基于PID方法的汽车底盘集成控制研究
2014-10-20娄杰轩徐湜清
娄杰轩,张 蕾,徐湜清
(天津职业技术师范大学汽车与交通学院,天津 300222)
汽车底盘两系统集成控制研究中,无论是建立的悬架制动控制器、悬架转向控制器还是制动转向控制器,通常存在一定的局限性使得控制结果难以满足汽车在全工况下的整车性能要求。文献[1-2]基于广义预测控制的底盘一体化控制算法,虽然能够使车辆实际运动状态准确跟踪期望值,但是主动侧倾控制(ARC)所带来的车轮垂向载荷变化可能并不利于横摆力矩控制(DYC)得到所需的地面附着力,并且汽车在高速转弯时,车身侧倾特性的变化也会由于侧倾转向效应影响汽车的转向精度,从而影响汽车的操纵稳定性。文献[3-4]中,ABS控制下的转向制动虽然能够缩短制动距离、减轻侧滑,但是在此工况下各轮胎载荷发生转移以及转向系统和纵向制动系统之间的相互耦合,改变了各轮胎最大纵向附着力和侧偏特性刚度,从而使轮胎侧偏特性发生非线性变化,使转向制动安全稳定难于控制。考虑两系统控制方法中存在的问题,本文建立了包括悬架系统、制动系统和转向系统的整车模型。综合整车模型中各子系统间相互影响因素,并加入适当的调节控制器,对车辆在纵向、横向和垂向上进行控制调节,以改善整车的综合性能。
1 汽车仿真模型
本文应用文献[5]中的一个包括垂直运动、横向运动和车辆纵向运动的14自由度的统一车辆模型,如图1所示。图中相关参数含义如下:Ms为簧载质量;Muij为非簧载质量(i=f,r表示前后;j=l,r表示左右,以下类似);θ为车身俯仰角;γ为横摆角速度;φ为车身侧倾角;β为车身侧偏角;Lf为质心到前轴的距离;Lr为质心到后轴的距离;Ksij为悬架刚度;Kuij前后轮垂直刚度;Kaij为轮胎的侧偏刚度;Csij为悬架阻尼系数;h为侧倾力臂;Fyij为横向轮胎力;Zsij为悬架与悬挂连接点处垂直位移;Zuij为非簧载质量垂向位移;Zoij为路面输入位移。
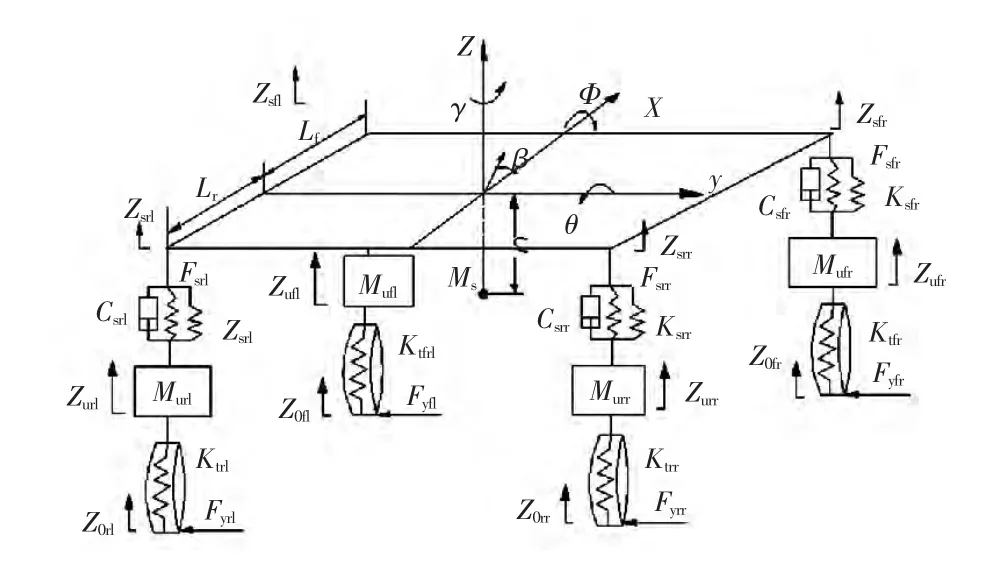
图1 车辆运动模型
2 控制器的设计
2.1 PID集成控制器的设计
综合考虑汽车行驶中的纵向、横向和垂向动力学对整车安全性的影响以及三者之间的关系,建立了基于PID算法的悬架系统、转向系统和制动系统的集成控制器,如图2所示。集成控制器包含悬架系统、转向系统和制动系统的独立控制器。控制器的输入参数分别为:车身侧倾角(φ)、车身侧偏角(β)、前轮滑移率(η);输出参数分别为:车身侧倾控制力(Fc)、车身侧偏控制力(Fp)、制动控制力(Fz)。

