GPS测姿系统设计与应用
2014-10-18封勇韬潘文良
封勇韬,潘文良
(中国人民解放军91550部队,辽宁大连 116023)
0 引言
美国全球卫星定位系统(Global Position System,GPS)具备全球、全天候、24 h连续高精度定位和测速能力[1]。GPS测量系统的不断成熟和完善彻底改变了传统的测量手段和方法,特别是GPS高动态、高精度技术的发展,为被传统的测量手段和技术所困扰的船体姿态测定问题的解决提供了可能,对海道测量结果精度的提高意义重大。
传统姿态测量[2]一般采用高精度惯性导航系统来实现,具备不受外界干扰和测量精度高等优势,但其昂贵的造价、复杂的设计及随着时间的推移越来越大的积累误差也是很大的劣势,导致其很难广泛地推广和应用。相对来讲,利用GPS进行实时的姿态测量具备体积小、安装及携带方便、没有积累误差和造价低等优势,并且其精度能够满足大部分的目标测量要求。
这里设计的GPS-2测姿系统[3]主要通过在运动载体布置3套GPS-2定位系统,利用实时传输的数据差分信息进行实时解算,精确地测量出运动目标的航向角、横滚角和俯仰角。测量中载体坐标系、当地水平坐标系和WGS84坐标系之间需要转换,这里不多做赘述。
1 总体设计
GPS-2测姿系统是由3个独立的GPS接收机、数据传输链路、数据转发单元和供电系统等部分构成,通过接收机接收GPS原始数据观测量,利用数据链路传输到数据处理单元,通过解析原始数据的结构,提取相应的信息并进行数据处理,利用四元代数的方法计算运动目标的姿态角。
GPS-2测姿系统的GPS天线布置在运动载体的首位线和中垂线上,3个接收机分别通过2个串口连接接口电路[4]和外挂数据记录器,如图1所示。连接接口电路的串口输出采样频率为1 Hz的原始数据,传输到中心处理单元以待实时差分处理;连接记录器的串口输出采样频率为20 Hz的原始数据以备事后处理。数据转发单元同时接收地面基准站发布的载波相位差分改正信息并传输至中心处理单元。

图1 舰船姿态测量系统设计
接收机采用的是美国TOPCON公司的GGD112T OEM板,利用数据转发单元把接收机串口发出的数据通过并口连接到中央处理工控机。中央处理工控机负责原始数据和差分信息的收集,并完成整个数据的处理和分析工作,同时输出数据的最后处理结果。
2 系统工作流程
为了优化程序,开发了一种使用VC与Matlab混合编程的方法[5]。利用Matlab强大的数据处理能力来完成载波相位的差分解算和坐标系统转换等功能,转换为C#语言进行多线程编译处理,结合2方面的优势大大地提高了其运行效率。系统工作流程如图2所示。
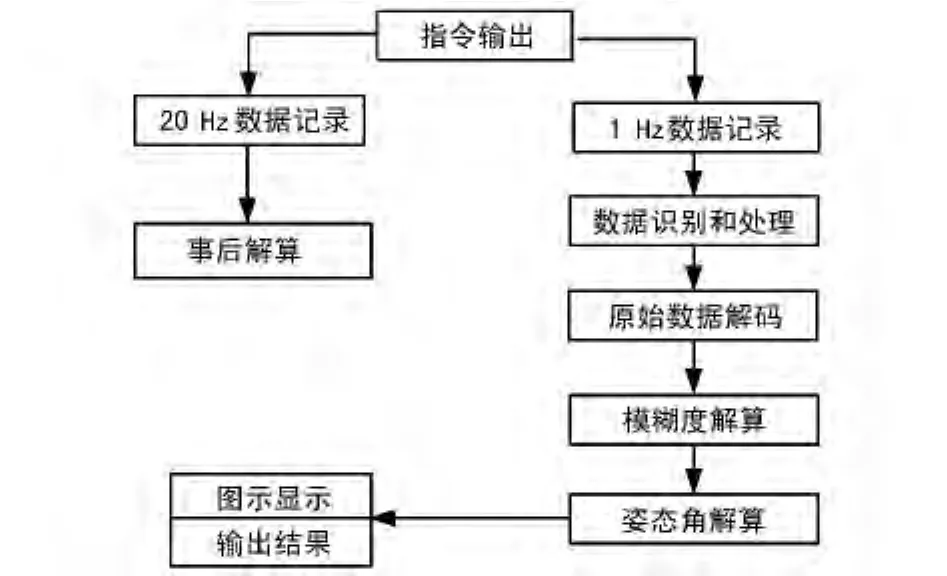
图2 系统流程
中央处理工控机发出上行指令,使各个接收机接收原始数据并从串口A输出1 Hz的原始数据到数据转发单元;数据转发单元在接收各接收机发来的1 Hz的原始数据和电台天线接收的相应GPS差分信息,并传输至中央处理工控机;中央处理工控机在接收到由数据转发单元传输的原始数据和差分信息后进行相应的分析、处理,输出解算结果并进行地图显示。
3 数据的采集和提取
数据的采集分为两部分:1 Hz的实时处理数据的采集和20 Hz的事后处理数据的采集。为了完成这项工作,必须发出2条上行指令使接收机分别通过2个串口输出不同频率的原始数据。
由自研外挂数据记录器在连接接收机的同时自动发出上行指令,使接收机通过串口C输出20 Hz的原始数据流至记录器;由中央处理工控机发送采样频率1 Hz的上行指令,使接收机通过串口A输出相应的原始数据。中央处理工控机接收原始数据后,通过信息标志来判断该串信息流是什么信息,把识别出来的数据存放到相应的变量数组中。
由于与JAVAD接收机之间的通信采用的是16进制规范,它不是以字符的形式进行通信的,而是以一种具有数据标志、固定长度和效验位信息流形式进行。要分析其原始数据格式,必须提取相应的原始数据信息[6]:日期信息 struct RcvDate、时间信息struct RcvTime、位置信息struct Pos、L1载波相位信息 struct Phase P1、L2载波相位信息 struct Phase P2以及卫星星历struct GPS Ephemeris,并进行效验和有效性检验。
4 姿态解算方法
目前关于姿态解算方法[7,8]有很多种,这里主要采用利用四元代数[9,10]的方法。GPS载波相位双差测量写成矩阵形式为:

式中,▽Δφ为载波相位差分观测量;G为卫星指向矩阵;N为整周模糊度;Rn为WGS84基线矢量矩阵;Rn=Rb,为姿态计算矩阵,Rb为天线基线矢量;v为测量噪声。
将姿态阵的九元数简化为四元数:

根据四元数的性质则有约束条件为:

利用拉格朗日算子λ可以把式(4)化为无条件的极值问题:

解出四元数后很容易解出姿态阵,进而解出航姿角来。
5 实践应用及结果分析
系统设计及研制经过实验室静态解算和动态仿真验证后进行实践应用。3个接收机天线按照直角三角形的分布安装在视野开阔的甲板上,以舰船的中轴线及其相应的垂直线交点作为图形的直角定点,天线极限长度为 1 m,解算[11,12]结果和船载陀螺平台的数据进行比对。历元数的3项姿态角的解算结果数据如表1所示。

表1 俯仰角和航向角的计算结果
为了检验数据质量及精度指标,取200个连续历元的姿态角计算结果与船载陀螺平台的数据进行比对,比对结果如图3所示。
方向角的测量精度为0.2°,俯仰角的测量精度为0.27°,滚动角的解算结果为0.38°。由上述数据结果证明,此方法和设计方案是有效可行的,但是整体数据解算过程中存在历元数据丢失的情况。
6 结束语
设计的GPS姿态测量系统为原有GPS测量系统的扩展和完善,完全从实践应用出发,为在本专业实际应用提供扩展的思路。在实际应用中多次出色的完成了外场运动载体姿态测量任务,数据记录完整有效,数据处理结果良好。实践证明证明姿态测量系统的设计、原始数据解码软件可行性和可用性,姿态测量方法理论研究的正确性和实用性。在数据丢失和精度上仍然需要进一步分析和完善。 ■
[1]刘大杰,施一民,过静君.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1997.
[2]许江宁,朱 涛,卞鸿巍.GPS姿态测量技术综述[J].海军工程大学学报,2003(3):17-22.
[3]周忠谟,易洁军,周 琪.GPS卫星测量原理与应用[M].北京:测绘出版社,1992.
[4]李现勇.Visual C++串口通信技术与工程实践[M].北京:人民邮电出版社,2002.
[5]戚科骏,宰金珉,梅国雄.C++和Matcom混合编程在数值计算编程的应用[J].南京建筑工程学院学报,2002(4):32-35.
[6]李洪涛,许国昌,薛鸿印,等.GPS应用程序设计[M].北京:科学出版社,2003.
[7]刘瑞华,张 鹏.基于改进LAMBDA算法的GPS载波相位测姿技术研究[J].航天控制,2010(3):98-102.
[8]李献球,甘兴利,李 隽.GPS卫星导航系统多频姿态测量技术研究[J].无线电工程,2012,42(4):27 -29.
[9]段志勇,袁 信.基于四元数方法的 GPS航姿解算[J].南京航空航天大学学报,1999,10(5):492 -494.
[10]陈万春,肖叶伦,赵丽红.四元数核心矩阵及其在航天器姿态控制中的应用[J].航空学报,2000,9(5):389-392.
[11]郭万禄,潘玉纯,翟峥嵘.基于双天线GPS接收机航向姿态测量方法[J].无线电工程,2012,42(5):49 -52.
[12]王立红,郝继平,汤 云.基于最小二乘法的GPS多天线测姿及精度分析[J].测试技术学报,2007(1):330-332.
