无人机光传飞控系统技术研究*
2014-09-20彭永涛樊战旗
彭永涛,刘 林,樊战旗
(1西安飞行自动控制研究所,西安 710065;2飞行器控制一体化技术国防科技重点实验室,西安 710065)
0 引言
光传飞行控制系统(fly-by-light)是使用光传技术实现飞机飞行控制功能的系统。相比电传控制系统,光传控制系统可以有效防御干扰和电磁冲击,并具有体积小、重量轻、传输容量大等优点,从而提高了飞行控制系统的可靠性,大大改善了飞机的操纵品质。当前国外对光传飞控系统的研究已进入实际应用阶段,开始采用数字光传、光传数据总线等先进技术。国内对光传飞控系统的研究基本停留在实验室光纤信号传输研究阶段,技术成熟度基本处于TRL3。
文中通过对光传飞控系统技术的研究,实践光传飞控系统顶层设计技术,形成面向工程化、产品化的光传飞行控制系统的体系结构、余度管理、光总线网络管理、部件设计等相关领域的设计技术基础,建立了开放式可扩展的光传飞控系统试验验证平台,并基于某无人机模型完成了系统地面综合验证试验,推动了国内光传飞行控制系统的技术成熟度(TRL4),加速了光传系统的产品化,为后续光传系统的技术开发和工程应用奠定了坚实基础。
1 系统方案
文中设计的无人机光传飞控系统采用多节点分布式双余度结构,为全时限、全权限三轴自动飞行控制系统,具备自动驾驶仪、飞行管理、余度管理、系统自检测、飞行参数记录等功能。
系统包括了计算机分系统、伺服作动分系统、传感器分系统。计算机分系统包括飞行控制与管理计算机、光接口适配计算机、光组件接口适配计算机;伺服作动分系统包括机电式作动器和数字式舵机控制器;传感器分系统包括导航系统、无线电高度表、大气数据系统、GPS等。飞行控制与管理计算机、光接口适配计算机、光组件接口适配计算机、数字式舵机控制器采用双余度配置;各电动舵机采用电气二余度、机械单余度配置;光位移传感器集成在节风门舵机中,采用双余度配置。
系统软件包括操作系统软件、应用软件和飞行支持软件。操作系统软件包括I/O、数据转换、中断处理、任务调度软件;应用软件包括控制律软件、余度管理软件、飞行管理软件和BIT软件;飞行支持软件包括地面检测软件、飞行参数记录与处理软件。系统采用基于1394B总线协议的双余度光总线,总线传输带宽为400 Mbps。飞行控制与管理计算机、接口适配计算机以及3个舵机控制器之间通过光总线连接。系统组成结构如图1所示。

图1 光传飞控系统组成结构
1.1 光总线
光传系统采用符合AS5643军用规范的1394B总线,双余度配置,总线传输带宽为400 Mbps。飞行控制与管理计算机、舵机控制器、接口适配计算机均作为总线上的节点挂接在1394B总线上,所有挂接在光总线上部件的通信都通过该总线完成。飞行控制与管理计算机作为1394B光总线的主控制器,负责整个光总线的管理,所有的1394B总线配置为环路用以提供冗余,当一条光纤失效后,总线通信仍能保证。
光传系统采用基于异步流包传输的分布式构架实现1394B总线在飞控系统中的应用,并对1394B协议进行了相应扩展以增强其实时性、可靠性。光传系统采用的双总线主备式工作机制,降低了系统各部件逻辑耦合程度,增强了系统容错能力,可扩展性强。
1.2 飞行控制与管理计算机
