增程式电动汽车控制策略的优化*
2014-10-11闵海涛叶冬金于远彬
闵海涛,叶冬金,于远彬
(吉林大学,汽车仿真与控制国家重点实验室,长春 130025)
前言
国外AVL、MAHLE和FEV等公司在增程式纯电动车整车控制方面进行了多年的研究与实践,但主要是对发动机工作点/区域及其控制效果进行研究,这种方法并不能确定所制定的控制策略与系统能达到的最佳性能的接近程度。为解决此问题,本文中利用NSGA-II算法,以系统循环损失能量最小为优化目标,对增程式纯电动车控制策略进行优化。
1 增程式电动汽车的构型与控制策略
1.1 增程式电动汽车结构
增程式电动汽车的结构特点就是在传统纯电动汽车基础上加装发动机和发电机组,如图1所示。因此纯电动汽车所具备的特点在增程式电动汽车上依然具备[3]。与传统混合动力汽车相比,增程式电动汽车的发动机功率较小,电机和电池功率较大,电池可向电网充电。
本文中所用增程式电动汽车主要技术参数如表1所示。
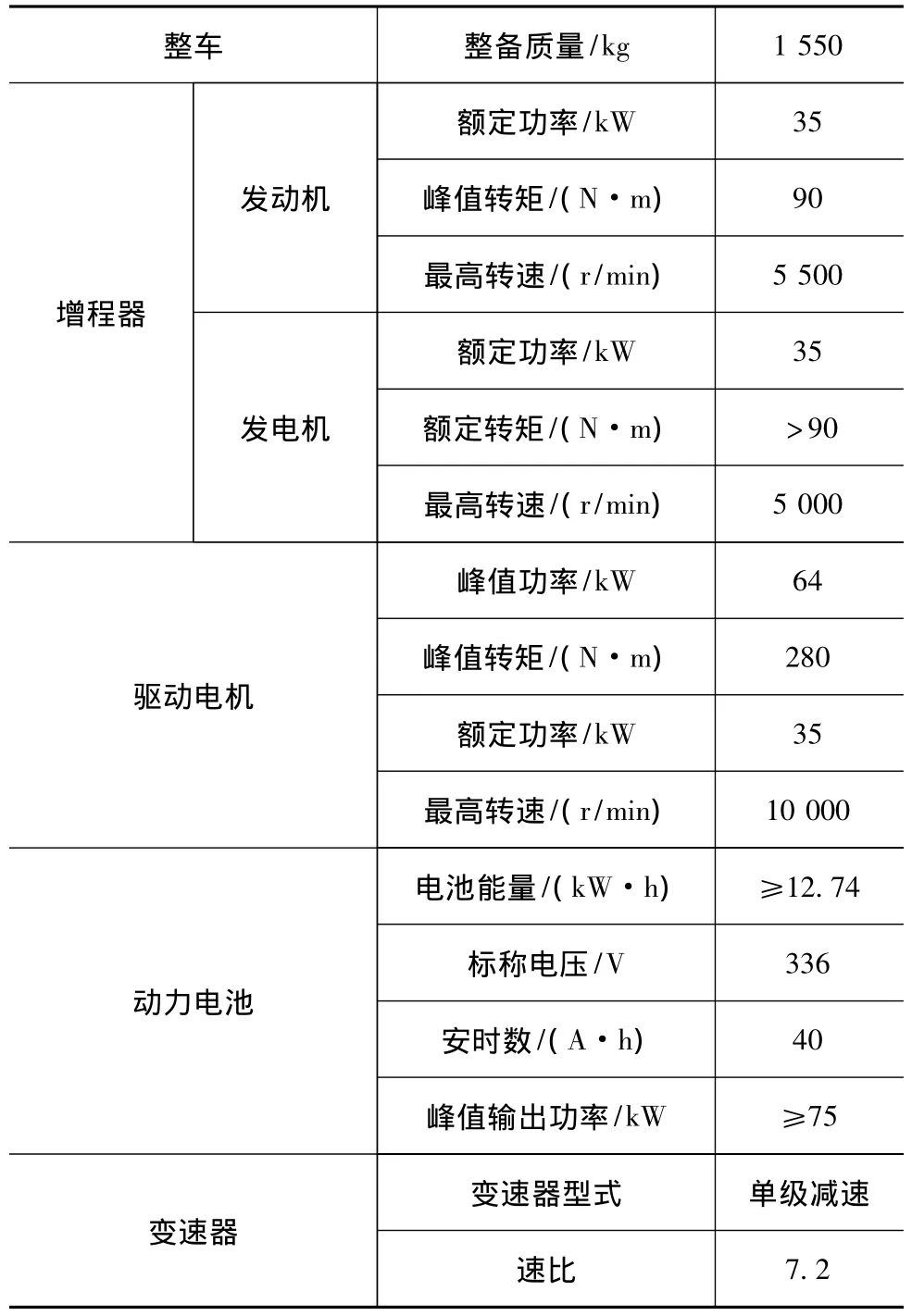
表1 增程式电动汽车仿真模型参数
1.2 增程式电动汽车控制策略
增程式电动汽车电池组工作模式如图2所示。增程式纯电动车在电池充满电的初期行驶阶段,整车的需求功率完全由动力电池提供,发动机不参与工作,此时增程式纯电动车相当于纯电动汽车;当电池组的能量消耗到一定程度时,发动机起动,与动力电池协同工作,此时增程式纯电动车相当于混合动力汽车。增程式纯电动车电池容量只须满足城市大部分人员每天行驶里程的要求,所以与纯电动汽车相比,电池成本大幅下降;而增程式纯电动车发动机的使用,主要是为避免驾驶员对行驶里程的担忧,并且只是在电池电量不足时才起动,发动机无须提供车辆所有的动力需求,其功率可显著降低。
1.2.1 增程式电动汽车工作模式
增程式纯电动车动力系统有两个动力源:发动机发电机组(增程器,或称辅助动力单元)和动力电池组。根据两个动力源不同的能量分配形式,增程式纯电动车的基本运行模式有:EV模式、串联驱动模式、发电机组驱动行车发电模式和制动能量回收模式等。图3(a)为EV模式:发动机发电机组不参与工作,车辆以动力电池组消耗能量的形式行驶,此时电池组的电量在不断消耗,即SOC不断减少。图3(b)为串联驱动模式:发动机驱动整车行驶,当发动机不足以单独驱动车辆行驶时,动力电池提供功率需求不足的部分。图3(c)为发电机组驱动行车发电模式:这种情况下,发动机单独驱动车辆行驶,发动机输出功率超出车辆需求的部分向动力电池充电,以此提高发动机工作效率和整车能量利用率。图3(d)为制动能量回收模式,车辆在滑行或制动时动力总成进入该模式:当驾驶员踩下制动踏板或猛抬加速踏板时,整车进入制动能量回收模式,驱动电机进入发电状态,给动力电池组充电。这种模式下,电制动和机械制动联合作用,二者的分配比例由整车行驶状态决定。
