基于模式控制的PMS在工程船舶中的应用研究
2014-09-27凌良勇
凌良勇
(长江航道局 武汉 430010)
引 言
随着工程船舶的功能日益增强,其各类负载总和越来越大,远大于主机和发电机的所能提供的船舶装机功率,二者之间形成了较大矛盾,如果不进行管理和控制,主机、发电机很容易产生超负荷甚至过载、断电、船舶失控等严重后果,给设备和船舶的安全带来严重威胁。[1-2]因此,为了降低能耗成本,提高能耗使用效率,需要提高主机和发电机在船舶各工况下功率使用效率和均衡性。由于工程船舶工况和动力负载的多样性,驱动形式复杂(复合驱动),[3]原有的传统模式已无法对其进行有效的控制与管理,必须拥有一套独立的系统,对其动力、供配电系统以及特种机械进行统一的管理与功率分配,因此产生了功率管理系统PMS(Power Management System,简称 PMS)。[4-5]
1 船舶PMS原理分析
传统的船舶PMS是狭义的PMS,即普通航行船舶的自动电站管理系统,仅具有自动电力管理的功能,相对来说是一个规模小的功率管理系统,而广义的PMS不仅是针对电力系统,同时还对动力系统、特种机械各种不同工况下的功率分配与协调。广义的功率管理,包括全船动力机电站配置、配电板选择性(保护)分析、全船供电模式与供电模式转换及功率管理策略。[6-8]
通常,自航船舶动力布置大多数采用柴油机为主推进动力、柴油发电机组为电站。然而,工程船舶有一个共同特点,即在施工作业时主推进所需要的功率远低于柴油机的额定功率,因此产生了复合驱动的概念。复合驱动指柴油机输出轴不只限于带一种负载,而是带二、三种甚至三种以上的负载。例如柴油机的飞轮端驱动螺旋桨,自由端驱动轴带发电机;或者柴油机的飞轮端通过齿轮箱驱动螺旋桨+轴带发电机,自由端通过齿轮箱带动大功率泵浦、中压发电机及其他装备等。
基于模式控制的船舶PMS根据船舶的使用工况并结合主机的复合驱动形式,将工程船舶复杂的工况模式化并划分为常用的工况模式;然后按照船舶工况模式及主机动力驱动方式确定主机推进系统动力配置模式,将船舶工况模式和主机推进系统动力配置模式有机结合,构成船舶功率管理系统的运行模式(或控制模式);进而再对相关动力装置和负载(机电设备)进行功率管理。其控制方式见图1所示,对应的控制机理如式(1)所示,具体实施流程参见图2。