图2 集成控制器总成示意图
PID是一种经典的控制方法,利用相对控制误差(目标值-受控量)的比例、积分和微分,通过线性组合决定受控对象的控制量[6]。其控制规律为:

式中:Kp、Ki、Kd分别为比例增益系数、积分增益系数和微分增益系数;e(t)为反馈信号和输入信号的差。
采用一个带有滤波白噪声信号作为整车模型的路面输入,其表达式为:

式中:f0为下截止频率;GO为路面不平度系数;Vx为纵向车速;ωO(t)为均值为零的高斯白噪声。
2.2 主动悬架控制器的设计
主动悬架的动力学方程为:
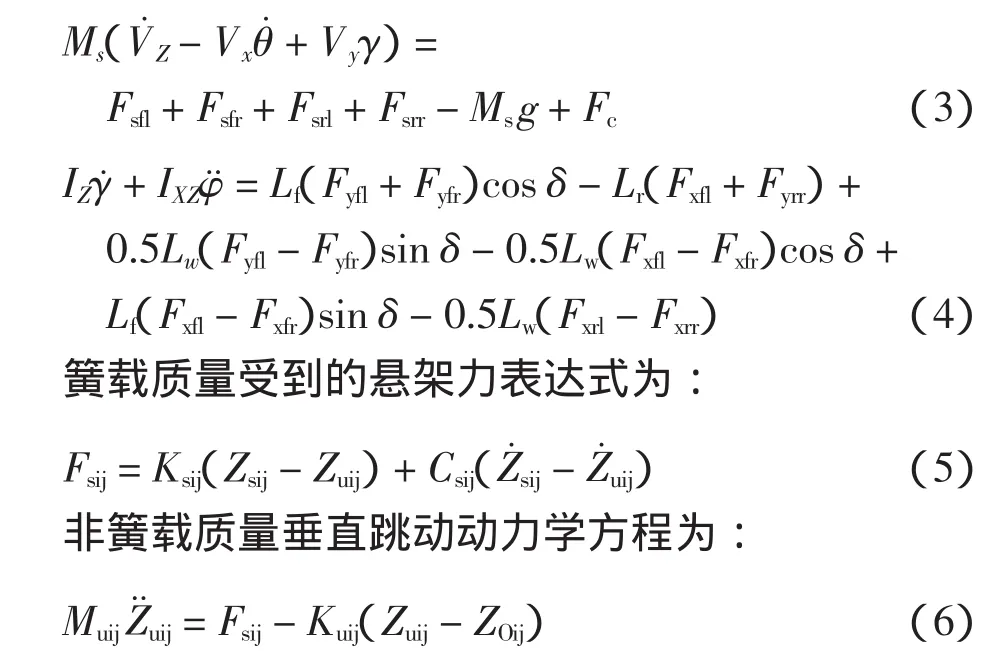
考虑到车身侧倾角φ和俯仰角θ在小范围内时,悬架与悬挂连接点处的垂直位移近似有
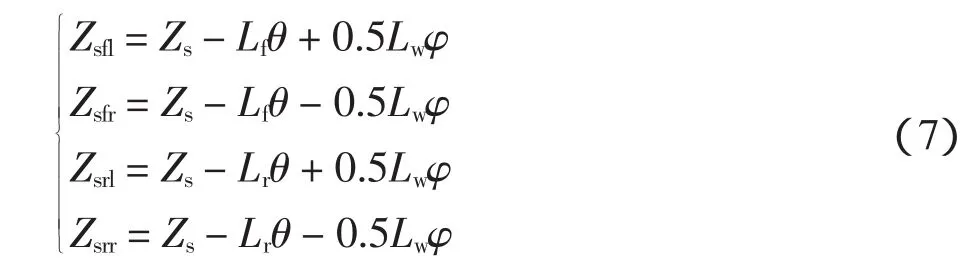
式中:Fxij为纵向轮胎力;δ为前轮转角(假设左右车轮转角相同);Vy为横向车速;Vz为车身垂直速度;Lw为轮距;Zs为车身垂直位移;Ixz为簧载质量对x,z两轴惯量积;Iz为横摆转动惯量;Fc为侧偏控制力。
建立的主动悬架的控制器如图3所示。
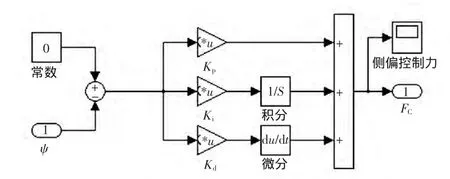
图3 主动悬架控制器
车辆行驶过程中受到同路面激励时,引起作用在各轮胎上的载荷力发生变化,进而引起各个悬架系统上的受力产生转移导致车身的倾斜。这不仅降低了乘坐舒适性,而且行车中容易出现安全隐患。因此,在控制策略上主要以减小或消除车身的倾斜为目标。悬架的控制器选用车身侧倾角φ(参考值为0)为输入参数,输出为侧偏控制力Fc。控制器中整定后的参数值:Kp=240;Ki=135;Kd=0.01。
2.3 转向控制器的设计
转向动力学方程为:

式中:Iy为俯仰转动惯量;hθ为质心至纵倾轴垂直距离;Fp为附加侧偏力。
车辆转弯工况时,基于轮胎和地面作用产生的横摆运动加剧了汽车不稳定性,使车辆的实际行驶方向与预定方向存在一定的偏差。因此,转向控制器选取实际车身侧偏角β(参考值为0)作为控制参数的输入,对车辆进行附加侧偏力Fp的干预,以减小车辆行驶中方向上的偏差,使车辆回归到预定轨迹为目的。转向控制器与悬架控制器类似,整定后的PID参数:Kp=5350;Ki=460;Kd=0。
2.4 制动控制器的设计
制动动力学方程为:

式中:Ix为侧倾转动惯量;hφ为质心至侧倾轴垂直距离;Tbi为车轮的制动力矩;M为车辆总质量;ωij为车轮的角速度;R为车轮滚动半径;Fz为制动控制力。
由于所建立的模型仿真情景是车辆在转向时采取制动措施,而这种车况下易发生车轮的抱死致使汽车发生侧滑,引起行驶车辆的安全问题。因而选取车辆的滑移率η(参考值为0.2)作为输入的控制参数,输出控制力Fz,对制动力加以调控防止车轮抱死导致车辆侧滑。制动控制器同悬架控制器类似,整定后的参数为:Kp=1350;Ki=235;Kd=0。
3 仿真结果分析
设汽车初始速率为19.8 m/s,在Matlab/Simulink环境下进行仿真。仿真环境:仿真时间达到1 s时,对模型中方向盘输入值为0.58 rad的阶跃转角,并在仿真时间达到6 s时对模型采取制动措施,仿真时长为15 s。模型中相关变量取值如表1所示。