1.2.2 整车驱动策略
与很多其他国家比较而言,现阶段我国的小学语言识字过程缺乏新颖的方法模式。处于低年级的小学生他们思想与心智都不够成熟,识字教学还存在相应的困难。乏味呆板的识字过程并不能激起他们学习的兴趣,怎样改变传统枯燥的教学方法引发学生强烈的学习兴趣便是关键课题。
整车驱动策略设定了3个发动机工作点和基于车速切换的上、下限值,在工作中发动机的工作点或工作段是通过比较车速的当前值与切换限值来进行切换,这样能够使系统更高效稳定地工作,并能简化整车控制策略。发动机三点控制策略的规则如下:
(1)根据整车功率需求,在发动机中寻找轻、中、高负荷的3个工作点,见图4,分别记为PL、PM和PH,这3个点均为相应功率下的最佳燃油经济点;
(2)设定车速切换上下限值为vH、vL,二者的值分别为80和50km/h;
(3)在电量消耗模式,动力电池提供车辆行驶所有的功率需求;
(4)在电量保持模式,采用APU为主、电池为辅的控制模式。第1种情况是当电池能输出的功率足够并且SOC值大于设定的下限值时,这种情况下当车速大于vH时发动机工作于高负荷的PH点,当车速介于vL~vH时,发动机工作在介于高负荷和中负荷的PM点,当车速小于vL时,发动机工作于低负荷的PL点;第2种情况是当电池能输出的功率不足,并且SOC值小于设定的下限时,判断车速是否大于vH,当满足条件时工作在PH点,否则工作在PM点。
该控制策略利用了增程式纯电动车增程器工作状况不用跟随负载功率需求的特点,通过在第(1)、(2)步中设定的多工作点工作模式和车速切换限值,减小了车速波动大的情况下发动机工作点的切换频率,第(3)步保证了电流消耗模式下的纯动力电池工作状态,而通过第(4)步的工作点切换策略,在优化发动机燃油经济性的基础上也使动力电池SOC稳定在一定的区间内,这有利于提高动力电池的效率和使用寿命。
2 增程式电动汽车控制策略优化分析
在控制策略设计中须解决的一个非常重要的问题:对于已经确定的增程式纯电动车的系统配置,实际制定的控制策略得到的性能是否接近系统能达到的最佳性能。本文中对增程式纯电动车控制策略的控制参数进行优化,以确保所制定的控制策略得到的整车性能尽量接近系统能达到的最佳性能。
2.1 NSGA-II优化算法
带精英策略的非支配遗传基因算法(NSGA-II)具有较强的全局搜索和求解问题的能力,鲁棒性强,适用于并行处理,是一种比较好的全局优化方法[4-5]。