图1 基于模式控制的船舶PMS示意图


图2 基于模式控制的船舶PMS实施流程图
因此,基于模式控制的船舶PMS 设计应包括以下步骤:
(1)船舶运行工况及模式分析与划分;
(2)动力配置模式分析;
(3)确定各种不同工况模式下的功率需求;
(4)配电板选择性(保护)分析;
(5)动力模式的切换;
(6)功率分配和管理策略的确定;
(7)PMS的硬件设计包括配电系统的设计、控制系统的设计;
(8)码头系泊实验、航行实验、效率实验等。
2 PMS在挖泥船中的应用
本文以长江航道局某8000 m3/h 自航耙吸挖泥船为例,剖析PMS在挖泥船中的应用。[9]
2.1 运行工况分析
该船的作业工况如表1所示。
2.2 动力配置模式分析
该船的动力配置如图3所示。
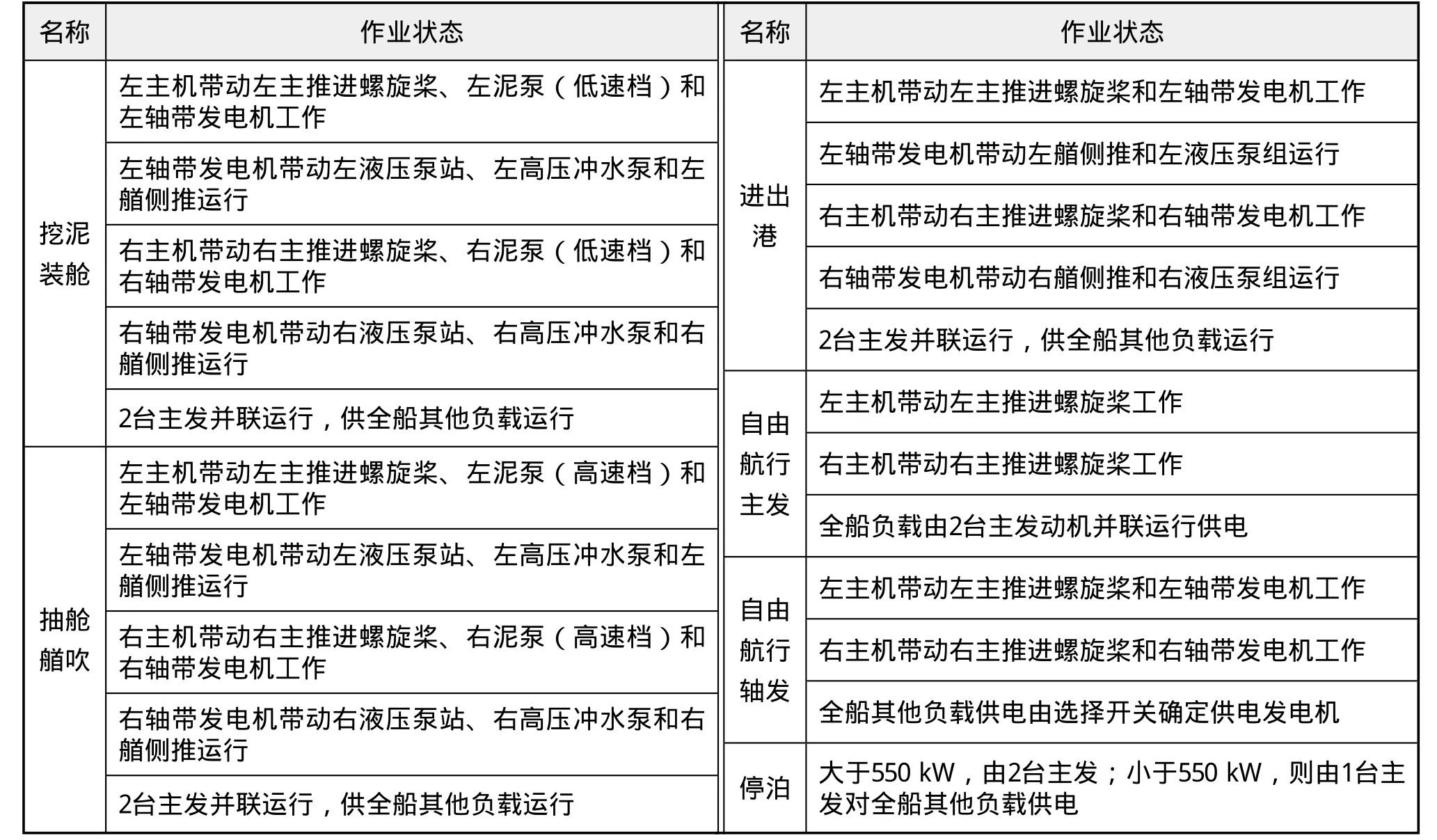
表1 8000 m3/h 自航耙吸挖泥船的作业工况
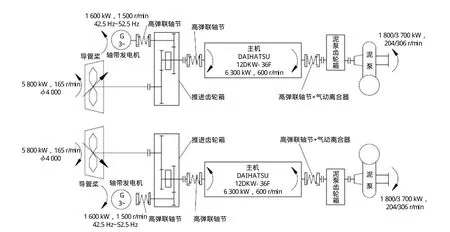
图3 8000 m3 自航耙吸挖泥船的动力配置示意图
主机采用“一拖三”的驱动方式,结合船舶工况和工作负载确定主推进系统采用以下三种动力配置模式:
(1)组合模式
主机功率用于驱动CPP,轴带发电机跟转,但不输出功率,启动离合器脱排,泥泵不工作。
(2)轴发模式
主机100%额定转速,主机功率用于驱动CPP和轴带发电机,气动离合器脱排,泥泵不工作。
(3)挖泥模式
主机功率用于驱动CPP和轴带发电机,气动离合器合排,泥泵工作。
2.3 控制模式
通过分析该船的运行工况和动力配置模式,从而确定控制模式,见图4。
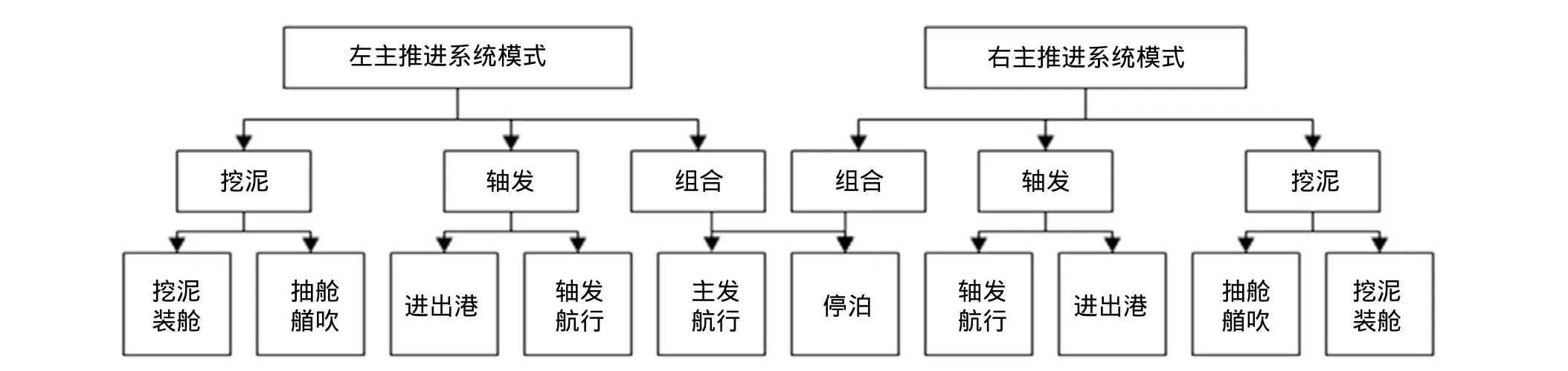
图4 8000 m3/h 自航耙吸挖泥船的控制模式示意图
2.4 基于模式控制的PMS