表1 整车模型参数值
为了体现多系统集成控制与两系统集成控制的对比效果,综合考虑了汽车纵向、横向和垂向3个运动方向上的动作情况,并选取了对应3个方向上的评定参数,分别为图4的车身侧倾角、图5的车轮滑移率以及图6的车身侧偏角。图中“无控制”表示建立的三系统整车模型未加入任何主动控制器仿真获得的曲线;“悬架+制动”表示建立的三系统整车模型在主动悬架控制器与主动制动控制器工作时得到的仿真曲线;“悬架+制动+转向”表示建立的三系统整车模型在主动悬架控制器、主动制动控制器以及主动转向控制器同时工作时得到的仿真曲线。

图4 车身侧倾角

图5 车辆前轮滑移率
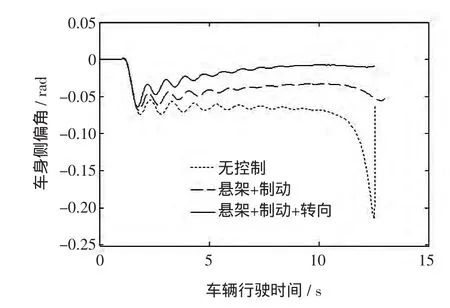
图6 车身侧偏角
仿真表明,评定车辆性能参数的车身侧倾角、车轮滑移率和车身侧偏角,最大峰值和振动幅值均不同程度地实现了减小、降低,稳态值也更加趋近期望值。图4中侧倾角的振动幅值在两系统控制下相比无控制减小了近45%,三系统相对两系统减少了近35%,使车身侧倾角更加迅速地趋于稳态,保证了车辆的舒适性与安全性。图5中的滑移率值在无控制下为1.0,车轮出现抱死拖滑现象;在主动悬架与主动制动控制下降至0.35附近,车轮滑动成分大幅降低;在三系统控制下逼近理想状态值0.2,此时车辆具备了较强的制动与转向能力,保障了汽车行驶中的安全性。图6中的车身侧偏角稳态值由-0.07 rad降到了-0.025 rad,再降到了-0.01 rad附近,相应的降幅比分别为64.3%和60%。
综合悬架系统、转向系统和制动系统的集成控制,显著降低了车身侧倾角、车轮滑移率和车身侧偏角,与被动系统、两系统相比,提高了车辆的操纵稳定性、行驶的平顺性以及行车的安全性。
4 结论
(1)针对两系统集成控制研究中的问题,建立了包含悬架系统、转向系统及制动系统的整车动力学模型,并通过将主动悬架、主动转向和主动制动技术进行集成控制,进一步提高了整车的操纵性能以及行驶中的安全性能。
(2)在三系统集成控制下,车身侧倾角的最大幅值和振动幅值都在很大程度上得到了改善,提高了车辆的乘坐舒适性。
(3)车轮滑移率在三系统集成控制下趋于理想值,这既保证了车辆制动工况所需的地面附着力,同时又具备了良好的转向能力,充分提高了汽车行驶的安全性。
(4)车身侧偏角相比无控制与两系统的集成控制下,其稳态值更加平稳、快速地趋于理想值,这不仅保证了车辆在复杂工况行驶中方向的稳定性,而且也提升了整车的综合性能。
[1]夏长高,杨锡鹤.四轮转向与主动悬架系统集成控制研究[J].拖拉机与农用运输车,2007,34(5):63-69.
[2]刘力,罗禹贡,江青云,等.基于广义预测理论的AFS/DYC底盘一体化控制[J].汽车工程,2011,33(1):52-55.
[3]初长宝,陈无畏.汽车底盘系统分层式协调控制[J].机械工程学报,2008,44(2):157-162.
[4]朱忠奎,郭旭红,刘刚.转向工况下的汽车制动防抱死控制的仿真研究[J].系统仿真学报,2009,21(10):2994-2998.
[5]来飞,邓兆祥,董红亮.基于统一模型的转向悬架系统最优综合控制方法[J].汽车工程,2007,29(3):238-242.
[6]WANG J,WILSON D A,XU W L,et al.Active suspension control to improve vehicle ride and steady-state handling[C]//Proceedings of the 44th IEEE Conference on Decision and Control,and the European control Conference.Piscataway(USA):IEEE Computer Society,2005:1982-1987.