静电陀螺监控器低纬度避免标定重置的快速预测方法
2014-10-21中国卫星海上测控部江阴214431天津航海仪器研究所天津300131
(1. 中国卫星海上测控部,江阴 214431;2. 天津航海仪器研究所,天津 300131)
(1. 中国卫星海上测控部,江阴 214431;2. 天津航海仪器研究所,天津 300131)
在低纬度地区,静电陀螺监控器48 h标定阶段易出现上陀螺高度角低于限定值,导致标定重置的问题。为了避免标定重置问题的出现,根据转子自转轴空间指向的变化特点,利用上陀螺的测角数据、惯导航向和位置数据,综合船舶运动、地球自转、壳体旋转的影响,推导出了预测上陀螺高度角的计算方法,并提出了适时调整载体所处纬度的规避方案。根据计算结果绘制了转子自转轴空间运动轨迹,实现了标定重置时间点的预测,预测误差小于3 min。该方法只需要很少的原始测量数据,预测精度高,提出的规避方案可操作性强,具有一定的推广应用价值。
静电陀螺仪;高度角;方位角;标定
静电陀螺监控器是当前导航精度最高的惯性设备,平台式静电陀螺监控器在低纬度地区(5°S~5°N)启动运行时,48 h标定阶段易出现标定重置的问题,导致系统无法转入导航状态[1-2]。
受标定方案的约束,当静电陀螺监控器上陀螺的高度角小于hp时,滤波器和标定时间均会重置[3]。通过对数据分析,发现标定重置时上陀螺的高度角刚好满足约束条件。
平台式静电陀螺仪转子在轴向质量不平衡摆性力矩的影响下,其空间指向并非恒定的,主要漂移误差源是转子非球形的奇次谐波,即为一次静电力力矩产生的g1项漂移。g1项漂移主要表现形式为转子自转轴在惯性空间做匀速锥摆运动,每一个陀螺仪对应的锥角以及运动的角速度各异[4]。当静电陀螺监控器处于低纬度地区时,由于g1项漂移的影响,随着时间的推移很容易使上陀螺高度角满足标定重置条件。
调整载体所处纬度是改变上陀螺高度角的直接而有效的方法,但是调整时机和纬度调整范围必须要充分考虑陀螺仪的实际漂移特性[5]。
本文对上陀螺转子自转轴空间指向的计算公式进行了推导,给出了利用静电陀螺监控器有限时段的测量数据计算g1项漂移对应锥角和角速度的方法,并结合地球自转角速度,完成了系统标定重置时间点的快速预测和载体最小纬度调整范围的确定。
