用GPS卫星信号探测空中目标
2014-10-21海军工程大学电气工程学院武汉430033海军大连舰艇学院航海系大连116018
(1. 海军工程大学 电气工程学院,武汉 430033;2. 海军大连舰艇学院 航海系,大连 116018)
(1. 海军工程大学 电气工程学院,武汉 430033;2. 海军大连舰艇学院 航海系,大连 116018)
利用GPS卫星信号全天候、全球实时覆盖的特点,研究以GPS卫星信号为辐射源,连续接收空中目标飞经GPS信号场的全息信号,设计了基于特征点触发采集的信号采集系统,提取目标的前向散射信号,根据目标的飞行速度确定信号的频带。在此基础上,进行目标前向散射信号的频谱分析,检测由于前向散射效应引起的信号电平突变,从而实现了对空中目标的探测。模型飞机和民航客机的探测试验结果表明,以GPS卫星信号作为辐射源,可以有效地探测到低空和高空目标飞行物。
GPS;前向散射;特征点;频谱;探测
现代军事应用中,雷达是探测空中目标的主要工具。随着隐形技术、电子干扰技术的发展,隐形飞行器、隐形舰艇、反辐射导弹等各种主动/被动干扰设备层出不穷,使得雷达面临低空/超低空突防、综合电子干扰、反辐射导弹和目标隐形四大威胁,对雷达的探测能力、生存能力构成了严重的威胁[1,2]。无源雷达应运而生。无源雷达可分为两类:一是通过检测目标自身辐射信号的无源雷达;二是通过检测第三方发射信号经目标反射的信号的无源雷达[3-4]。
基于GPS卫星广播信号探测空中目标的方法,以GPS卫星信号为辐射源,检测接收空中目标的前向散射信号,分析由GPS直达波信号和前向散射信号混合后的信号幅值、相位、频率的变化规律后,提出了基于目标特征点采集滤除直达波信号的方法,根据目标的运动速度,对滤除直达波信号后的接收信号进行频谱分析,提取目标的前向散射信号,检测前向散射信号引起的能量突变,从而实现对目标的探测。
1 前向散射信号
GPS卫星广播的信号十分微弱,利用目标反射的GPS卫星信号探测目标,会因为反射信号功率过低导致探测距离有限,从而使其应用受到限制。而利用前向散射的增强效应能够提高系统灵敏度和探测距离。
前向散射增强效应是指在目标穿越雷达基线过程中,双基地角在 170°~190°时,会出现目标雷达截面积(radar cross-section-RCS)急剧变大的现象。这种增强效应使得目标辐射信号强度显著提高。如图1所示。

图1 双基地雷达角的定义Fig.1 Definition of bistatic radar angle
1.1 目标的全息信号
根据巴比涅原理,目标在接收点场分量的合成振幅按照一定规律变化,利用阴影分量可实现对目标的探测和成像。根据合成孔径雷达(synthesis aperture radar-SAR)、逆合成孔径雷达(inverse synthesis aperture radar-ISAR)的定义,将利用接收点目标阴影分量探测目标的雷达称为阴影逆合成孔径雷达(shadow inverse synthesis aperture radar-SISAR)。在SISAR中把接收机所接收到的目标穿越雷达基线及附近区域时的前向散射场的合成振幅定义为目标的电波全息信号(Radio Holographic Signal,RHS)[5-6]。文献[6]指出目标在接收点的前向散射场的合成振幅可近似为:
式中, k = 2π/λ,λ为辐射信号波长。
式(1)中其它各字母的含义结合图2解释。
图 2 SISAR及目标的几何关系示意图Fig.2 Geometry relation between SISAR and target
如图2所示,两个坐标系分别为OXYZ、Pζης,坐标系OXYZ与Pζης平行;O点为发射端,P点为目标中心,B点为接收端;r1= OP、r2= PB分别为发射/接收端到目标的距离,基线长b = OB;(ηN,ςN)为接收点B在平面(η,ς)上的坐标。式(1)中Ω是与菲涅耳域(Fresnel zone)局部半径 rF成反比的参数:
εS(η,ς) 为阴影孔径S的指示函数,其函数表述为:

