新型隧道钢环安装机的设计与研究
2014-09-20
上海市基础工程集团有限公司 上海 200433
0 绪论
随着轨交通车里程的延长和运营年数的增加,轨交隧道结构的安全愈显重要,因此对于轨交已运行隧道的日常维修就显得尤为重要。为保证隧道结构的耐久性、安全性和轨交的正常运营,采取隧道内安装钢环的技术措施,对管片结构进行长期加固。维修过程中,由于施工空间狭小、大重量钢板构件难以精确定位和安装等,给隧道管片加固的质量、安全等带来了一系列难题。
钢环安装机是一种专门用来在隧道施工时对钢环进行抓取、举升以及调整钢环姿态等作业的机械设备,它可以减轻体力劳动,提高劳动生产率,在生产过程中进行某些特殊的工艺操作,实现机械化和自动化[1]。
相较于国内同类产品的少自由度,新设计的安装机械手多达9 个自由度,末端斗杆机构(安装铰)能旋转并摆动,操作更为灵活简单,可实现隧道维修全断面任意位置的安装。它具有快慢2 挡变速,有效提高了作业效率。
1 钢环安装机设计概述
1.1 钢环安装机设计要求
钢环在安装过程中需要包括2 个方面的内容:一是钢环机械手在安装钢环时,可在有抓取钢环、安装钢环等过程时,机械手臂能灵活调整抓取姿态以适应自动或人工安装;二是在适应隧道恶劣环境的同时,保证安装机械手施工过程中设备及人员的安全性。
综上所述,钢环安装机应满足以下设计要求:
(a)机械手臂应该结构紧凑,在满足强度要求下保证安全稳定性;
(b)机械手臂能够实现钢环全方位移动,实现工件的六自由度移动、任意位置就位;
(c)行走底盘要有广泛的适应性,适用于恶劣环境;
(d)安全的液压、电气操控系统;
(e)经济适用,故障率低。
1.2 总体设计方案
工程机械设计的第一步是功能规划与总体设计,通过分析工程机械的施工现状和施工特点,提出台车的设计要求和工作性能等参数。根据要实现的功能设计要求分析,规划车辆的设计方案与总体布局。
钢环安装机放置于隧道标准平板车之上,主要由底盘、钢环安装机械手和液压及电气与控制系统等部分组成,结构如图1所示。由于隧道内施工过程中环境恶劣、工作时间长,对很多主体构件受力要求较高,故伸缩臂都采用挖掘机大小臂类似的型钢板材焊接,保证整体加工的强度与精度。机械伸缩臂通过转台固定在行走底盘上。在钢环安装过程中,主要需要完成钢环的翻转、圆周运动和左右摆动等动作。考虑到钢环安装中恶劣的环境影响,本钢环安装机采用液压驱动的方式,主要分为3 个步骤:
(a)钢环安装机用挂脚将钢环抓举到安装位置;
(b)钢环安装机通过大小伸缩臂将钢环举升到一定高度,同时通过斗杆机构来调整钢环的姿态,从而将钢环由运输时的沿隧道轴线方向转动改为垂直隧道轴线方向;
(c)在钢环姿态调整好后,由安装工人安装钢环端头的连接螺栓。

图1 钢环安装机机械手结构
2 钢环安装机主要机械结构设计
2.1 底盘组件的设计
底盘主要由底盘回转机构、底盘横移机构、底盘纵移机构和底盘支撑组成。底盘横向和纵向的移动是通过导轨机构来实现的,其设计克服了轨道牵引机车只能沿轨道纵向行驶的缺陷,用油缸来纵向与横向运动的精确定位,大大节约了运行时间。底盘的支撑机构由2 个支撑脚组成,见图2。2 个支撑脚沿着隧道的径向方向布置,这样可以防止钢环安装机在施工过程中由于重心不稳而发生倾覆。支撑脚与底盘主体是通过销轴进行连接的,当施工完毕后可以将支撑脚折叠,从而可以减少钢环安装机的占地空间。

图2 底盘支撑机构伸展示意
2.2 伸缩臂的设计
伸缩臂安装在底盘上部中心位置的回转平台上,如图3所示,可以随回转平台进行转动。伸缩臂由大臂和小臂组成,通过大小臂实现活动抓手远近高低的调整。大臂采用矩形截面的箱型结构,通过连接件与底盘机构连接,大臂与底盘的铰接点位于底盘中心,在举升液压缸的作用下绕该点运动。大臂的2 个伸缩液压缸并联布置在底盘机构上,通过液压缸的作用可以实现大臂在垂直方向上0°~90°的转动。小臂与大臂相铰接,其伸缩液压缸布置在大臂的箱型结构上。小臂上部装有一个转动支架,可以为斗杆提供近360°的旋转,从而增加了末端挂脚的自由度,其回转用的液压马达与底盘用的液压马达形式是一样的。

