天基拦截器过渡轨道优化研究
2014-09-17高浩张科王佩
高浩, 张科, 王佩
(西北工业大学 航天学院, 陕西 西安 710072)
0 引言
天基拦截器的概念是随着实施空间攻防对抗、空天作战的要求而提出的,主要针对弹道导弹、临近空间飞行器等高超声速目标进行拦截打击。具有快速进入、精确接近、高度自主、大范围机动等特点,且发射不受领空、领土的限制,能有效适应多种作战任务需求,反应速度快,生存能力强[1]。典型的高超声速飞行器均具有5倍声速以上的飞行速度。当预警卫星发现来袭目标时,天基拦截器必须迅速机动变轨再入,对目标进行拦截。在整个拦截过程中,过渡段将耗费大量时间,因而必须对过渡段弹道进行优化研究,以满足快速拦截要求。
天基拦截器的过渡轨道优化设计的实质是寻找一条使性能指标最优并满足路径约束的飞行轨迹,即轨迹优化问题。考虑轨道优化间接法求解的精度较高,但基于极小值原理推导最优解的过程较为复杂和繁琐,求解两点边值问题时的收敛域很小。而直接法不需要推导一阶最优性条件,收敛域相对于间接法更宽广,对初值估计精度要求不高,不需要猜测协调变量的初值,但直接法容易收敛到局部最优[2]。因此,综合考虑轨道优化直接和间接算法的优缺点,本文采用组合优化算法以确保算法收敛到全局最优的同时满足速度、精度要求,获取时间最短的转移轨道。
1 轨道动力学模型
将拦截器视为质点,基于冲量理论及二体问题假设建立拦截器惯性坐标系下过渡段无量纲化运动模型[3]:
(1)
式中,vr为法向速度;vt为切向速度;r为中心引力体到飞行器矢径;F为发动机推力;u为推力与当地水平方向夹角,推力在水平方向之上为正;ρ为极角;ve为燃料喷射速度;对于终端时刻tf未定情况,令t=τp(τ∈[0,1],p=tf)。
飞行器在再入段过程中采用“弹道-升力式”返回,得出升力式再入飞行器高超声速再入大气的运动学方程[4]如下:
(2)
式中,r为地心到飞行器质心的距离;v为速度;γ为飞行路径角;θ为经度;ψ为航向角;φ为纬度;σ为速度倾斜角。