根据上述三种模式运行的需要,通过对主机、轴发、主发、推进齿轮箱离合器、可调螺距螺旋桨、泥泵及齿轮箱离合器、高压冲水泵以及艏侧推进行管理,建立8000 m3/h自航耙吸挖泥船的PMS,对船上用电设备进行合理分配,保证电力系统正常运行。该PMS结构示意图如图5所示。

图5 8000 m3/h 自航耙吸挖泥船的PMS结构示意图
该功率管理系统由三部分组成:
(1)功率管理模块
作为基于模式的PMS控制中枢(包括PMS的硬件、软件及接口),通过与驾驶台和主配电板的通信,进行工作模式的辨识和基于模式的功率管理。
(2)驾控台PMS控制模块
作为船舶作业模式的指挥系统,包括主推进/PMS开关、工作模式按钮和工作状态指示灯,实现工作模式的切换和管理。
(3)负载管理模块
作为船舶负载的控制中心,通过对主配电板、应急配电板和其他负载进行控制,实现负载的分配、调节、转移和过载保护。
通过建立基于模式控制的PMS,实现不同配电模式之间的转换、主配电板上主发供电故障时,任一轴带发电机自动供电(由选择开关确定轴带发电机)、管理艏侧推的问讯和分配给艏侧推运行所需功率、管理高压冲水泵的问讯和分配给高压冲水泵所需功率、泥泵离合器问讯管理、预防主机过载、预防轴带发电机过载、预防主发电机过载、实现两台主发电机自动并车和负载自动分配、任一轴发和主发之间的自动并车和自动负载转移、发电机(轴发、主发)主要运行参数监测(过载、过流、过压、欠压、过频、欠频、轴发和主发逆功保护)等。
3 控制模式实例分析
现以2台主机都正常运行为例,简述PMS在挖泥装舱模式的配电模式控制过程及要求,其配电模式见图6。
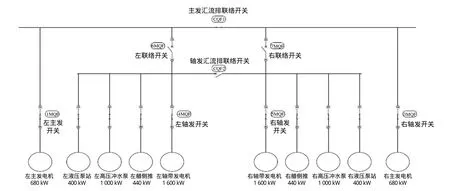
图6 挖泥装舱模式的配电示意图
PMS的功率计算采用下列公式:

式中:PME为主机功率(由主推进系统提供4~20 mA功率信号);
PCPP为主推进螺旋桨轴功率(由主推进系统提供4~20 mA轴功率信号);
PDP为泥泵功率(由PMS系统计算);
PMG为轴带发电机功率(由PMS系统测量);
PHY为液压泵站功率(由PMS系统测量);
PJP为高压冲水泵功率(由PMS系统测量);
PBT为艏侧推功率(由PMS系统测量);
ηGBDP为泥泵驱动齿轮箱效率;
ηGBPD为螺旋桨齿轮箱效率;