针对增程式纯电动车控制策略优化的问题,将NSGA-II算法在增程式纯电动车控制策略优化问题的应用流程总结为:首先,随机产生N个个体形成初始种群Pt,得到子代种群Qt,将子代种群与父代种群组合成大小为2N的种群Rt;其次,对种群Rt中的个体进行非支配排序和拥挤度计算,从中选择最优的N个个体存入种群Pt+1中;最后,对新种群Pt+1进行遗传算法的基本操作(选择、交叉、变异)产生新的子代种群Qt+1,查看迭代代数是否满足要求,如果没有,将Pt+1和Qt+1组合成大小为2N的种群Rt+1,并重复上述操作,如果满足,则停止迭代。经选定不同迭代代数的多轮实验,确定迭代代数为80,因此时种群的质量已趋稳定。
2.2 优化变量
在增程式纯电动车的控制策略中,发动机工作点是随着车速不同而切换的,用到两个限值(工作点1/2切换限值、工作点2/3切换限值)以切换发动机工作点,这两个限值分别用cyc_mph_low和cyc_mph_high表示,现对这两个参数进行优化,使整车效率得到提高。另外,发动机起停的频繁程度对整车燃油经济性也有影响,所以将发动机最短关闭时间(cs_min_off_time)也作为优化变量。所选取的优化变量和各变量的上下限值如表2所示。
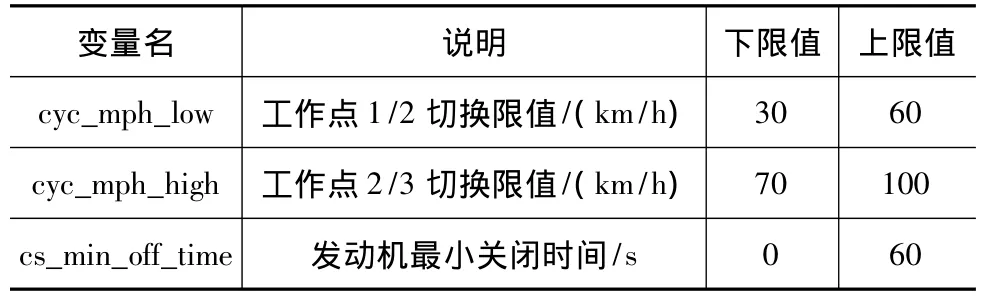
表2 优化变量
2.3 优化目标
本文中的优化目标为系统循环损失能量最小。也就是合理分配循环中的每个控制量,在整车需求功率一定的情况下,使功率源能量传递效率和制动能量回收效能综合最优。增程式纯电动车的动力源有增程器和动力电池,所以功率源能量传递效率包括增程器输出功率经过传动系驱动整车的效率和动力电池输出功率经过传动系驱动整车的效率两部分。优化目标为
式中:J为系统循环损失能量;Pfc(t)、Pbat(t)分别为发动机和电池的输出功率;Qreg(t)为单位时间制动回收能量;Pneed(t)为整车输出功率。
2.4 约束条件
约束条件为整车动力性能指标、纯电动续驶里程和电池循环寿命,其中整车动力性指标约束即动力部件应满足表3中整车最高车速、加速时间和最大爬坡度的要求,将动力性指标转化为对应的发动机和动力电池功率大小的约束,即
式中:Pneed(vmax)为最高车速时的功率需求;ηeff、ηmot分别为机械传动效率和电机效率;Pi(v)为坡度为i且车速为v时的功率需求;Tmot为电机输出转矩;io、ig分别为主减速器和变速器速比;r为车轮半径;Pfc_max和 Pbat_max分别为发动机和电池的最大输出功率。
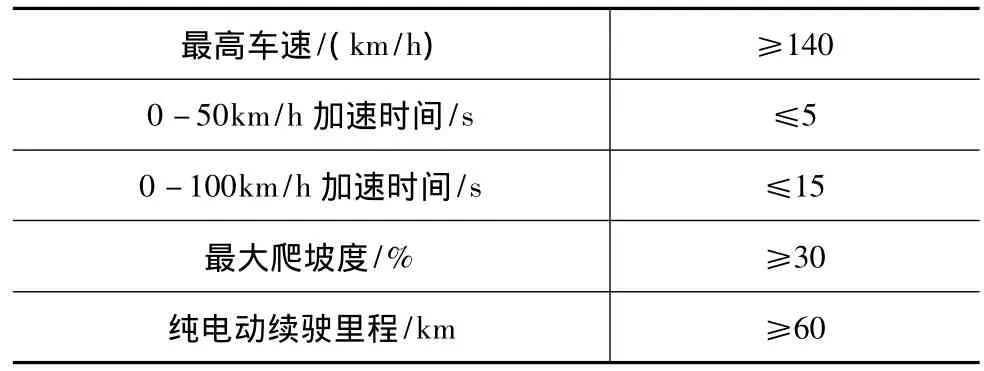
表3 约束条件
整车纯电动续驶里程约束不能通过简单的公式计算得出,须根据相应循环工况下的电池能量需求综合计算得到。而电池循环寿命约束与电池SOC使用范围息息相关,为保证一定纯电动续驶里程,电池SOC使用范围不能太窄,但电池循环寿命要求又限制了电池SOC的使用范围。