2 最优控制问题描述
在过渡段飞行过程中,拦截器在方向可控的固定推力发动机作用下再入大气层,以发动机推力方向角u作为控制变量建立系统最优控制模型。根据庞特里亚金极大值原理将打击轨道的最优控制问题转化为两点边值问题。
对最短过渡时间问题,性能指标为:
J=tf
(3)
设飞行器初始轨道为圆轨道,再入点位置和速度给定,则初始条件为:
x(t0)=[vr(t0),vt(t0),r(t0),θ(t0),m(t0)]T
(4)
对应终端约束:
(5)
构造哈密尔顿函数:
(6)
由极小值条件∂H/∂u=0,∂2H/∂u2>0可得:
(7)
根据极大值原理可得归一化后的协态变量方程为:
(8)
由于协态方程(8)关于协态变量的微分方程是线性齐次的,因此,有一个协态变量的初值可以任意确定,不失一般性,假设λm(t0)=1,且λθ≡0,这样还有三个协态变量的初值λvr(t0),λvt(t0),λr(t0)和时间参数p未知,与式(5)中4个约束条件构成两点边值问题,这样连续推力最优变轨问题就变成寻求两点边值问题的解。
3 轨道优化问题求解
由上述分析可知,若已知状态变量、协态变量的初始值,就可以通过数值积分得到问题的解。因而,获取最短时间过渡轨道问题的关键在于获取协态变量初值,加上代表过渡段终端时刻约束的再入点速度v、再入角γ,从而构成待优化参数集:
x(t0)=[λvr(t0),λvt(t0),λr(t0),p(t0),
v(t0),γ(t0)]T
本文采用“人工鱼群算法+序列二次规划”的组合优化算法来求解待优化参数初值。
人工鱼群算法(AFSA)是一类基于动物行为的群体智能优化算法,它通过模拟鱼类的觅食、聚群、追尾、随机等行为在搜索域中进行寻优[5]。算法具有较好的全局寻优能力,对初值参数选择不敏感,鲁棒性强。而在处理轨道优化问题上,序列二次规划算法(SQP)具有初值鲁棒性强、局部搜索能力强等优点[6]。因此将鱼群算法和序列二次规划算法相结合,使各算法之间的优势互补,找到了较好的解决问题的方法。算法流程如图1所示。