当目标以匀速v平行于OXY平面、与基线夹角为ψ飞行时,运动方程为:

这种情况下,由于衍射角在观察期间始终很小,所以阴影尺寸实际上没有发生变化。当目标沿OP辐射线上的尺寸远小于速度矢量方向上的尺寸时,其阴影孔径为:

式中,ε(η,ς)是在 yp=0、ψ = π/2时的最大阴影孔径。同样在横坐标 xp基本不变的条件下,目标沿基线方向上相对运动很小,所以我们可以假设在式(2)中 xp= xb= const,在可观测时间内将参数Ω作为与时间无关的常量。将式(3)(4)代入式(1)可得:
式中,γ为P点多普勒频率的变化率,而复轮廓函数(Complex Profile Function,CPF) H(η)为
1.2 前向散射信号
设电场强度为E(单位:μV/m),源信号功率密度为 Pu(单位:mW/m2),接收功率为 Pr(单位:mW),自由空间阻抗为120π,接收天线增益为 Gr,则电场强度E与功率密度 Pu满足:

式中,E的单位是V/m, Pu的单位是W/m2。功率密度 Pu与接收功率 Pr之间满足:

记天线内部阻抗为 Z0,则接收电压的幅值V与Pr之间满足:

将式(8)(9)代入式(10),则有:

将式(6)代入式(11)则可得到接收电压幅值与 E˙T之间满足:

GPS L1载波的信号形式可写为[9-10]:

式中, Ap为P码幅值, Pi(t)为P码序列, Di(t)为D码序列, AC为C/A码幅值, Ci(t)为C/A码序列。
则基于GPS的SISAR的前向散射信号为:
式中:λ为GPS L1载波波长,其值为0.190 32 m; fL1为L1载波频率, fL1=1575.42 MHz。
2 信号采集
普通的 GPS接收天线是全向天线,可以接收多达 12颗卫星的信号,也会接收到多个空中目标的前向散射信号。设可观测GPS卫星数为N,GPS直达信号的多普勒频移为 δfz,k、延时为 δtz,k(1 ≤ K ≤ N);目标个数为M,前向散射信号的多普勒频移为 δfq,i、延时为 δtq,i(1 ≤ i≤ M),噪声为 n(t),此时接收机的接收信号为:
由于P码处于保密状态,因此仅考虑C/A码,式(15)可简化为:

双基地雷达的多普勒频移f定义为波长λ归一化的散射信号的总路径长度随时间的变化率,若设发射端到目标距离为RT,目标到接收机距离为RR,则:

以GPS为照射源的阴影逆合成孔径雷达,本质上仍然是双基地雷达,因此目标的多普勒频移可通过式(17)计算。结合图1,可以计算得到:
设计合适的信号采集系统,采集经目标散射后的GPS信号,根据式(15),提取目标全息信号。
2.1 信号采集方法
由于L1载波频率高达1575.42 MHz,因此若在射频端采集信号,将对数据采集、数据处理、数据存储都将提出很高的要求,难以实现。解决方法是先将GPS信号从射频下变频到频率相对较低的中频,进行A/D变换和其他的后续处理后进行采集和处理工作,其结构框图如图3所示[8]。
如图3所示,视界内所有GPS卫星的射频信号通过接收天线转换成模拟信号,在通过前置放大器进行适当的放大后,被来自本振的混频信号下变频到中频(IF)。若混频频率为 fL′1,本地晶振误差为 δtRCV,混频后噪声为 n′(t) ,则中频信号可写为:
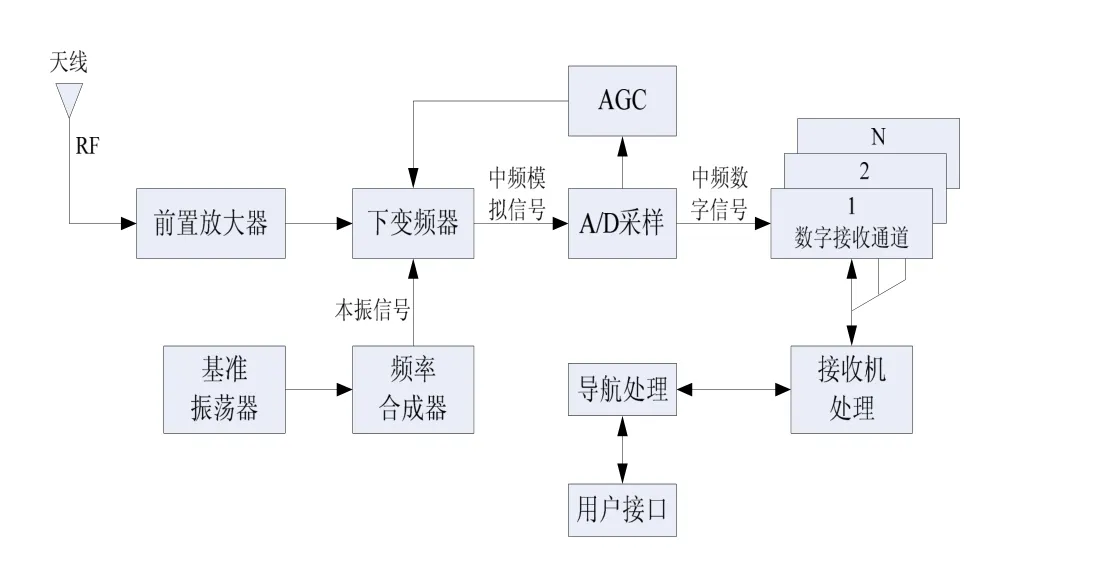
图3 信号采集过程框图Fig.3 Scheme of signal sample

为混频后的载频。
式(19)表明经过混频后得到的中频信号只是降低了载频,而信号的幅值、多普勒及PRN码等都没有变化。因此这种采集信号的方法是可行的。
2.2 天线设计
式(19)表明若使用常规的全向 GPS天线,则同时可接收到多颗不同的GPS卫星信号。因为GPS信号微弱,空间分布多颗卫星信号且同频工作,虽然经过了伪码调制,但仍然存在着彼此间的相互影响,在此背景下检测相对较弱的前向散射波是十分困难的。因此考虑设计窄带、高增益天线,只接收指定1颗卫星的信号。
采用如图4所示的圆阵列[9],采用多个普通GPS全向天线构成圆阵,利用波束形成技术,实现方向性选择,提高所选卫星信号的信噪比,并进一步抑制干扰,达到提高检测概率的目的。在圆天线阵列中,所有阵元均匀布设在圆周上,设圆半径为 a。垂直角度为θ,方位角度为φ,则第M阵元的输出为:
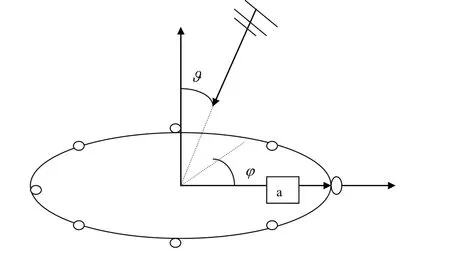
图4 圆阵列示意图Fig.4 Circle array of antenna
理论分析表明,M足够大(例如当a=6λ时M>48或 a=4λ时,M>32)时,可以实现对设定高度角和方位角卫星的信号的定向采集。
采用阵列天线,仅接收1颗GPS卫星的信号时,接受信号将简化为:

2.3 基于特征点采集的信号提取
由于GPS直达波信号难以获取,因此基于直达波抵消的全息信号提取方法难以实现。分析式(1)发现,经过阵列接收后,噪声 n(t)被抑制,信噪比大大提高。不妨先忽略噪声项,则 SIF(t)可视为直达信号 Sz(t)与前向散射信号 Sq(t)之和:
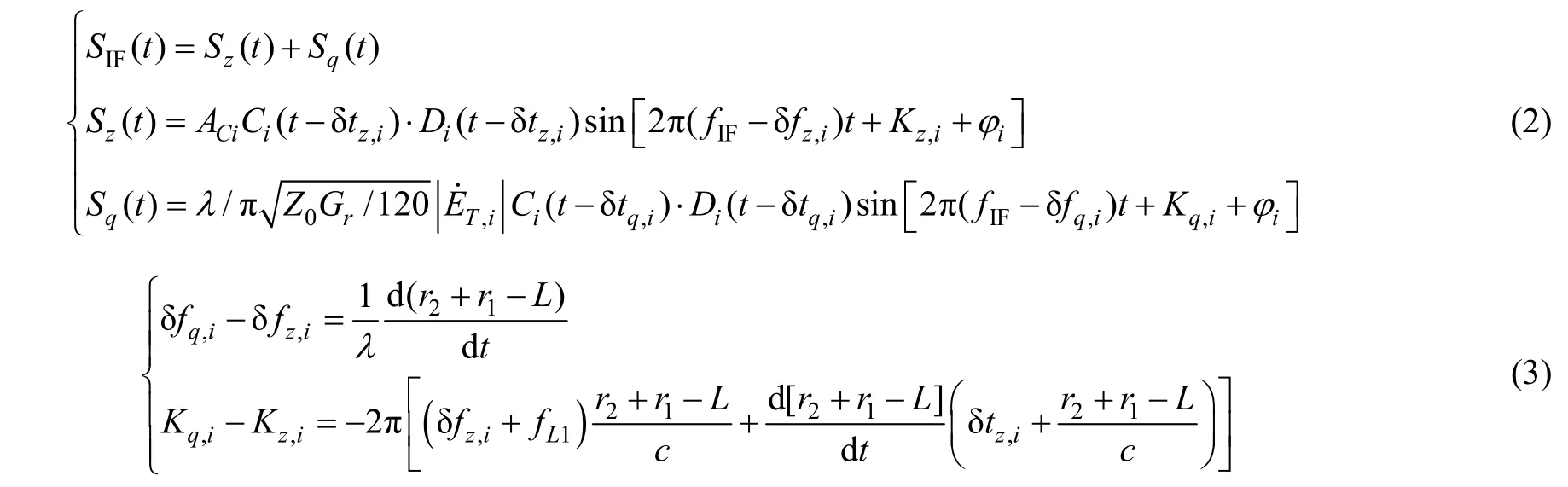
式(2)中调制信号 Ci(t)、Di(t)仅决定载波是否翻转,不会引起信号频率、幅值和相位的变化。单独分析2个相邻的载波周期(不考虑调制码),则没有目标前向散射信号和存在目标前向散射信号的波形如图5所示。
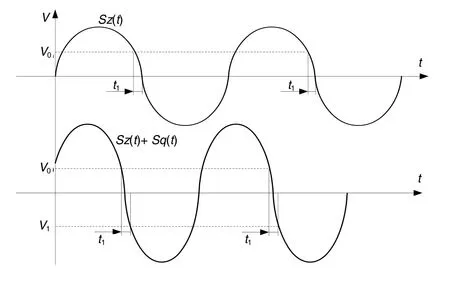
图5 触发采样原理Fig.5 The principle of level trigger sampling
由式(23)可知直达信号 Sz(t)与前向散射信号Sq(t)在频率和相位上都有所不同,当目标前向散射信号 Sq(t)≠ 0时,必然引起中频接收信号 SIF(t)在频率和相位上的变化。
若以 GPS接收信号等于ν0作为触发采集条件,且延时t1后使得 Sz(t)= 0,则如图5所示,当接收到前向散射波信号时,采样值不为 0,即可判断此时是否探测到了目标。因而将 Sz(t)= 0作为特征点,则在特征点处的采样可实现对目标的探测。
