基于观测器的LMI振动控制算法
2014-10-12王露健周星德秦飞马李勇直
王露健,周星德,秦飞马,张 翔,李勇直
(河海大学土木与交通学院,江苏南京 210098)
振动主动控制中的系统模型只是实际物理系统的一个近似,模型误差存在必然会降低控制系统的功能;由于系统的状态不可测或不易观测,测量结果可能受噪声干扰,必须采用观测器来进行状态变量估计[1-3]。基于观测器的状态变量估计是振动主动控制技术应用于实际的关键,而观测变量个数往往少于状态变量个数,导致状态变量估计值出现较大误差。为了实现振动主动控制的目的,控制器设计需满足稳定性要求。目前,多数控制器设计利用Lyapunov稳定性原理来保证闭环系统的稳定性[4-5]。此外,控制器设计还要满足一定的性能指标及约束条件。随着振动控制策略研究的深入,设计中往往存在多个约束条件,同时各个约束条件之间相互制约,因而线性矩阵不等式(LMI)得到了应用[6-11]。但在实际的应用过程中,含多个未知参数的LMI求解存在缺陷,因此,笔者以文献[12]作为参考对基准建筑物进行控制器设计,并对由约束条件及性能指标构造的含2个未知参数的LMI求解做出改进。
1 控制器设计
建立状态方程如下:

式中:xp——2r×1维状态矢量;t——时间变量;A——2r×2r维矩阵;D——2r×g 维矩阵;u——作动器控制力向量;E——2r×1维矩阵——地震波加速度。
以位移作为控制输出矢量:

式中:H——q×2r维输出矩阵(q为控制输出的状态变量数目)。
采用Kalman滤波器进行状态变量估计,设测量方程与控制输出方程一致,最优估计如下:

其中

由于地震波是未知的,在进行控制器设计时采用不考虑地震外激励的模式。误差函数定义为

其导数为

对照文献[12],本文不存在参考模型,故将控制力的表达式定义为

式中:γ——正数;P——相应维数的正定矩阵。
为保证控制力作用下系统的稳定性,构建Lyapunov函数

对其求导,简记为如下二次型形式:

其中

Basher[12]提出基于观测器的LMI控制方法,要求矩阵Q<0,满足稳定性,但未给出P和γ的确定方法。同时确定P和γ是很困难的,此外,考虑到‖P‖和γ的数量级问题,本文提出如下优化模型:

在求解策略方面,提出通过给定P来优化γ的方案;为了保证‖P‖和γ数量级一致,可以对角矩阵的方式给出初值P;笔者通过调试,发现采用单位矩阵作为初值P是一个较优的选择。具体求解过程如下:(a)令P=I(I为相应维数的单位矩阵);(b)通过式(9)进行优化计算,确定目标函数J;(c)利用式(6)确定控制力,在进行仿真分析时,笔者发现u=γDTPxz不能达到很好的控制效果,进而根据实际控制要求来确定调节因子β。最终得到控制力的表达式为

2 实例分析
有关3层基准建筑物的详细定义、截面尺寸及节点划分可参阅文献[13]。
每个节点考虑水平、竖直和转动共3个自由度,整个结构共计60个自由度,去掉约束后还有45个自由度。在地震作用下的振动方程可表示为

式中:M、C、K——建筑物质量、阻尼和刚度矩阵,均为45×45阶矩阵;Γ——地震作用的位置矩阵;¨xg——地震波加速度;B——作动器定位矩阵,为45×p阶矩阵;u——p×1维控制力矢量(p为作动器数目)[14]。
为了验证本文方法的可行性,对3层基准建筑物进行仿真。地震波采用Kobe波,时间历程取为50 s。楼层1布置2个相同的作动器,楼层2和楼层3各布置1个作动器。控制输出楼层2和楼层3的位移。
由于3层基准建筑物的自由度数目比较多,本例中取前5阶模态进行降阶计算[15-16]。前5阶自然频率为0.99 Hz、3.06 Hz、5.83 Hz、7.23 Hz、9.97 Hz。
式(1)的状态方程中xp为10×1维状态矢量,A、D、E分别为10×10、10×2、10×1维矩阵。式(2)中H为2 ×10 维输出矩阵,其中 H(1,2)=1,H(2,3)=1,其余均为0。
通过求解器,得到Kalman滤波器的增益矩阵L,从而得到所有状态变量的估计值。

再通过优化模型(式(9))的求解,得到J=0.7。然后经过反复调试,得到较优的调节因子β=1013,从而得到最终的控制律α:

最后给出控制前后楼层2和楼层3的位移响应及作动器控制力的时程曲线,见图1、图2。
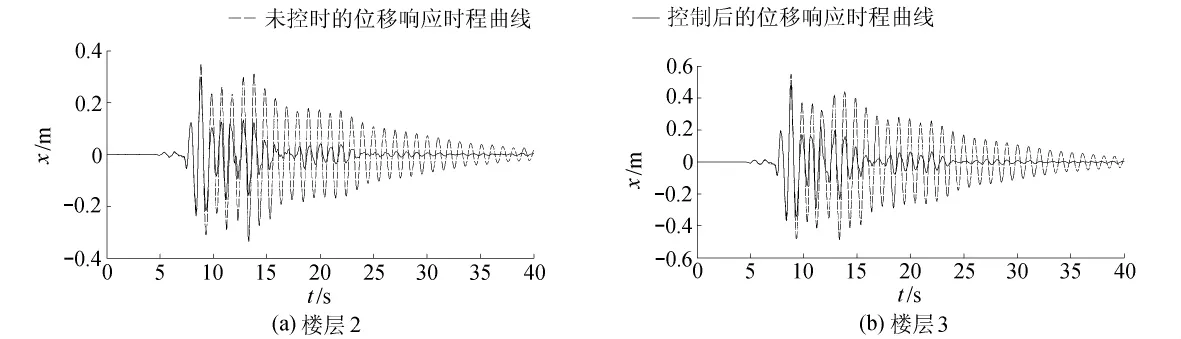
图1 控制前后的位移时程曲线Fig.1 Displacement time histories before and after control
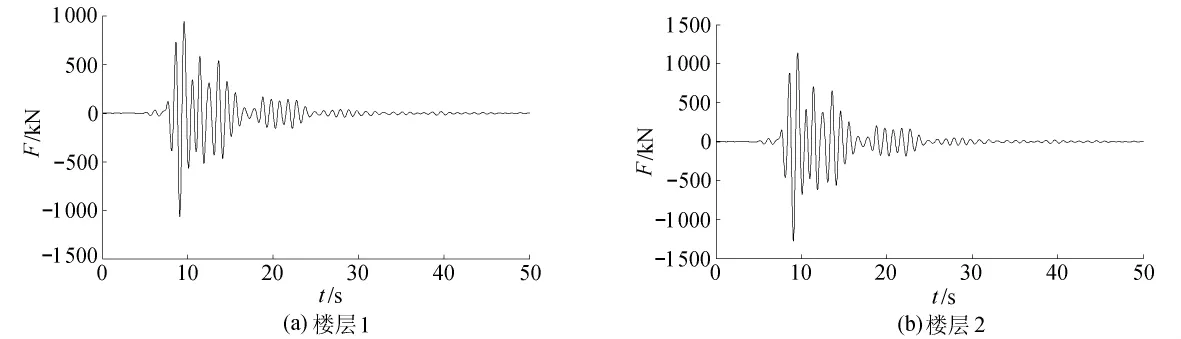
图2 作动器控制力时程曲线Fig.2 Control time histories of actuator
3 结 语
以3层基准建筑物为研究对象,在保证系统稳定并满足约束条件的限制下,建立了含有2个未知参数的线性矩阵不等式,通过对不等式求解,得到较优的性能指标,并在不断的调试下得到最终的控制律。从仿真结果看,本文方法具有较好的控制效果。
[1]GONZALEZ R,FIACCHINI M,RODRIGUEZ F,et al.Adaptive control for a mobile robot under slip conditions using an LMI-based approach [J].European Journal of Control,2010,16(2):144-155.
[2]KARIMI H R.Observer-based mixed H2/H∞control design for linear systems with time-varying delays:an LMI approach[J].International Journal of Control Automation and Systems,2008,6(1):1-14.
[3]韦俊青.基于状态观测器的不确定性线性系统鲁棒控制研究[D].广州:广东工业大学,2013.
[4]SATHANANTHAN S,KNAP M J,STRONG A,et al.Robust stability and stabilization of a class of nonlinear discrete time stochastic systems:an LMI approach[J].Applied Mathematics and Computation,2012,219(4):1988-1997.
[5]YANG Xikai.Observer-based anti-windup compensator design for saturated control systems using an LMI approach[J].Computer& Mathematics with Applications,2012,64(5):747-758.
[6]ZHANG Qingjiang,YE Sijun.An enhanced LMI approach for mixed H-2/H-infinity flight tracking control[J].Chinese Journal of Aeronautics,2011,24(3):324-328.
[7]ZHANG Kuanyu.Multi-objective control for stochastic model reference systems based on LMI approach and sliding mode control concept[J].International Journal of Systems Science,2013,44(4):739-749.
[8]李文章,吴凌尧,郭雷.基于LMI的结构振动鲁棒H∞控制[J].振动工程学报,2008,21(2):157-161.(LI Wenzhang,WU Lingyao,GUO Lei.Robust H∞ control of structural vibration based on LMI[J].Journal of Vibration Engineering,2008,21(2):157-161.(in Chinese))
[9]KARIMI H R,GAO Huijun.LMI-based H-infinity synchronization of second-order neutral master-slave systems using delayed output feedback control[J].International Journal of Control Automation and Systems,2009,7(3):371-380.
[10]BAI Mingchang.Robust control of uncertain time-delay systems via sliding mode control and LMI-H(infinity)technique[J].Journal of Marine Science and Technology-Taiwan,2008,16(1):1-7.
[11]LIAN Changhua,YU Kewei.LMI optimization approach on robustness and H-infinity control analysis for observer-based control of uncertain systems[J].Solitons & Fractals,2008,36(3):617-627.
[12]BASHER H A.An LMI approach for observer based model reference control[C]//IEEE SoutheastCon-Proceedings.Jacksonville,FL:IEEE Jacksonville Sect,2013:1-5.
[13]OHTORI Y,CHRISTENSON R E,SPENCER B F,et al.Benchmark control problems for seismically excited nonlinear buildings[J].Engineering Mechanics,2004,130(4):366-385.
[14]周星德,陈国荣.3层基准建筑物地震激励多目标控制[J].振动工程学报,2006,19(3):394-398.(ZHOU Xingde,CHEN Guorong.Multiobjective control for earthquak-excited 3-storey benchmark buildings[J].Journal of Vibration Engineering,2006,19(3):394-398.(in Chinese))
[15]周星德,姜冬菊.结构振动主动控制[M].北京:科学出版社,2009.
[16]蒋杨,周星德,王玉,等.基于分数阶的建筑结构预测控制方法[J].河海大学学报:自然科学版,2011,39(5):556-560.(JIANG Yang,ZHOU Xingde,WANG Yu,et al.Predictive control method of building structure based on fractional order[J].Journal of Hohai University:Natural Sciences,2011,39(5):556-560.(in Chinese))