1 陀螺仪支撑框架坐标系与惯性坐标系
1.1 陀螺仪支撑框架坐标系
1.1.1 陀螺仪支撑框架坐标系
静电陀螺仪安装于由方位环和高度环所确定的支撑框架内,静电陀螺监控器系统所能提供的陀螺仪测量数据主要有高度角和方位角,为确定静电陀螺仪转子自转轴在惯性空间的指向,首先应当确定其在陀螺仪支撑框架内的坐标。在陀螺仪高度角和方位角均为0°时,高度环两轴端的连线与方位环两轴端的连线的交点即为陀螺仪支撑框架坐标系的原点oc;高度环两轴端连线为xc轴,指向船右弦;方位环两轴端连线为zc轴,指向上;由右手法则可知yc轴,指向船艏向。
1.1.2 上陀螺高度角和方位角
上陀螺高度角和方位角的定义如图1所示。在陀螺仪支撑框架坐标系中,从右弦侧向左看,高度环逆时针旋转一周,上陀螺高度角由0°递增至360°;从上向下俯视,方位环逆时针旋转一周,上陀螺方位角由0°递增至360°。
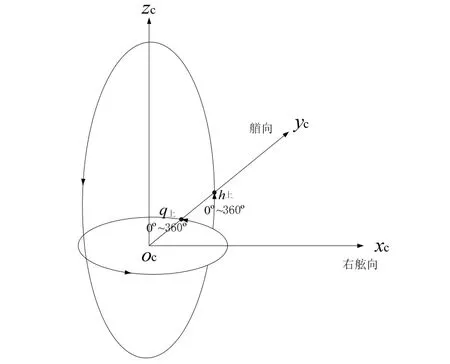
图1 上陀螺高度角和方位角Fig.1 h angle and q angle of polar axis gyroscope
1.1.3 陀螺仪支撑框架坐标系中的三维坐标
根据静电陀螺监控器所测量的陀螺仪高度角和方位角可知,陀螺仪壳体几何中心轴在陀螺仪支撑框架坐标系的指向,假设该中心轴上的一点a到坐标原点的距离为1,则该点在上陀螺支撑框架坐标系中的三维坐标如式(1)所示:
1.2 惯性坐标系
1.2.1 惯性坐标系
为便于后续计算,某一时刻惯性坐标系定义如图2所示。
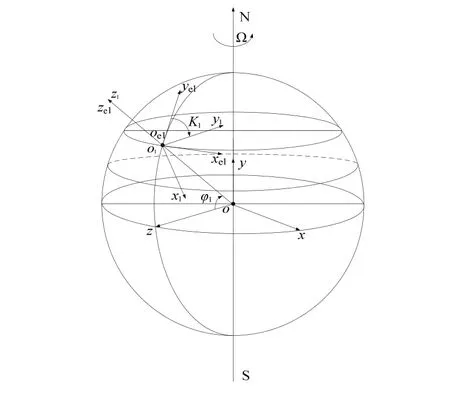
图2 惯性坐标系的定义Fig.2 The definition of inertial coordinate system
图2中,地心为惯性坐标系的原点o,y轴与地球自转轴重合,x轴与z轴均在赤道面上,其中z轴指向静电陀螺监控器惯性平台所处位置对应经度线与地球赤道的交点,x轴的指向遵循右手法则。
1.2.2 陀螺仪支撑框架坐标系与惯性坐标系的关系
静电陀螺监控器通过无减速随动系统控制平台的横摇环和纵摇环跟踪惯导水平,为静电陀螺仪提供了良好的工作环境,保证了图1中陀螺仪支撑框架坐标系x1o1y1平面与当地地理水平面平行。