3 数据检验
数据处理分为四个步骤:第一,利用普通GPS接收机确定GPS星空图;第二,根据空中目标进场航向,确定GPS卫星辐射源,调整阵列天线视角;第三,采集经过目标散射后的GPS卫星信号;第四,根据目标飞行速度确定目标全息信号频带,利用频谱分析,保留指定频带内的数据,滤除频带外的信号,并作反Fourier换,提取出时域内的目标特征信号。
3.1 近距离小目标试验
使用 4 cm×20 cm×13 cm的金属板从天线上空0.5 m的空域抛过。采集的原始信号、经窄带滤波处理后提取的信号如图6所示。图6、图7清楚地表明,成功探测到了飞过天线上空的金属板。
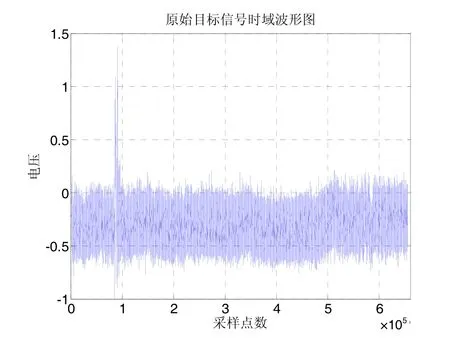
图6 原始信号Fig.6 Original signal
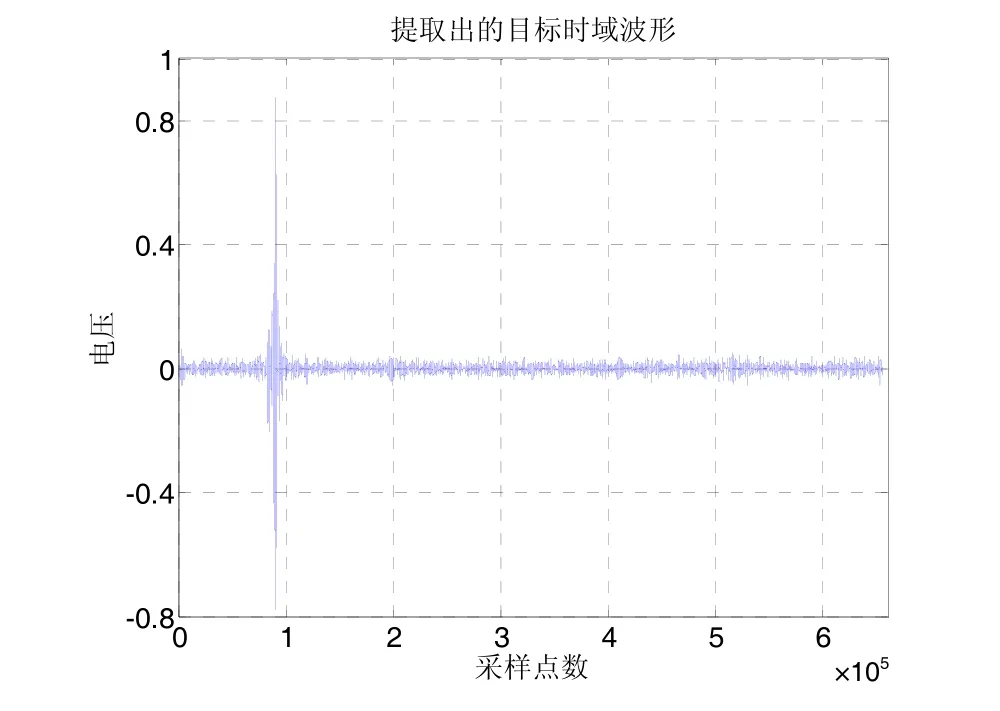
图7 提取信号Fig.7 Extraction signal
3.2 飞机模型试验
模型飞机外型如图8所示,模型翼展约0.8 m,机身长约 0.5 m。目标沿东南方向、东北、西北方向 3次快速穿越阵列。图9、图10清楚地表明,在模型飞机3次穿越天线上空时,均成功探测到目标。