飞行控制与管理计算机作为无人机光传飞控系统的核心,需要完成航线装订和编辑、自动导引、控制律解算、飞行模态控制与转换、数据采集、余度管理、故障检测与处理、伺服控制指令输出等任务,因此计算机系统需要具有高速运算能力和较高的运算精度。
飞行控制与管理计算机采用处理器和接口双余度配置,两个余度的所有资源均挂接在背板总线上。背板总线采用满足时间触发协议的双余度自监控串行1394B光背板总线,总线传输速率为400 Mbps。飞行控制与管理计算机内部包括两块处理器/总线管理板和两块总线接口/数据记录板,各功能板均为智能节点含有处理器或微控制器,对功能板上的信号进行调理和监控,节点间以数字量的方式通过串行背板总线进行传输。
1.3 接口适配计算机
接口适配计算机采用双余度配置,主要实现所有与飞行控制与管理计算机相连设备的各种信号和1394B光总线信号相互转换,以满足双余度无人机光传飞控系统的要求。
1.4 舵机控制器
无人机光传飞控系统共包括3个舵机控制器,通过1394B光总线接口完成与飞行控制与管理计算机的信息交互,实现对各电动舵机的控制。舵机控制器通过1394B光总线接收飞行控制与管理计算机对于舵面和发动机节风门的数字控制指令,经过处理后驱动其操纵机构,使舵面和节风门进行相应的偏转。同时舵机控制器将采集到的各个舵机的状态信息通过1394B光总线发送给飞行控制与管理计算机。舵机控制器1用于控制升降舵机和方向舵机,舵机控制器2用于控制副翼舵机和前轮舵机,舵机控制器3用于控制发动机节风门舵机。
1.5 电动舵机
升降舵、方向舵、副翼、前轮舵机均采用直流无刷电动舵机,PWM工作方式,采用双电机共输出轴的方式。节风门舵机为含波长编码光信号位移传感器的一体化数字伺服舵机,其工作方式与其它4个舵机相同,光位移传感器完成节风门舵机的位置采集。在舵机控制器的控制下,5个电动舵机对计算机的指令进行精确跟随。
1.6 光组件适配计算机
光组件适配计算机采用双余度配置,包括白光光源、光谱解调仪及光信号角度处理计算机三大部分,实现了光信号从输入到数字角度信号输出所需设备的集成,该机箱采用最短光路传输设计,减少了光信号衰减。
文中所用的光位移传感器为波长编码光位移传感器,是基于衍射光栅的光强分布特性设计而成的一种传感器,衍射型波长编码位移传感器的工作原理如图2所示。光传感器在光传飞控系统中用于测量节风门舵机的位置,在节风门舵机运动过程中,光组件适配计算机通过光路接收到光位移传感器的位置信息后,通过光谱解调仪和光信号处理计算机将位移信号处理成数字信号,并通过RS422串口将其发送给舵机控制器用于伺服回路控制。
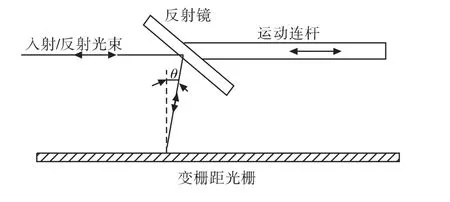
图2 衍射型波长编码位移传感器工作原理图
2 系统综合试验验证
建立了一套用于验证双余度光传飞控系统的试验环境,以进行光传飞控系统的开环试验、闭环试验和半物理综合试验。整个试验环境以计算机、仿真资源、检测资源为核心,包括系统综合测试仿真设备、机载仿真设备、视景仿真设备、系统加载调试设备等。试验环境组成与交联关系如图3所示。
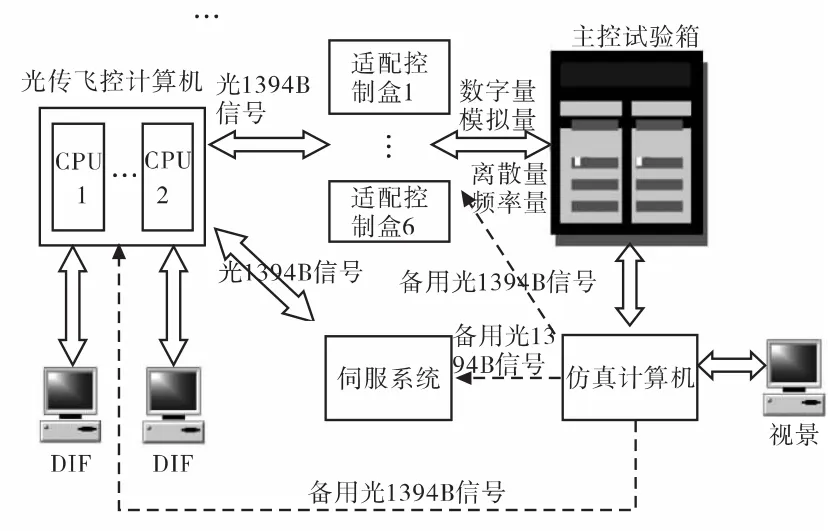
图3 试验环境组成和交联关系