在图2中,o1-x1y1z1为陀螺仪支撑框架坐标系,假设在t1时刻船舶航向为K1,所处经度为λ1,纬度为φ1,在忽略复示平台复示水平误差和惯导航向测量误差的情况下,陀螺仪支撑框架坐标系通过两次坐标旋转即可得到惯性坐标系:
① o1-x1y1z1绕z1轴逆时针旋转K1,可以得到当地地理水平坐标系oe1-xe1ye1ze1;
② oe1-xe1ye1ze1绕xe1轴逆时针旋转φ1,即可得到惯性坐标系o-xyz。
假设在t1时刻,1.1.3中a点在陀螺仪支撑框架坐标系中的三维坐标为(x1, y1, z1),则a点在惯性坐标系的坐标为:
2 陀螺仪转子自转轴空间指向
2.1 船舶运动和地球自转对陀螺仪的影响
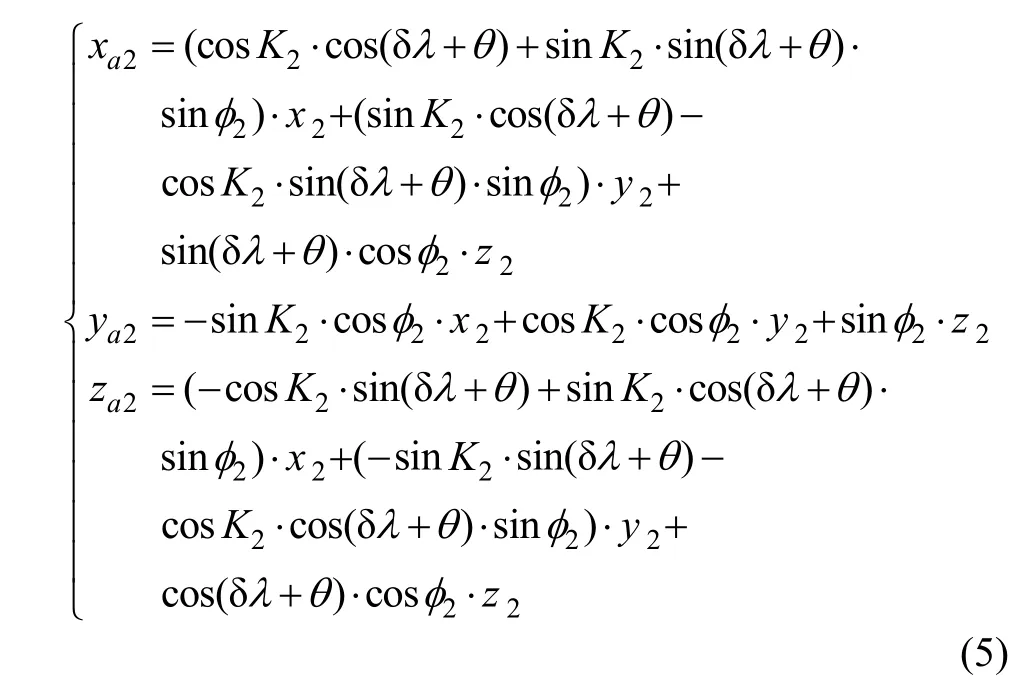
在t2时刻,船舶航向为K2,所处经度为λ2,纬度为φ2,相对于t1时刻经度变化量为:

该时段内地球在惯性空间内转动的角度为:

式中,T为地球在惯性空间内自转一周的时间,为23∶56∶4。则t2时刻陀螺仪支撑框架坐标系o2-x2y2z2需要经过三次坐标旋转方可得到1.2节定义的惯性坐标系:
① o2-x2y2z2绕z2轴逆时针旋转K2,得到地理水平坐标系oe2-xe2ye2ze2;
② oe2-xe2ye2ze2绕xe2轴逆时针旋转φ2,得到坐标系oe3-xe3ye3ze3;
③ oe3-xe3ye3ze3绕ye3轴顺时针旋转δλ+ θ即可得到惯性坐标系o-xyz。
假设在t2时刻,1.1.3中a点在陀螺仪支撑框架坐标系中的三维坐标为(x2, y2, z2),则a点在惯性坐标系的坐标为:
2.2 壳体旋转对陀螺仪的影响
静电陀螺仪在工作的过程中,壳体绕其几何中心轴旋转,约4 min转一周。静电陀螺仪壳体自转的过程中,设备通过减速器随动系统控制高度环和方位环转动,以保证壳体光电传感器中心点m始终对准转子的自转轴。该点与陀螺仪支撑框架坐标系原点的连线和陀螺仪自转轴重合。若以该点为参考点,则陀螺仪几何中心轴绕转子转动的角度与壳体旋转角度大小相等。如图3所示,om与a1ma2平面相垂直,若a1、a2对应的壳体旋转角分别为ρ1、ρ2,则:

2.3 陀螺仪转子自转轴的实际空间指向
