基于激光测距仪测量坡度方法的改进
2014-10-18赵振宇徐玉清周新建沈晓强
赵振宇,徐玉清,周新建,沈晓强
(总装工程兵科研一所,江苏无锡 214035)
0 引言
在地面工程坡度测量中,如果能查阅到相关地形地图,可以采用地图上的坡度尺,它是根据地形图上等高线的平距,确定相应的地面坡度或其逆过程的一种图解曲线尺[1,2]。如果没有相关地形地图可供查询,目前一种较快捷的测量方式是利用激光测距仪进行测量[3-5],通过视频观测,利用测距瞄准被测量坡面的上沿和下沿进行测距(上下沿连接线与坡面斜度一致),读取所获取的两次测距信息以及相应云台倾角数值,利用坡度测量软件计算得到坡度值[6,7]。但在实际测量中,找准与坡面斜度相同的倾斜线难度较大,从而导致测量误差较大,不能满足地面工程坡度测量误差≤1°的要求[8-10]。基于此,本文分析了激光测距仪测量坡度时存在的问题,阐释了其测量坡度的原理,并结合在标准坡面上多次实测的结果,提出了改进的方法。
1 激光测距仪测量坡度时的问题
为了叙述简单,本文基于测量标准坡展开描述。如图1所示,激光测量仪位于O点,对标准坡面KLMN进行测量(线AB与水平面的夹角值),分别在O点测量距离坡面上点A和点B的距离OA和OB,并读取∠AOB的值,通过软件计算出∠ABP,即标准坡面KLMN的坡度值。但在测量时,由于人为操作时的偏差,在读取A点后,选取下坡面上的点时可能会选成点C、点D或者点E,从而导致算取的坡度值不准确。经在标准坡面上进行多次实测得知:只有当按照与坡面斜度相同的倾斜线进行测量时,角度值才是最小的,也是最接近坡度值的,相反,测得的角度值都比实际的坡度值要大[11,12]。

图1 激光测距仪测量坡度示意
2 激光测距仪测量坡度的原理
激光测距仪进行坡度测量的原理如图2所示,其为图1的部分截图,激光测距仪位于O点,分别测量出OA和OB的距离为a和b,∠AOB的值为α,坡度值为β,则由正余弦定理可得[13]:

将式(1)和式(2)迭代,得到式(3):