ηMG为轴带发电机(包括齿轮箱)的效率。
3.1 控制过程及要求
在模式切换前必须满足如下要求:主控制屏上“PMS 控制”开关在开位置,2台主发和其开关状态正常。
在切换过程中,如发生以下任一情况,将发出“配电模式切换失败”报警:
(1)在向主推进系统请求模式转换时,未转换成功。
(2)在转换过程中发生联络或发电机开关合/分闸失败。
(3)泥泵处于高速档运行。
(4)如左轴发处于图7所示的供电状态,左主推进系统处于挖泥模式且挖泥作业未结束。
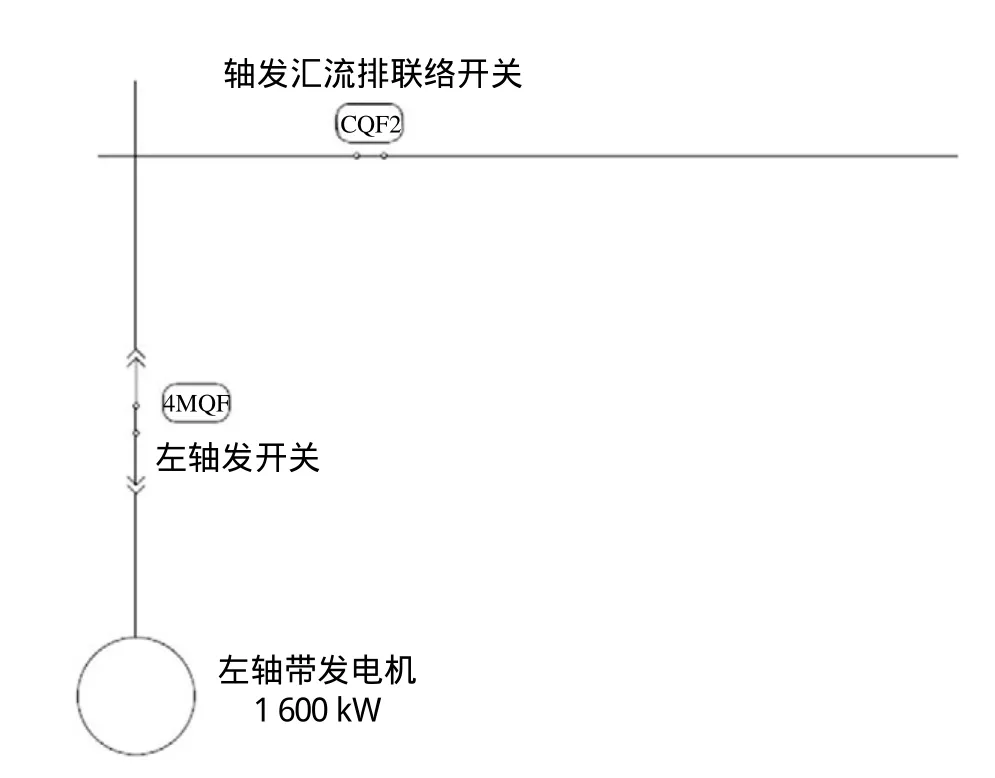
图7 左轴发供电状态(挖泥)
(5)如右轴发处于图8所示的供电状态,右主推进系统处于挖泥模式且挖泥作业未结束。

图8 右轴发供电状态(挖泥)
(6)如左轴发处于图9所示的供电状态,左主推进系统处于轴发模式且右侧推或右高压冲水泵在运行。

图9 左轴发供电状态(冲水)
(7)如右轴发处于图10所示的供电状态,右主推进系统处于轴发模式且左侧推或左高压冲水泵在运行。

图10 右轴发供电状态(冲水)
3.2 故障处理
(1)当故障导致左轴发开关跳闸,左轴发汇流排失电时,系统自动合轴发汇流排联络开关,配电模式如下页图11所示。
(2)当故障导致右轴发开关跳闸,右轴发汇流排失电时,系统自动合轴发汇流排联络开关,其配电模式与模式(1)相反。

图11 左轴发开关跳闸、左轴发汇流排失电配电模式
(3)当故障导致2台主发开关跳闸,柴油发电机汇流排失电时,在下列情况下,将申请左主推进转为轴发模式,合左联络开关,使左轴发对主发汇流供电。
① 推进系统挖泥作业已结束(左泥泵离合器脱开、左高压冲水泵停止运行、左侧推停止运行、收到左主推进系统挖泥结束信号),右主推进挖泥状态未结束。
② 主推进系统挖泥作业均结束(左右泥泵离合器脱开、左右高压冲水泵停止运行、左右侧推停止运行、收到左右主推进系统挖泥结束信号),主配电板上轴发选择开关在左轴发位置。
③ 主推进系统挖泥作业均未结束且主配电板上轴发选择开关在左轴发位置,向疏浚系统请求左主推进系统退出挖泥系统。
④ 当故障导致两台主发开关跳闸,柴油发电机发汇流排失电时,其配电模式与模式(3)相反。