图 3中在|oa1|、|oa2|均为1的情况下,且 a1、a2在惯性坐标系 o-xyz中的坐标分别为(xa1, ya1, za1)和 (xa2, ya2, za2),则:
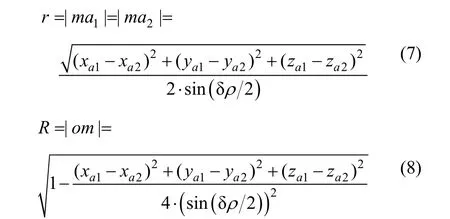
图3 壳体旋转相对关系Fig.3 The relationship of shell rotations
设m点在惯性坐标系o-xyz中的坐标为(xm, ym, zm),可以建立如下以xm、ym、zm为未知数的三元方程组[6]:
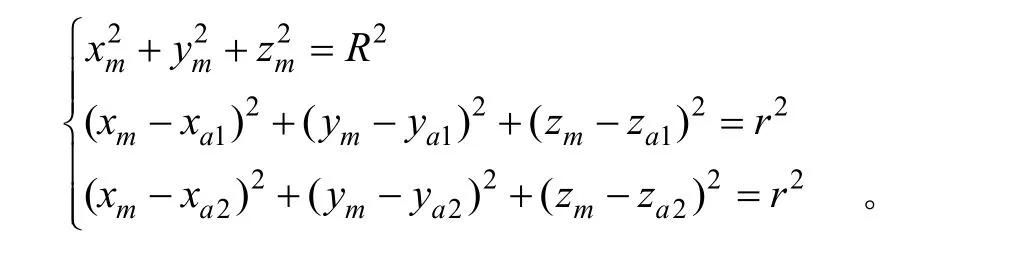
通过Matlab等计算工具可以方便地求得方程组的解,由于方程组解的表达式过长,文中没有列出。利用方程组解的表达式,对某型静电陀螺监控器25.5 h的数据进行了处理,完成了上陀螺m点在惯性空间坐标计算,绘制了 m点在惯性坐标系下的运动轨迹以及转子自转轴与赤道面的夹角变化情况,分别如图4、图5所示。
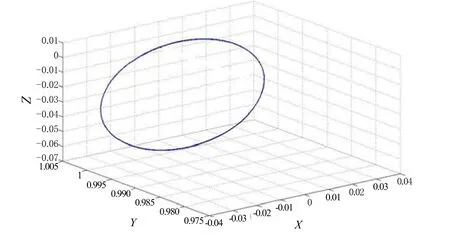
图4 上陀螺m点在惯性坐标系下的运动轨迹Fig.4 Trajectory of point m of up gyro in inertial coordinates
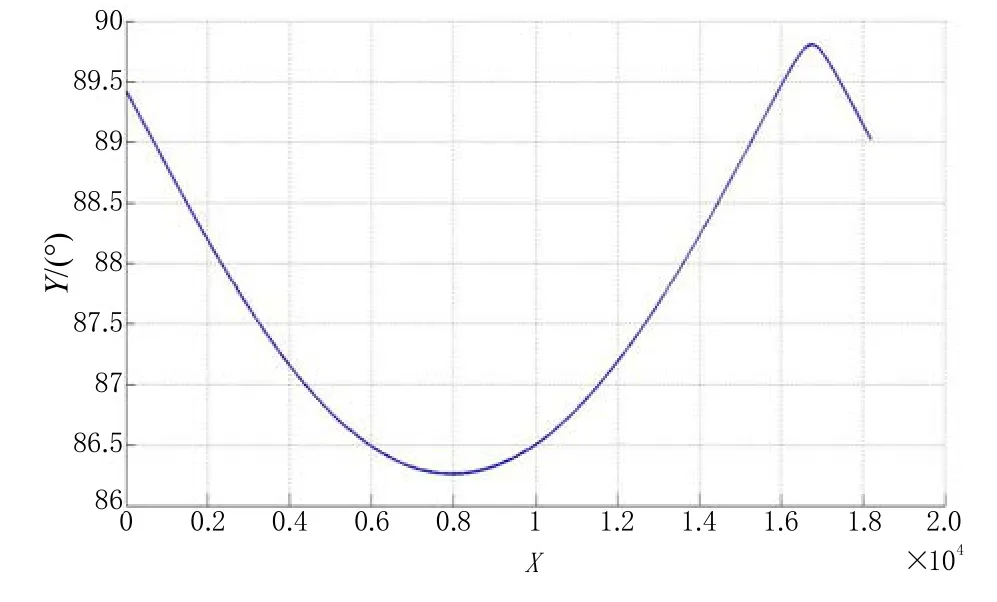
图5 上陀螺转子自转轴与赤道面夹角变化情况Fig.5 Rotor shaft of up gyro vs. equatorial plane angle
3 陀螺仪高度角的计算与预测
3.1 锥角和锥摆角速度
如图4所示,m点在空间中做圆周运动,假设圆心坐标为(xo, yo, zo),根据2.3节计算出m点运动过程中四点的三维坐标,利用圆周上的点到圆心距离相等的关系,建立三元二次方程组,便可求解出圆心的坐标,则锥角为:

根据2.3节计算出m点在任意两时刻的坐标分别为(x1, y1, z1)、(x2, y2, z2),时间间隔为t,则锥摆的角速度为:
据此可以计算出任意时刻m点的坐标(xm, ym, zm)。
3.2 陀螺仪高度角的计算与预测
根据2.3可知,陀螺仪壳体几何中心轴与转子自转轴的夹角应为:

参考2.1节,对惯性坐标系按照下列顺序进行旋转即可由惯性坐标系得到陀螺仪支撑框架坐标系:
① o-xyz绕y轴逆时针旋转δλ+ θ,得到坐标系oe3-xe3ye3ze3;
② oe3-xe3ye3ze3绕xe3轴顺时针旋转φ2,得到地理水平坐标系oe2-xe2ye2ze2;
③ oe2-xe2ye2ze2绕ze2轴顺时针旋转K2,可以得到陀螺仪支撑框架坐标系o2-x2y2z2。
m点在陀螺仪支撑框架坐标系下的坐标为:
陀螺仪壳体旋转周期约为4 min,陀螺漂移对应的锥摆运动属于缓动,故4 min时间内上陀螺高度角h上的变化范围为:

4 陀螺仪高度角预测结果验证
某型静电陀螺监控器工作于低纬度地区出现过多次标定重置的情况,根据推导出的预测计算方法,利用设备记录的陀螺仪随动后 10 min的数据对标定重置时间进行了预测。预测时间点和实际重置时间点的比较见表1。
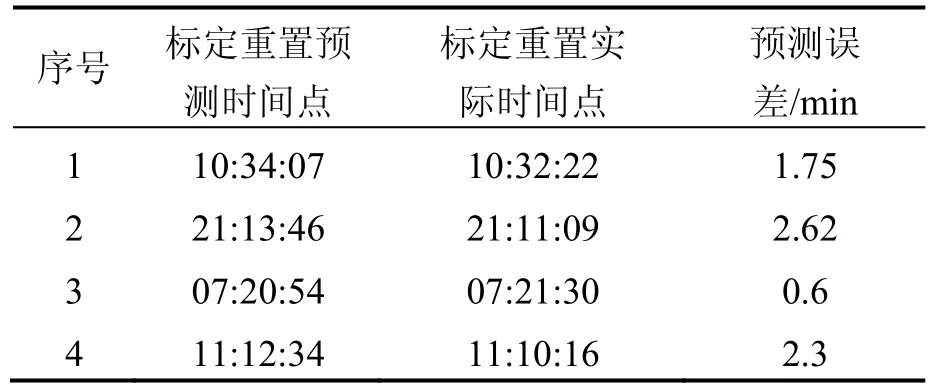
表1 标定重置预测情况统计Tab.1 Prediction statistics of calibration reset
从表1统计情况看,标定重置时间点的预测误差小于3 min。h上≤hp时系统标定将重置,由于地球自转和陀螺仪的锥摆运动具有规律性,属不可控因素。若载体在地球上静止不动,陀螺仪随动后任意时刻,上陀螺的高度角按照文中推导的方法进行计算是准确的,系统标定重置的时间点可据此进行准确预测,这与统计结果相符。根据陀螺仪的运动特性,通过调整载体的位置,特别是所处的纬度,可以使得系统在标定的过程中上陀螺高度角始终大于hp,在实际应用中,有效保证了系统标定的顺利进行。
5 结束语
根据静电陀螺仪自转轴在惯性空间的漂移特性,结合工程应用中静电陀螺监控器内部高度角和方位角定义方式和壳体旋转的特点,深入分析了静电陀螺仪高度角、方位角与陀螺仪转子自转轴之间的对应关系,利用转子自转轴的锥摆特性,推导出任意时刻点静电陀螺仪高度角的计算方法。提出了调整载体所处纬度规避静电陀螺监控器标定重置的方案,该方案具有一定的推广应用价值。
(References):
[1] 吴旭贤,周海渊,程龙,等. 航天测量船静电陀螺监控器海上动态标定[J]. 中国惯性技术学报,2012,20(4):399-404.