图3 伸缩臂结构
2.3 斗杆机构的设计
斗杆机构的设计是本安装机的一大亮点,其巧妙的结构设计不仅可以增加安装机的伸长范围,还增加了末端挂脚的摆动范围。斗杆机构安装于小臂上部的转架之上,并可随转架绕小臂轴线方向作360°旋转。
斗杆机构(图4)由斗杆油缸、斗杆箱体、小脚油缸一、小脚油缸二和挂脚组成。斗杆箱体铰接在小臂上部的转架上,在斗杆油缸的作用下绕该铰接点转动60°。其设计能使机械手在有限的空间内微调钢环片的位态。挂脚通过2个小脚油缸与斗杆箱相连,其中小脚油缸二被约束在箱体内,只能沿其轴线作伸缩运动,而小脚油缸一有2 个自由度,即绕斗杆箱的转动和沿油缸轴线的伸缩运动。在小脚油缸一和二的配合作用下,挂脚可以完成-65°~60°范围内的旋转。

图4 斗杆机构
3 钢环安装机机构自由度计算
钢环安装机的机构简图如图5所示,结构简图将底盘回转副和小臂上部的转架回转副均简化成转动副,从而巧妙地将空间机构转化成平面机构。为了能够正确算出机构的空间自由度,本文采用欧阳富等[2]提出的空间机构自由度计算公式,其表达式为:

式中:W——空间机构的自由度;
P——空间机构运动副自由度总数;
λ——空间机构运动副的多余自由度数目;
3——空间机构每个封闭环的约束数,或者说它是独立位移方程数及条件约束数;
N——空间机构的封闭环数。
由图5可知,安装机的运动副自由度总数为26,其中包括14 个转动副,2 个移动副和5 个圆柱副。转动副和移动副均只提供1 个自由度,圆柱副则提供2 个自由度。运动副多余自由度数目为5,机构中的圆柱副可以提供移动和转动2 个自由度,其中转动自由度是多余的。空间机构的封闭环数为4,其中大臂油缸、小臂油缸和斗杆油缸各组成1 个封闭环,2 个小脚油缸组成1 个封闭环。将以上数据带入自由度计算公式可知:

因此,钢环安装机的自由度为9,这也与机构的驱动器数是相符的。对于三维空间中的任一刚体,其位姿必须由6 个参数才能确定,因此6自由度是具有完整空间定位能力的机器人最小的自由度数。
本文中的钢环安装机有9个自由度,从而增加了安装机末端的灵活性和避障能力,改善了安装机的运动学和动力学特性。

图5 安装机机构
4 钢环安装机的工作空间
工作空间是指机器人臂杆末端关节坐标系原点在一定条件下所能达到空间的位置集合。工作空间的形状和大小反映了机器人的活动范围,是衡量机器人工作能力的一个重要的运动学指标[3]。
使用蒙特卡洛法求解机械手工作空间关键在于机械手各关节在相应取值范围内工作,当所有关节在取值范围内随机遍历取值后,得到的末端点的集合就构成了机械手的工作空间。由蒙特卡洛法可以得出钢环安装机在隧道径向的工作空间如图6所示。
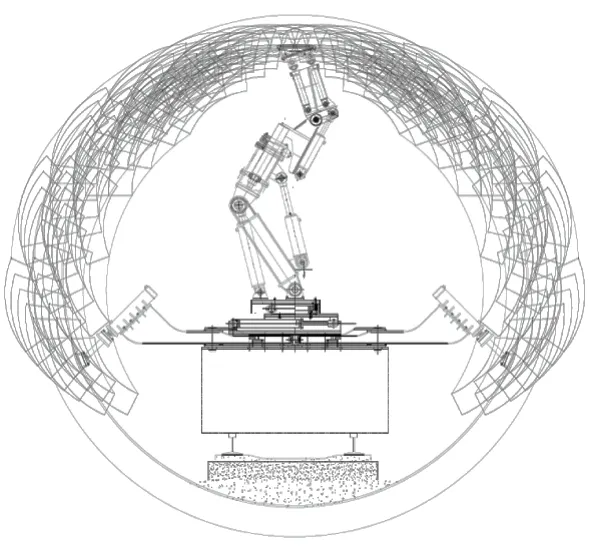
图6 钢环安装机在隧道径向的工作空间
5 结语
本文主要对钢环安装机的各个组成结构进行了阐述,计算出其自由度,并利用蒙特卡洛法描绘出了钢环安装机在隧道径向操作的工作空间,为安装机的实际操作提供了理论依据。通过上述研究,经过上海轨交10号线新江湾城至殷高东路站隧道整修工程实际运作,满足了管片加固中钢环安装的精确度等要求,为整修工程的顺利完成打下了扎实基础。
