基于M L-PDA算法的低可见目标跟踪研究*
2014-09-20齐立峰惠小平
齐立峰,惠小平
(空军工程大学防空反导学院,西安 710051)
0 引言
使用测量扫描集作为一批的ML-PDA方法的一个困难是,对一些连续扫描而言,当目标不在侦察区域中出现时,非正式扫描的合并。例如,第一次的几个扫描后,如果目标出现在传感器的侦察区域中时,评估器能被那些扫描中的纯混乱所误导——早前些的扫描包含不相关信息,合并这些信息不但增加处理的数量(不增加任何更多的信息),而且导致更不精确的评估或者连航迹都拒绝。而且,一个目标不能在跟踪时从侦察区域消失一会儿后来又出现。此外,这些干涉扫描包含很少或根本没有关于目标的信息,而且能潜在的误导跟踪器[1]。
此外,标准ML-PDA评估器假定整个跟踪过程中的目标SNR、目标速度和误报密度保持常量。实际上,这不可能是真实情况,标准ML-PDA评估器不会产生期望的结果[2]。例如,平均目标SNR在目标靠近或远离传感器时可能会发生重大的变化。此外,目标可能随着时间间歇性的改变其进程和/或速度。对于光电传感器,依赖于时间和天气,误报数目也可能不同。

图1 F1幻想序列重的最后一帧
由于这些关系,需要一个具有处理时变SNR(具有在线适应)、误报密度和缓慢演进过程与速度的评估器。当一个类似于IMM-PDA的递归评估器是一个候选时,为了在严重嘈杂环境下的低SNR条件中操作,评估器是首选。因此,通过引用适应性的以可调窗口方式使用AI的ML-PDA评估器来阐述上述问题,而不是像标准ML-PDA评估器那样单批使用所有测量。这一可调窗口的初始时间和长度是基于窗口中的测量信息内容来适应性调整的。这样,带有少量或没有信息内容的扫描被消除,窗口移动到具有“提供信息的”测量扫描上。
这一算法在目标临时消失后又出现时也有效。与之相比,递归算法会在这种情况下产生分歧,可能需要一个高性价比的跟踪重初始化[3]。标准评估器将会遗忘消失,并可能丢失整个航迹。这一节展示了严重嘈杂环境中真实场景下的使用光电(EO)传感器跟踪快速移动航行器的适应性可调窗口ML-PDA评估器的性能。
1 场景描述
适应性ML-PDA算法在一个由Laptex数据收集过程中收集的长波红外(longwave infrared,LWIR)IR的78帧数据组成的实际场景下被测试,它发生在1996年7月希腊的克利特岛。这一序列包含一个单独的目标——一个快速移动的幻影F1喷气式战斗机。这个以1 Hz速率获取的920×480像素帧,被注册来补偿帧与帧之间的视线(line-of-sight,LOS)抖动。图1展示了F1幻影序列中的最后一帧。
处理过程最后获得的幻影F1序列的抽样探测列表如图2所示。图中的每一个“x”代表了一个超过阈值的探测。

图2 对应于图1中帧的探测序列
2 M L-PDA评估器公式
2.1 目标模型
ML-PDA跟踪算法用于数据预处理后期阶段的探测列表。假设时刻t=t1,t2,…,tn处存在n个探测列表。第i个探测列表,这里1≤i≤n,由沿X和Y方向的点位置(xij,yij)处的mi探测所组成[4]。除了这些位置,在第i个列表中的第j个探测的信号强度或振幅aij,这里1≤i≤m,也是已知的。这样,假设一些扫描上的常速度,这一问题能够作为空间中的二维场景而公式化,目标运动定义为四维向量为:

式中,ξ(t0)和η(t0)分别是目标的水平和垂直像素位置,形成了参考时刻t0的原点。沿这些方向的对应速度假定为常量,分别为ξ(t0)像素 /s和η(t0)像素 /s。
时刻ti列表i内的测试集表示为

这里,mi是ti时刻的测量数目。测量向量zj(i)表示为:

其中,xij和yij分别是观察的X和Y位置。
在扫描t1通过t–n所作的测量累积集通过下式给出。

测量或者源于真实目标,或者源于伪造源。前一种情况下,每个测量假定为仅在每一扫描中以探测概率PD被接收一次,并被零和附加的已知变量的高斯噪音所占用[5],即:

这里,εij和vij分别是带有沿X和Y方向的变量σ21和σ22的零和高斯噪音分量。
这样,位置分量zij的联合概率密度函数以如下方式给出:

误报假设在侦察区域中均匀分布,它们的任何即时采样数目遵循高斯概率群函数:

式中:U是监督区域,λ是这一区域的每单位误报期望数。Kirubarajan和Bar-Shalom已经展示了能够通过使用评估过程自身中的接收信号的振幅信息(AI),并结合门限阈值来提高ML-PDA评估器的性能。信号传过匹配的滤波器后,能使用封装探测器来获得信号的振幅信息。匹配滤波器的噪音假设为窄带高斯。当它通过封装探测器来反馈时,输出为Rayleigh分布[6]。给定探测阈值τ,探测概率PD,则误报概率PFA是:


阈值探测器输出的概率密度函数,对应于从目标和误报得到的信号,分别通过ρτ1(a)和pto(a)来表示。振幅相似率ρ,能够写为:

这里τ是探测阈值。
2.2 最大似然概率数据关联评估器
这一节关注于结合PDA方法的最大似然评估器。如果ti时刻存在mi个探测器,有互斥和穷举事件,对应于上述事件测量的pdf,能够写为:

使用全概率理论:

为了获得相似率,Φ|Z(i),x|,在 ti时刻,使用p[Z(i)|∑0(i),x]分解方程(13):

假设不同即时抽样的测量条件无关,即:

整个数据集的总相似概率通过下式给出:

然后,总日志-似然率Φ|Zn,x|,以在抽样时间tj的单个日志 -似然率Φ|Z(i),x|的方式来表达,变成:

最大似然估计(MLE)是通过寻找最大化方程式(17)中给出的总日志-似然率向量x=x^来获得的。使用一种quasi-Newton(变度量)的方法产生这一最大值。这也能通过最小化负日志-似然函数来完成[8]。在实现MLE中,使用了可变度量方法的Davidon-Fletcher-Powell变量。这一方法是一种函数迭代寻找最小值的变化梯度技术。然而,负日志-似然函数可能具有几个局部最小,即,它有多种模式。由于这一性质,如果搜索初始化距离全局最小太远,这一先行搜索算法可能会收敛到一个局部最小。为了弥补这一缺点,参考文献[7]中使用了一个多通道方法。
3 M L-PDA算法适应性分析
通常,测量过程在目标可见之前开始,即目标在传感器开始记录测量后的某个时刻进入传感器的侦察区域。而且,目标可能在重新出现的一个特定时间段内从侦察区域中消失。在这些中断周期内,接收的测量仅是纯粹的噪音,数据扫描不包含关于跟踪中目标的任何信息。合并这些扫描到跟踪器中减少了它的精确度和效率。这样,检测和拒绝这些扫描对于确保评估器的真实度是重要的。这一节介绍了一种以可调窗口方式使用ML-PDA算法的方法。这种情况下,算法一次仅使用数据的一个子集,而不是一次使用所有的帧来估计没有目标的扫描的使用。初始时间和可调窗口长度基于数据信息内容来进行适应性的调整——需要标识目标的最小窗口,因而最少数目的扫描,被随时在线决定和调整[9]。
适应性ML-PDA评估器中的关键步骤如下:
1)以最小窗口尺寸开始。
2)在这一窗口中运行ML-PDA评估器并对评估执行有效测试。
3)如果评估被接受(即,测试通过),并且如果窗口是最小尺寸,接受这一窗口。下一窗口是前进一个扫描的当前窗口。转到第2)步。
4)如果评估被接受,并且如果窗口大于最小值,通过移除初始扫描来尝试一个更短的窗口。转到第2)步,并仅当评估优于前一窗口时才接受这一窗口。
5)如果测试失败并且窗口是最小尺寸,增加窗口长度来包含多于一个的测量扫描,并增加窗口中的信息内容。转到第2)步。
6)如果测试失败并且窗口大于最小尺寸,消除第一个扫描,它可能仅包含纯粹的噪音。转到第2)步。
7)使用了所有的扫描后停止。
为规范评估器中的确切步骤,定义下列变量:

为了举例说明这种适应性算法,考虑一个探测器在侦察区域中记录十条测量扫描的场景。然而,目标仅在第二次扫描后(即,从第三次扫描向前)出现在这一区域中(即,其密度超过阈值)。这个例子在图3中阐明。前两个扫描是无用的,因为它们仅包含噪音。
考虑一个探测需要的最小窗口尺寸为5。然后,算法如图4的方式演化。首先,出于说明的原因,假设数据集中出现的一个单一的“噪音”扫描足以引起MLE对于航迹接受的假设测试失效。如果没有进行航迹探测,算法尝试扩展窗口以包含一个额外的扫描。这是可行的,因为额外的数据扫描可能带来足够的附加信息来探测目标轨迹。算法接下来尝试通过移除初始扫描来削减窗口尺寸。这是通过检查是否在没有这一扫描的情况下能获得一个更好的估计来完成的。如果这一初始扫描仅是噪音,它会减弱估计的精确性。如果发现了一个不带这一扫描的更好的估计(即,一个更精确的估计),后者被消除。这样,如同上例中所给出的,基于有效验证,算法在前面扩展(使用最近扫描)并在窗口后面缩减来寻找产生最强有力的探测的最佳窗口。

图3 带有观测过程中仅在部分时间内出现的一个目标的场景
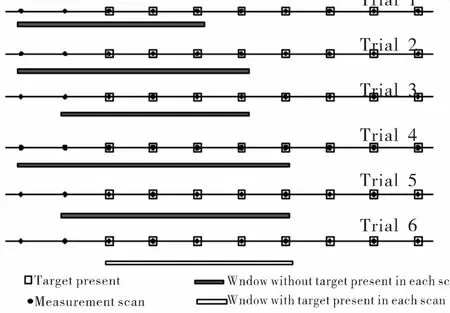
图4 应用于上述场景的适应性ML-PDA算法
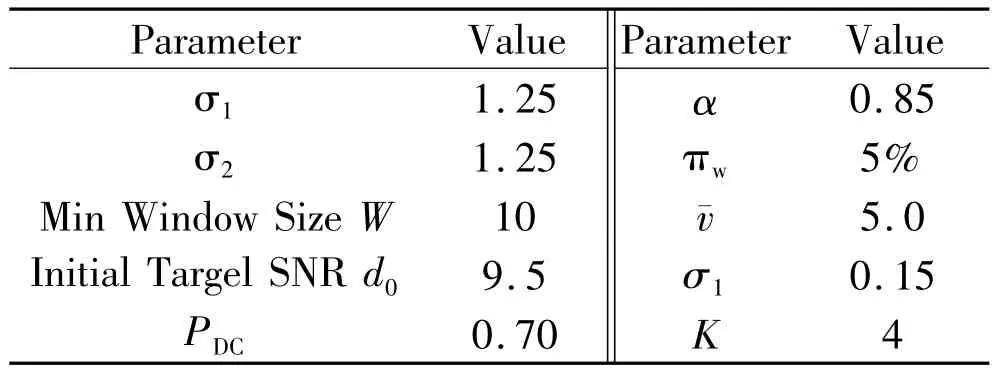
表1 F1幻影战机的M L-PDA算法中使用的参数
4 仿真分析
4.1 评估结果
幻影F1数据集由78个扫描或LWIR IR数据帧所组成。目标在这一场景中晚些出现并向传感器移动。每帧大约有600个探测。这一实现中,选择表1中所示的参数。
这些参数的选择解释如下:
·σ1和σ2,和方程(17)中一样,是分别沿水平和垂直轴上的标准偏差。两个变量以1.25的值模仿了预处理的结果。
·最小窗口尺寸Wmin,选为10。如果目标在10帧中没有探测到,算法将扩展这一窗口。初始时使用一个更短的窗口,但评估似乎不稳定。因而,假定少于10个的扫描在产生一个精确的估计时是缺乏效率的。
·初始目标 SNR,d0,选择为9.5 dB,因为这些帧上的所有探测的平均SNR近似为9.0 dB。然而,大多数帧中的随机尖峰信号被记录。第一帧中,目标不可能出现,单个15.0 dB的尖峰信号被记录到。然而,这些尖峰信号不能也不应该作为目标SNR被模拟。
·选择一个常概率为0.7的探测(PDC)。过高的值将会降低探测阈值,增加PFA。
·α是用于更新带有一个α滤波器的被估计目标SNR的参数。为探测随时接近探测器并导致出现偶然噪音尖峰信号的远程目标选择高值。这样,估计的SNR更少于依赖源于一个噪音源的探测,并为将来测试设置过高的障碍。
·πm是遗漏概率。
·优化算法的多通方法中通道K的数目选为4。