WU Xu-xian, ZHOU Hai-yuan, CHENG Long, et al. Dynamic calibration of ESGM on TT&C ship at sea area [J]. Journal of Chinese Inertial Technology, 2012, 20(4): 399-404.
[2] 孙昊,吴旭贤,李长波. 航天测量船静电陀螺监控器标定分析与应用[J]. 中国惯性技术学报,2013,21(2):: 159-163.
SUN Hao, WU Xu-xian, LI Chang-bo. ESGM calibration analysis and application on TT&C ship[J]. 2013, 21(2): 159-163.
[3] 刘新明,孙学成,周琳琦,等. 静电陀螺监控器海上“六次校”方法[J]. 中国惯性技术学报,2011,19(4):399-402.
LIU Xin-ming, SUN Xue-cheng, ZHOU Lin-qi, et al. Method of electrostatic gyroscope monitor’s maritime sixtimes calibration[J]. Journal of Chinese Inertial Technology, 2011, 19(4): 399-402.
[4] Sun Feng, Sun Wei, Gao Wei, et al. Research on the technology of rotation motion for FOG strapdown inertial navigation system[C]//Processing of the 2009 IEEE International Conference on Mechatronics and Automation. Changchun, China, 2009: 4913-4918.
[5] Landau B E, Yemelyantsev G I, Odinstsov B V. Electrostatic gyroscopes in attitude reference systems for orbital spacecrafts: The results of flight tests[C]//Proceedings of 2010 International Symposium on Inertial Technology and Navigation. Nanjing, China, 2010: 18-28.
[6] Zhang Kezhi, Tian Weifeng, Qian Feng. Combination of distributed Kalman filter and BP neural network for ESG bias model identification[J]. Transactions of Nanjing University of Aeronautics & Astronautics, 2010, 27(3): 226-231.
静电陀螺监控器低纬度避免标定重置的快速预测方法
王前学1,倪文秀2,刘新明1,周海渊1
Rapid prediction method for avoiding ESGM’s calibration reset in low latitude area
WANG Qian-xue1, NI Wen-xiu2, LIU Xin-ming1, ZHOU Hai-yuan1
(1. China Satellite Maritime Tracking & Controlling Department, Jiangyin 214431, China; 2. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
During ESGM’s 48 h calibration phase at low latitudes, it may occur that the altitude angle of pole gyro is below the threshold, resulting in the problem of calibration reset. In order to solve this problem, a calculation method for predicting the altitude angle was derived based on the directive characteristics of rotor shaft by using various navigation data and taking account of various influences. In addition, an avoidance scheme for timely adjusting the vehicle at a latitude was put forward. The method requires only a few original measurement data and possesses such advantages as high forecast precision and high maneuverability, showing that it is worthy of broad application.
electrostatic suspended gyroscope; h angle; q angel; calibration
1005-6734(2014)06-0707-04
10.13695/j.cnki.12-1222/o3.2014.06.002
U666.1
A
2014-07-27;
2014-10-23
王前学(1984—),男,工程师,从事惯性导航设备应用研究。E-mail:qianxuewang@163.com