图1 组合优化算法流程图Fig.1 Flow chart of the combinatorial optimization algorithm
算法步骤如下:
(1)初始化设定人工鱼群的群体规模N、最大迭代次数M、人工鱼移动最大步长d、感知距离S、迭代次数n和拥挤因子δ等参数。
(2)将取值范围给定的优化参数按浮点数编码原则排列在一起成为一个个体,随机产生N个这样的个体作为初始鱼群。
(3)由过渡段终端约束式(5)可定义人工鱼群食物浓度函数为:
Y(k)=J(x(k))=pk+K1(vrfk-vksinγk)2+
K2(vtfk-vkcosγk)2+K3(rfk-rf)2
(9)
式中,K1~K3为惩罚系数,取值范围为107~108。
(4)行为选择:各人工鱼分别模拟追尾行为和聚群行为,选择行动后食物浓度Y值较大的行为实际执行,缺省行为方式为觅食行为。
(5)判断是否达到终止条件,若不满足,转到步骤(4)重新进行下一步鱼群优化过程。经过若干次迭代后输出人工鱼群算法寻优值。
(6)利用序列二次规划法在该全局优化值附近进行局部寻优,产生高精度全局最优值。
(7)算法结束,输出最优解。
4 仿真结果及分析
仿真初始参数为:轨道高度h=350 km;初始质量m=100 kg;vr=0 m/s;vt=7697 m/s;F=1000 N;ve=4500 m/s。初始时刻天基拦截器位于350 km的圆轨道上,在接收到作战任务后,进行速度和姿态调整进入过渡段轨道飞行,通过连续固定推力转移到高度为100 km的再入点处,而穿过稠密大气层的再入轨迹受过载、热流、动压、滑翔段约束的严格限制,通过再入段分析计算确定再入点速度范围6.5~7.0 km/s,再入角γ∈[-5°,-1°],待优化协态变量取值范围[-100,100],p∈[0,20]。人工鱼群算法初始参数为:N=100,M=300,d=0.3,S=2.5,δ=0.618;觅食尝试最大次数ts=100。