以某无人机为控制对象,完成了光传飞控系统的开环综合试验、闭环综合试验、半物理仿真试验。在无人机光传飞控系统综合试验验证过程中,飞行控制与管理计算机、伺服系统(电动舵机和舵机控制器)、接口适配计算机、光位移传感器、光组件适配计算机均采用实物样机,传感器与无人机通过数学仿真实现,完成了从起飞、航线飞行、进场着陆的全过程自动飞行控制。
3 试验结果分析
完成了无人机光传飞控系统的地面综合试验,利用开发的软件对飞行数据进行了记录与分析。图4是光传系统的无人机起飞阶段的俯仰角、无线电高度、发动机节风门舵机位置、飞机空速、升降舵舵机位置、副翼舵机位置,其中ins-THAER表示俯仰角,RH表示无线电高度,dtp表示节风门舵机位置,ins-V表示飞机空速,dtz表示升降舵舵机位置,dtx表示副翼舵机位置。图5是电传系统的无人机起飞阶段的俯仰角、无线电高度、发动机节风门舵机位置、飞机空速、升降舵舵机位置、副翼舵机位置。通过对比可以看到,光传飞控系统与电传飞控系统的飞行指令几乎完全一致,开发实现的光传飞控系统的性能达到了该无人机电传控制系统的设计要求。

图4 光传飞控系统试验数据曲线
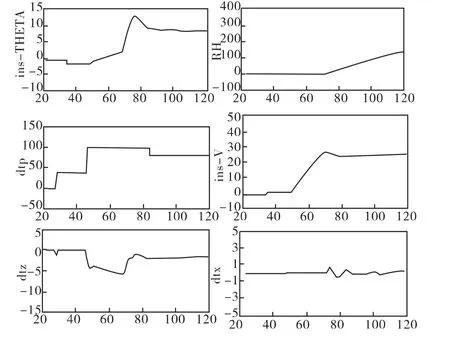
图5 电传飞控系统试验数据曲线
4 结论
文中设计实现的双余度光传飞控系统基于IEEE-1394B总线协议的开放式系统结构,具备很强的功能扩展性和高带宽信息传输能力。完成了双余度光传飞控系统的系统架构设计、部件研制和地面综合试验验证,突破了分布式余度光传飞控系统架构设计及验证、双余度高带宽光传数据总线传输及总线结构管理、光传飞控系统工程样机设计与实现等技术难题,设计了光传飞控系统研制流程与规范。通过实践无人机光传飞控系统顶层设计技术,形成了光传飞控系统的体系结构、余度管理、网络管理、部件设计、系统综合、试验验证等相关领域的技术基础。
为了推动光传飞控系统的工程化水平,后续需要进一步开展光传飞控系统工程化实现和验证方法的研究;继续开展光传系统环境适应性的研究,包括未来先进战机的使用环境条件;开展基于分布式体系架构的光传飞控系统技术研究,形成通用的分布式光传飞控系统试验验证平台。
[1]Todd JR.A review of the fly-by-light optical Aileron trim flight demonstration system [C]//SPIE,1998,Vol.3541:176-178.
[2]Robert Gargano.Fly-by-light optical bus interface module(OBIM)[C]//SPIE,1995,Vol.2467:150 -159.
[3]Kevin C Scholten.Fiber optic gyro inertialmeasurement unit for fly-by-light advanced systems hardware[C]//SPIE Vol.2292,2003.
[4]李玉飞,苏媛.光传飞行控制系统研究[J].航空科学技术,2009(3):7 -11.
[5]李昆,王少萍.光传飞控系统的发展趋势[J].北京航空航天大学学报,2003,29(12):1068 -1072.
[6]郭锁凤,申功璋,吴成富.先进飞行控制系统[M].北京:国防工业出版社,2003.