2.5 优化结果与分析
由于增程式纯电动车控制策略参数优化的非线性和复杂性,须借助仿真软件ADVISOR2002来计算整车油耗和动力性。优化过程如下:首先通过优化程序NSGA-II调用仿真软件ADVISOR2002中的增程式纯电动车整车模型,并赋初始值给优化变量,由ADVISOR2002计算出增程式纯电动车系统循环损失能量目标函数值和整车动力性能约束函数,并将值返回给NSGA-II进行约束判断,对满足约束的解进行寻优,直至寻找到最优的解集[6-7]。
增程式纯电动车运行过程中,电池的能量利用率较增程器高,所以希望电量消耗模式能够尽量长,但受电池循环寿命的影响,电池SOC的使用范围有限,本文中的优化过程主要考虑的是电量保持模式下,增程器与动力电池的能量综合利用率尽量高。
优化过程的循环工况选择NEDC工况,将增程式纯电动车控制策略参数采用NSGA-II算法进行优化。NSGA-II参数设置如下:种群规模为90,进化代数为90,优化前后单位时间电池损失能量如图5所示,优化前后发动机工作情况如图6所示,优化结果如表4所示。
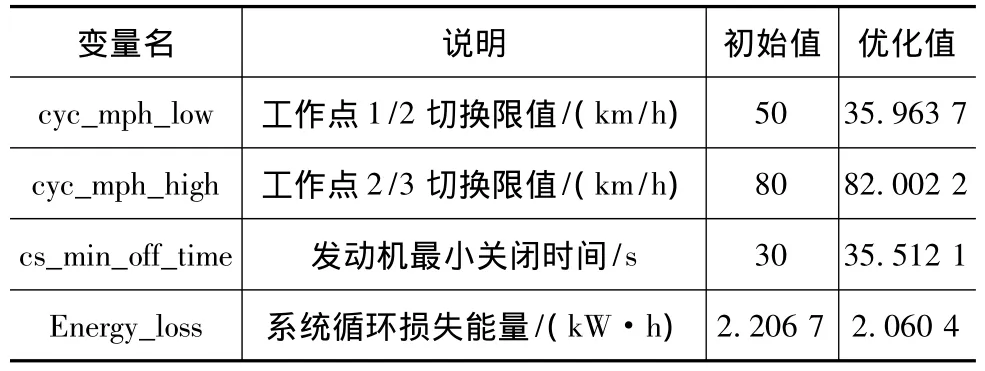
表4 优化结果
由图5可知,优化后单位时间电池损失能量虽然在局部某些地方较优化前上升,但总体而言,优化后的单位时间电池损失能量明显下降,经过计算,优化前单位时间电池平均损失能量为105.34W/h,优化后则减小到 81.94W/h,较优化前下降了22.22%,电池损失能量大为减少。这说明优化后电池能量利用率得到有效提高。
由图6可知,优化结果减小了工作点1/2切换限值(cyc_mph_low)而增大了工作点2/3切换限值(cyc_mph_high),这主要是因为发动机工作于第2个工作点的效率相对较高,优化结果增加了发动机工作于第二点的几率,这能提高发动机的工作效率,并降低系统循环损失能量,但这两个值不能过于拉大,虽然发动机工作于最优效率点,但如果动力电池组输出功率的变化范围较大,将不利于整车效率的提高。而增大发动机最小关闭时间(cs_min_off_time)主要是为避免发动机的开闭动作过于频繁,但这个值也不能过大,因为此时整车所需能量只从动力电池组获得,动力电池组必须满足整车所有的功率需求,造成动力电池有可能大电流放电,对其寿命不利。
从表4可知,在保证动力性能的前提下,整车一个NEDC循环的系统循环损失能量从优化前的2.2067kW·h下降到优化后的2.0604kW·h,降低了6.63%。由此可见,通过NSGA-II优化算法,找到了一组更好的控制参数,该优化结果是有效的,应用NSGA-II对增程式纯电动车控制策略参数进行优化切实可行。