通过激光测距仪测得a、b和夹角α,则在式(3)中,只有斜面坡度β一个未知参数,通过软件编程即可求得坡度β的值。
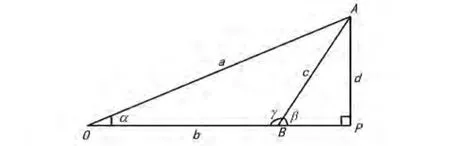
图2 激光测距仪测量坡度原理
3 基于最小值平均的改进方法
针对激光测距仪测量坡度的原理,结合在标准坡面上多次实测的结果:只有当按照与坡面斜度相同的倾斜线进行测量时,测得角度值才是最小的,也是最接近坡度值的,相反,测得的角度值都比实际的坡度值要大;同时考虑在实际测量中,找准与坡面斜度相同的倾斜线难度较大等因素,本文提出了基于最小值平均的测量改进方法。
在进行坡度测量时,应按照以下步骤进行:
①使激光测距仪正对着要测量的坡面;
②在坡面上部选取一个点作为基准点A,在坡面下部、点A在坡面上的投影线附近选取3~5个点进行测量;
③利用坡度测量软件依次计算出对应的角度值,选择角度最小值min(βi)对应的点,记为点B;
④再在点B附近选取3~5个点,仍以点A作为基准点,重复步骤③,得到第一次测量的坡度值;
⑤移动激光测距仪的位置,重复步骤①~步骤④;进行多次测量后取均值E(β)即为坡度值。
其中,步骤①~步骤④是在测量位置点逐步修正寻找与坡面斜度相同倾斜线的过程,步骤⑤是考虑不同测量位置因素进行进一步修正的过程。
4 测量结果分析
将软件按照基于最小值平均的测量方法改进后,利用激光测距仪,分别针对坡度为20°、25°和30°标准坡,在距离斜坡100 m的位置进行测量,记录坡度测量值,计算测量误差。
测量结果分别如图3、图4和图5所示。其中,对每个标准坡在4个不同位置进行测量,在每个位置点测量时采用改进方法中的步骤①~步骤④,得到各次测量结果,再将4次测量结果取平均作为最终测量结果,对应改进方法步骤⑤。由图可以看出,在各个位置点测量时由于采取了多点逐步修正的方法,测量误差已经较小,再将不同测量位置因素考虑在内进行平均后,得到的最终测量结果与实际坡度值就很接近了,测量坡度误差≤1°。
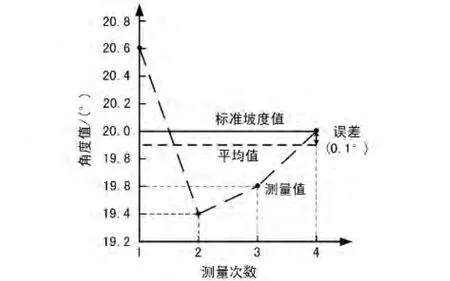
图3 对20°标准坡测量结果
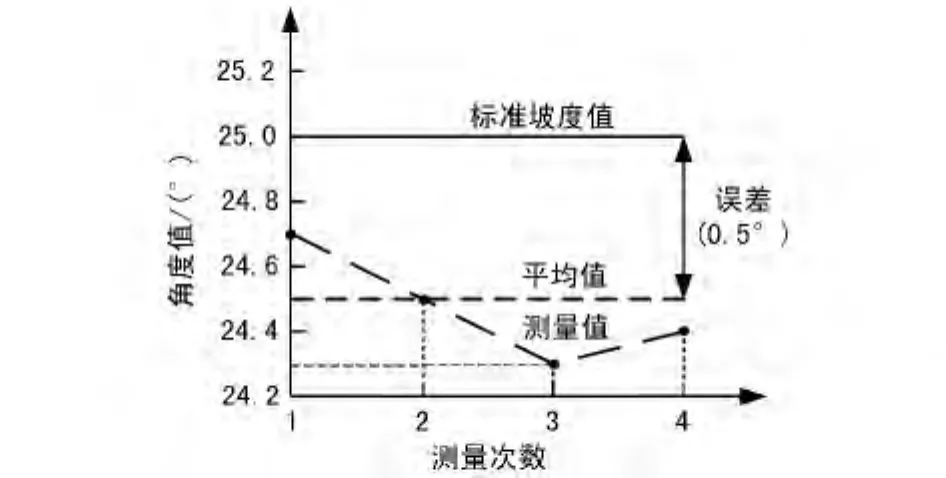
图4 对25°标准坡测量结果
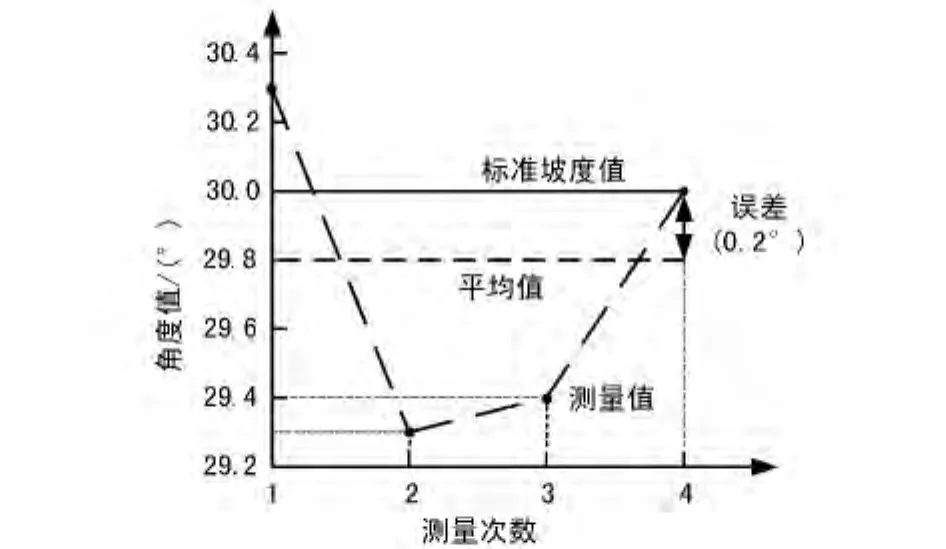
图5 对30°标准坡测量结果
图中的单次测量结果都是在同一位置多次测量并逐步修正寻找与坡面斜度相同倾斜线得到的,这和同一位置单次测量、同一位置多次无规律测量相比,是有明显优势的。
5 结束语
地面工程坡度测量是地形地貌的一个主要测量内容,其测量精度对于绘制地形地图、工程施工等都具有重要的意义。在实际测量中,找准与坡面斜度相同的倾斜线难度较大,上述研究内容是运用多测量点逐步修正,并考虑不同测量位置因素来找出坡面倾斜线的方法,该方法已在实际测量中多次验证,取得了良好的测量效果。 ■
[1]刘慧敏,樊子德,邓 敏,等.地图上等高线信息度量的层次方法研究[J].测绘学报,2012,41(5):777-783.
[2]曹亚妮,江 南,张亚军,等.电子地图符号构成变量及其生成模式[J].测绘学报,2012,41(5):784-789.
[3]楼德侃,李志强,南海涛.DS/FH信号的测速测距性能分析[J].无线电通信技术,2013,39(3):64 -66.
[4]李华东,邓 辉,姜永玲.激光测距仪在高陡边坡结构面产状测量中的应用[J].山地学报,2010,30(4):28-31.
[5]吴 琼,梅进杰.大气激光通信中的LDPC-BICM技术研究[J].无线电通信技术,2012,38(3):26 -28.
[6]党 赟,周 亮.基于应用的多测距音测距改进技术[J].无线电工程,2011,41(8):21 -24.
[7]王建波.激光测距仪原理及应用[J].有色设备,2002,36(6):26-30.
[8]张汉奎,俞 乐.一种新的坡位定量描述方法及其与滑坡发生的关系[J].遥感技术与应用,2012,27(4):609-613.
[9]魏子卿.大地测量中的永久潮汐问题[J].测绘学报,2012,41(4):475 -482.
[10]陈秀忠,常玉奎,金荣耀.工程测量[M].北京:清华大学出版社,2013.
[11]孙爱程.基于熵距离的离群点检测及其应用[J].无线电工程,2012,42(6):45 -47.
[12]卢华兴,刘学军,王永君,等.插值条件下格网DEM坡度计算模型的噪声误差分析[J].测绘学报,2012,41(6):926-932.
[13]倪小春,毛祖涛.在工程测绘中正余弦定理的运用[J].城市建设理论研究(电子版),2013,12(7):22-25.