图5 展示探测窗口的算法进展
图5进一步阐明了通过描述目标探测窗口的探测过程。
综上所述,注意如下问题:
·第一个探测使用了22个扫描并在扫描28上出现。其出现是由于目标在侦察帧中出现得晚时初始扫描具有衰弱信息内容。IMM-MHT算法一次探测需要38次扫描,而IMMPDA需要39次扫描。一些伪造探测在早期探测中被关注,但被拒绝。
·下几个探测窗口产生类似的目标估计。这是这些窗口中的大量扫描自己重复的结果。
·初始探测后,在扫描数目中存在一个“跳跃”,这里进行一次探测。另外,特别是速度估计趋于恶化。这预示,或者目标从侦察区域中突然消失(变得不可见),或者目标处于机动状态。
·从扫描44向前,算法稳定于下几个窗口。然而,在扫描52,探测窗口中存在另一个跳跃。如上所述,这后面也跟随一个评估目标SNR中的下降。无论如何,这指示算法能够自我调整并在目标瞬间不可见后重新开始。递归算法在这种情况下会产生分歧。
·从54个扫描向前,如评估所示,算法稳定。而且,对每一个增加窗口做出探测,因为目标更加靠近探测器,因而,可见度更高。这通过扫描54后评估目标SNR的急速增长被注意到。
·上述结果提供了一个目标行为的理解。结果暗示幻影F1战机在侦察区域中出现得晚,并移向探测器。然而,最初时它仍然完全不可见并可能正在机动。当其靠近传感器时,它变得越来越可见,并因而易于探测。
4.2 计算负载
在运行于550MHzPentium® III处理器上,处理幻影F1的78次扫描数据,适应性ML-PDA跟踪器用时442 s,包括数据输入/输出时间。转换为大约每帧5.67 s,包括数据输入/输出时间。一个专用处理器上的更有效的实现能使得算法在一个类似的处理器上实时可用。而且,通过并行化初始栅格搜索,这需要超过90%的时间,适应性ML-PDA评估器甚至能够更有效。
5 结论
传统算法难以对低空目标进行有效跟踪,因此需要一个具有处理时变SNR(具有在线适应)、误报密度和缓慢演进过程和速度的评估器。通过引用适应性以可调窗口方式的ML-PDA评估器来解决上述问题,然后对该模型进行了深入分析,最后通过计算机仿真对该模型进行了验证。结果表明:ML-PDA滤波算法对低空目标跟踪十分有效,并且提高了滤波实时性,具有较好的工程应用前景。
[1]刘同明,夏祖勋,解洪成.数据融合技术及其应用[M].北京:国防工业出版社,1998.
[2]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991.
[3]敬忠良.神经网络跟踪理论及其应[M].北京:国防工业出版社,1997.
[4]韩崇昭,朱洪艳,段战胜.多源信息融合[M].北京:清华大学出版社,2006.
[5]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].2版.北京:电子工业出社,2006.
[6]Bar-Shalom Y.Multitarget-multisensor tracking:Advanced applications Vol.I[M].Artech HouseInc.,1998.
[7]Feo M,Graziano A,Miglioli R,et al.IMMJPDA vs.MHT and Kalman filter with NN correlation:Performance comparison[J].IEE Proc.on Radar,Sonar and Navigation 1997,144(2):49 -56.
[8]Kirubarajan T,Bar-Shalom Y,Blair W D,et al.IMMPDA solution to benchmark for radar resource allocation and tracking in the presence of ECM[J].IEEE Trans.Aerospace and Electronic Systems,1998,34(3):1023 -1036.
[9]Lerro D,and Bar-Shalom Y.Interacting multiple model tracking with target amplitude feature[J].IEEE Trans.Aerospace and Electronic Systems,1993,29(2):494-509.