图8 模型飞机外型Fig.8 The shape of aero-model
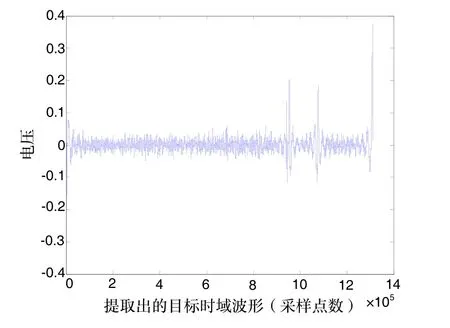
图9 原始信号Fig.9 Original signal
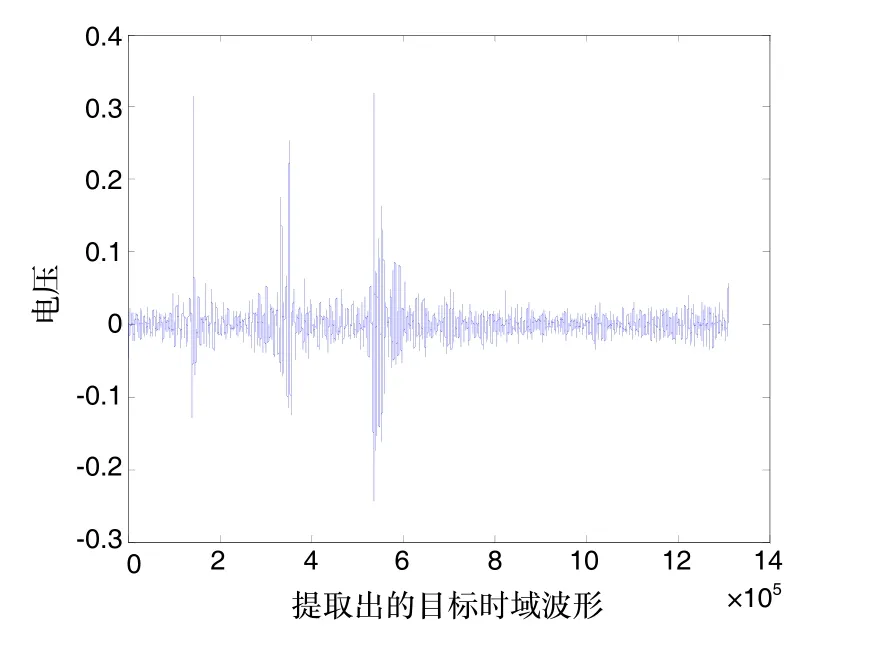
图10 提取信号Fig.10 Extraction signal
4 结 论
通过检测目标的前向散射信号探测目标的关键是对目标前向散射全息信号的提取。基于特征点采集前向散射信号的方法,可以避免GPS直达波信号不易剔除的难点。试验结果也表明,采用这种方法检测前向散射信号,从而实现目标的探测是可行的。
但这种方法也存在着不足之处:需要对原始采集信号进行频带滤波,才能够从众多背景信号中提取清晰的目标信号。但是基于频谱分析的提取方法比较粗糙,在提取的过程中会损失一些有用的频率成分或引入无用的频率成分,当频谱范围选取不当时,会出现漏警、虚警现象,且频谱范围选取需要事先估计目标飞行速度。研究不需先验知识,通过原始信号提取目标前向散射信号是一个有待继续深入研究的方向。
(References):
[1] Liao Yuyu, He Zishu, Jia Kexin, et al. Performance of polarimetric statistical MIMO radar on stealth target detection[J]. International Journal of Digital Content Technology and its Applications, 2012, 6(1): 104-112.
[2] 程院兵,顾红,苏卫民,等. 相控阵MIMO 随机多相码雷达高速目标探测[J].南京理工大学学报,2012,36(2):250-255.
CHENG Yuan-bing, GU Hong, SU Wei-min, et al. Highspeed target detection using phased-array MIMO random polyphase codes radar[J]. Journal of Nanjing University of Science and Technology, 2012, 36(2): 250-255.
[3] Kabakchiev C, Garvanov I, Behar V, Rohling H. The experimental study of possibility for radar target detection in FSR using L1-based non-cooperative transmitter[C]// 14th International Radar Symposium, 2013, Vol.2: 625-630.
[4] Wang Tianyun, Liu Changchang, Lu Hongchao, Chen Weidong. Sparse passive radar imaging based on digital video broadcasting satellites using the MUSIC algorithm [C]//2012 IEEE 11th International Conference on Signal Processing. 2012, Vol.3: 1925-1930.
[5] Kabakchiev C; Behar V, Garvanov I, Kabakchieva D, Rohling H. Detection, parametric imaging and classification of very small marine targets emerged in heavy sea clutter utilizing GPS-based forward scattering radar[C]//2014 IEEE International Conference on Acoustics, Speech and Signal Processing,: 793-797.
[6] Wang Dengwei, Zhang Tianxu, Yan Luxin. Fast hybrid fitting energy-based active contour model for target detection[J]. Chinese Optics Letters, 2011, 9(7): 071001-071004.
[7] 马建国,曹可劲,张磊,等. 基于 GPS信号的海面目标被动探测[J]. 系统工程与电子技术,2011,33(5):987-991.
MA Jian-guo, CAO Ke-jin, ZHANG Lei, et al. Passive detection of marine targets based on GPS signals reflected from sea suaface[J]. System Engineering and Electronics, 2011, 33(5): 987-991.