3 结论
(1)增程式电动汽车的工作模式分为电量消耗模式和电量保持模式。其整车驱动策略的思想是使发动机工作于效率较高的3个工作点,这样既能避免在功率跟随控制策略下效率不高的缺陷;又能防止在恒温器控制策略下,当电池SOC较低时,为提供充足的功率,发动机工作点转速较高,整车噪声较大的不足。
(2)以系统循环损失能量最小为优化目标,利用带精英策略的非支配遗传基因算法,对增程式电动汽车控制策略进行优化。结果表明,所提出的优化算法可以找到一组全局优化的控制参数,整车效率得到有效提高。
[1] Hans Kemper,et al.E-Vehicles with Range Extender– Properties and Potentials[C].Aachener Kolloquium Fahrzeug-und Motorentechnik,2009:1001 -1024.
[2] Jean J Botti,M James Grieve,John A MacBain.Electric Vehicle Range Extension Using an SOFC APU[C].SAE Paper 2005 -01-1172.
[3] Tate E D,Harpster Michael O,Savagian Peter J.The Electrification of the Automobile:From Conventional Hybrid,to Plug-in Hybrids,to Extended-Range Electric Vehicles[C].SAE Paper 2008-01-0458.
[4] 刘杰.混合动力轿车用复合电源参数匹配与优化设计研究[D].长春:吉林大学汽车工程学院,2011.
[5] 高媛.非支配排序遗传算法(NSGA)的研究与应用[D].杭州:浙江大学信息科学与工程学院,2006.
[6] Hu Xiaolin,Wang Zhongfan,Liao Lianying.Multi-Objective Optimization of HEV Fuel Economy and Emissions Using Evolutionary Computation[C].SAE Paper 2004-01-1153.
[7] Gao Wenzhong,Mi Chris.Hybrid Vehicle Design Using Global Optimization Algorithms[J].Int.J.Electric and Hybrid Vehicles,2007,1(1):57 -67.