4 结 论
基于模式控制的PMS在负荷需求总量远大于动力配置的装机功率情况下,通过合理划分功率管理模式,对复杂工况和关键设备的功率管理更加明晰,对船舶推进动力、船舶负荷进行合理分配和有效管理,始终将有限的动力用在最急需之处,并根据需求的变化不断调整动力供给,保证主机、发电机以及船舶的安全,最大程度地满足动力和设备的负荷需求,进一步提高船舶动力装置在各工况下的负荷均衡性、使用效率和经济性。
[1]盛卫明. 大型自航耙吸式挖泥船“新海凤”轮机概述[J].船舶,2012(1):48-54.
[2]柯常国,王劲,杨俊飞.电力推进船舶功率管理系统设计和研究[J]. 船电技术,2013(9):17-21.
[3]龚琦. 具有首冲功能的300 m3自航耙吸挖泥船疏浚系统设计[J]. 船舶,2014(2):89-93.
[4]TANG,G Q.Canada Smart grid management & visualization:Smart Power Management System[C]//20118th International Conference & Expo on Emerging Technologies for a Smarter World(CEWIT),NewYork:2011.
[5]DOLGOV A,Student Member,IEEE,et al. Power Management System for Online Low Power RF Energy Harvesting Optimization[J]. Circuits and Systems I,2010(7):1802-1811.
[6]冒如权.舰船电力系统网络结构分析[J]. 船舶,2013(2):55-59.
[7]韩旗,黄一民,张纪元,等.船舶能量管理系统技术[J].船舶工程.2009,31(增刊):102-104.
[8]田王闯,吴志良.基于PLC的船舶电站监控系统的设计[J].船电技术.2009(2):32-33.
[9]中国船级社.钢质海船入级与建造规范[S]. 2006.