[8] Feng Bin, Wang Tianyun, Liu Changchang, Chen Chang, Chen Weidong. An effective CLEAN algorithm for interference cancellation and weak target detection in passive radar[C]//2013 Asia-Pacific Conference on Synthetic Aperture Radar. Tsukuba: IEEE, 2013, 160-163.
[9] Clemente C, Soraghan J J. Passive Bistatic Radar for helicopters classification: A feasibility study[C]//2012 IEEE Radar Conference(RADAR), 2012: 0946 – 0949.
[10] 刘志俭,刘毅,王跃科. 一种探测低飞目标的PD雷达仿真系统[J]. 系统工程与电子技术,2010,32(6):1131-1135.
LIU Zhi-jian, LIU Yi, WANG Yue-ke. Pulse Doppler radar simulation system for detecting low altitude targets[J]. System Engineering and Technology, 2010, 32(6): 1131-1135.
用GPS卫星信号探测空中目标
李方能1,许江宁1,周红进2,吴 苗1
Aerial target detection via GPS satellite broadcast signal
LI Fang-neng1, XU Jiang-ning1, ZHOU Hong-jin2, WU Miao1
(1. Department of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China; 2. Department of Navigation, Dalian Naval Academy, Dalian 116018, China)
Since GPS signal is all weather and global, it can be used as radiation source for aerial target detection. When the aerial targets fly across GPS signal field, a forward scattering signal from the targets body is produced and broadcasted, resulting in the mutation of its signal power. A sample system trigged by signal feature-point is designed to extract the forward scattering signal. The forward scattering signal’s frequency bandwidth is estimated by its relation with the target velocity, and the signal mutation peak is picked out via frequency spectrum analysis. The detection experiments of model airplanes and civilian airliners are carried out in different altitudes and weathers, and the test results show that the aerial targets can be detected successfully and effectively.
GPS; forward scattering; feature point; frequency spectrum; detection
1005-6734(2014)06-0788-06
10.13695/j.cnki.12-1222/o3.2014.06.016
TN9117
A
2014-06-24;
2014-10-15
国家自然科学基金(47174050);湖北省自然科学基金(2013CFB438);大连舰院自然科学基金
李方能(1978—),博士生,讲师,主要研究方向为卫星无线电导航信号处理。E-mail:fangneng_li@126.com
