报:地球科学版,2004,34(3):459 -463.
[2] D Percy,C Peterson.Rapid acquisition of ground penetrating radar enabled by LIDAR[J].Digital Mapping Techniques,2006,8(10):183 -185.
[3] Mercedes Solla,Henrique Lorenzo,Alexandre Novo,et al.Evaluation of ancient structures by GPR(ground penetrating radar):The arch bridges of Galicia(Spain)[J].Scientific Research and Essays,2011,6(8):1877 - 1884.
[4] S Urbini,J A Baskaradas.GPR as an effective tool for safety and glacier characterization:experiences and future development[J].Proc of the XIII Int.Conf.on Ground Penetrating Radar,2010:489 -494.
[5] Vitalii P,Volodymyr I,Sergiy K,et al.Topographic correction of GPR profile based on odometer and inclinometer data[C].14th International Conference on Ground Penetrating Radar,2012.
[6] Yilmaz O.Seismicdata processing[M].Tulsa:Society of Exploration Geophysicists,1987.
[7] ZHANG Di,ZHONG Ruo - Fei,LU Xu - Wei.Time synchronization method of laser scanner without external trigger[J].Laser & Infrared,2013,43(6):618 - 621.(in Chinese)张迪,钟若飞,鲁旭伟.无外触发的激光扫描仪的时间同步方法研究[J].激光与红外,2013,43(6):618-621.
[8] ZHANG Yu - xiang,ZHANG Xing - jun.Study on reconstruction property of free surface fitting for point clouds with laser scanning[J].Laser & Infrared,2011,41(3):351 -356.(in Chinese)张玉香,张兴军.采用激光扫描点云拟合自由曲面的重构特征研究[J].激光与红外,2011,41(3):351-356.