利用“人工鱼群算法+序列二次规划”进行组合寻优,获取过渡时间最短条件下待优化变量初值。以前两个待优化变量为例,进行300次鱼群算法迭代寻优,寻优结果如图2所示,算法可有效获取待优化变量全局最优初值。
图3为迭代过程中鱼群食物浓度变化曲线,其值最终趋于稳定,体现了算法的收敛性。
表1列出了待优化参数协态变量、过渡时间t、再入角γ、再入点高度h和再入点速度v的优化结果。人工鱼群算法由于视野、步长的随机性和随机行为存在,导致其最优解的精度往往难以很高,借助于“序列二次规划”方法的强局部寻优特性,可有效提高寻优精度,经过若干代迭代获取全局最优解。

图2 鱼群算法寻优结果Fig.2 Optimization results of AFSA
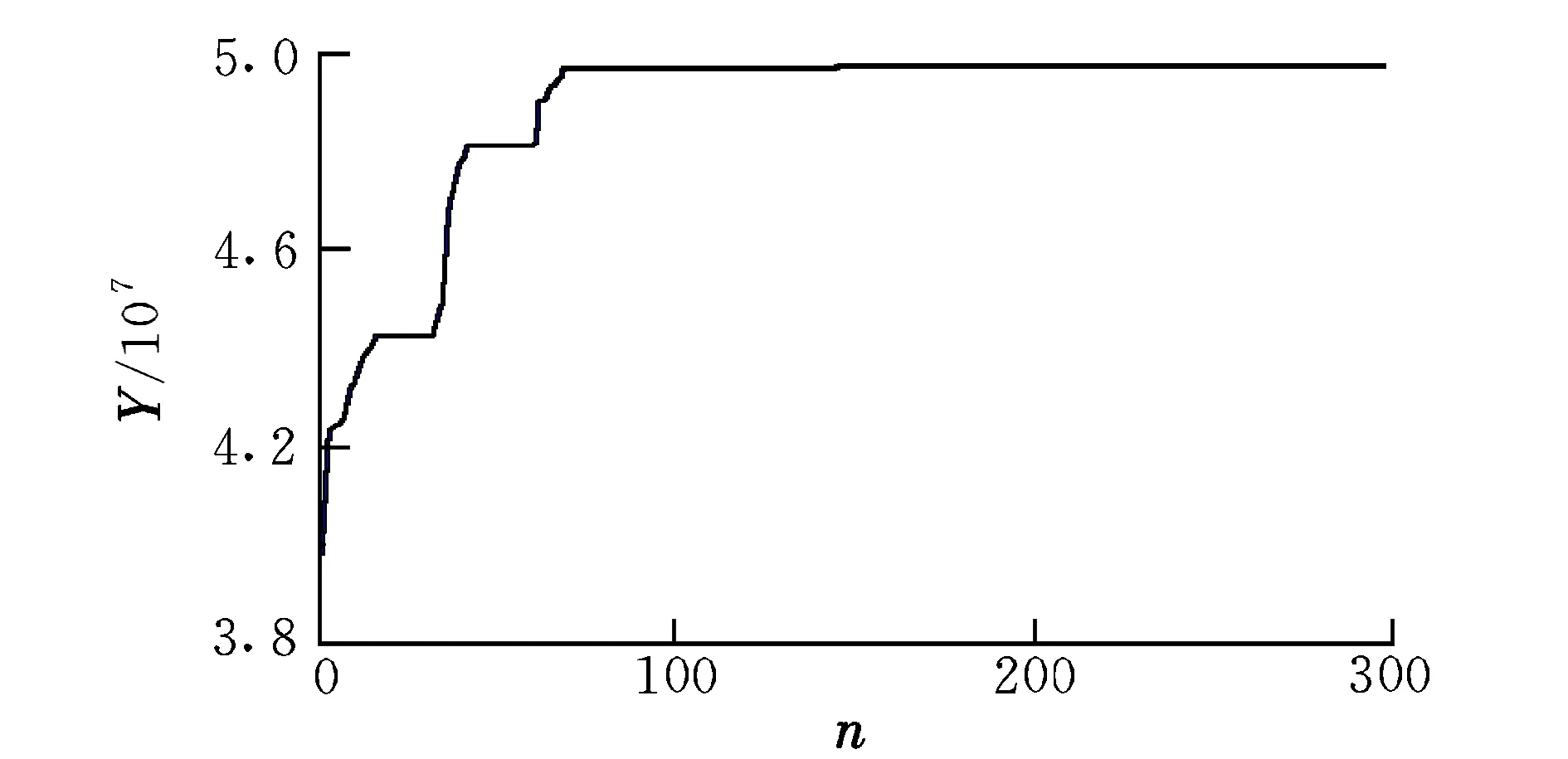
图3 食物浓度变化Fig.3 Variation of the food concentration

待优化参数 AFSA AFSA+SQPλvr-2.5993 1.1476 λvt-8.2878 0.2716 λr-5.1120 6.1852 t/s261.4870 256.7780 γ/(°)-1.6129 -1.9991 h/km100.5892 99.9999 v/m·s-16656.5783 6803.1048
根据以上初始参数进行弹道仿真,仿真曲线如图4~图6所示。
由图可知,拦截器在连续推力发动机作用下再入大气层,再入点速度、高度以及再入角均满足再入段轨迹约束。
传统的优化算法求解两点边值问题要求精确的初值估计[7],而使用人工鱼群算法仅需估计初值的变化范围,从而有效解决初值估计问题,获取全局最优初值。遗传算法(GA)是具有全局优化能力的代表算法之一,在此以求解过渡轨道优化问题为例,将人工鱼群算法与之进行对比。
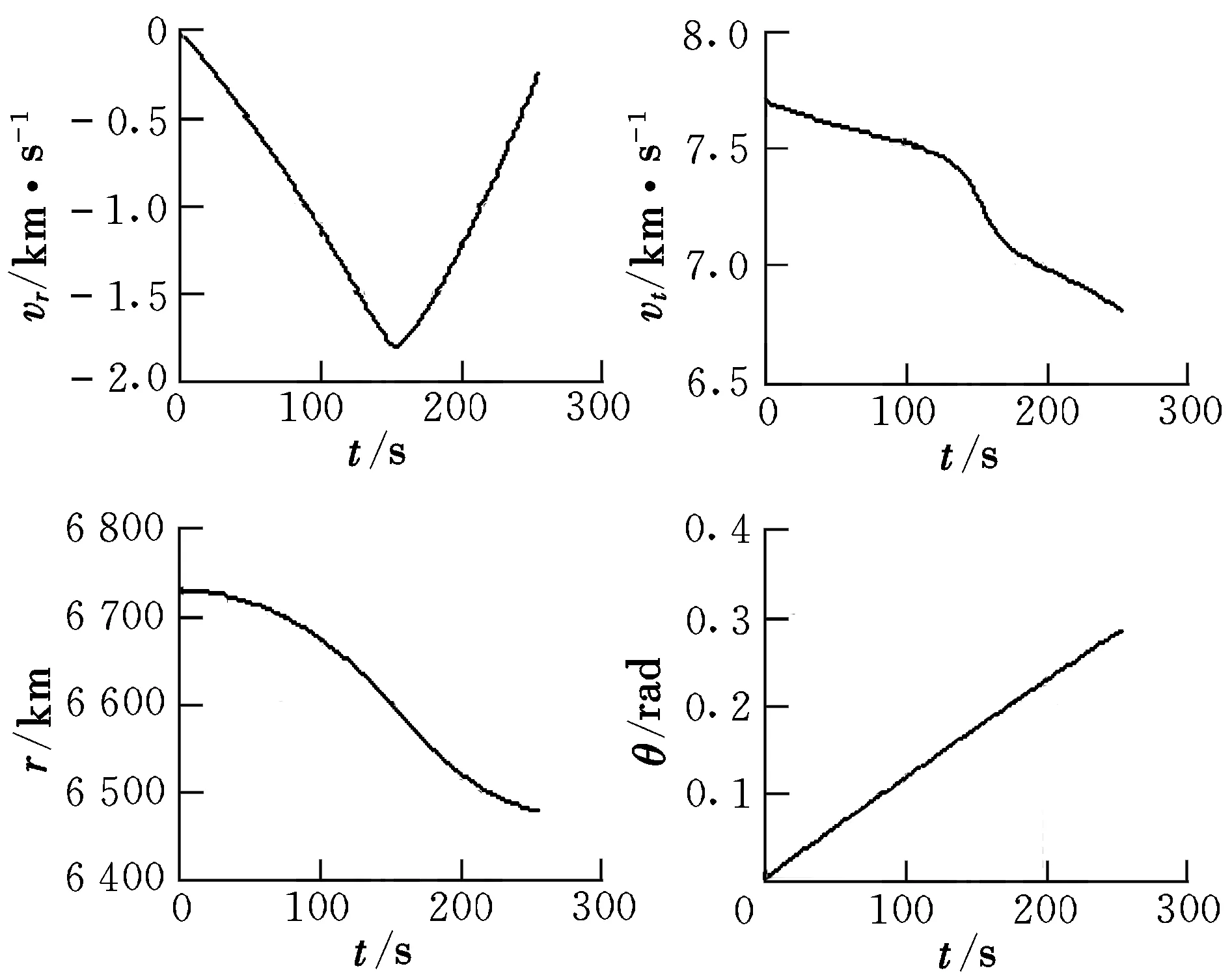
图4 状态变量轨迹Fig.4 Trajectories of state variable
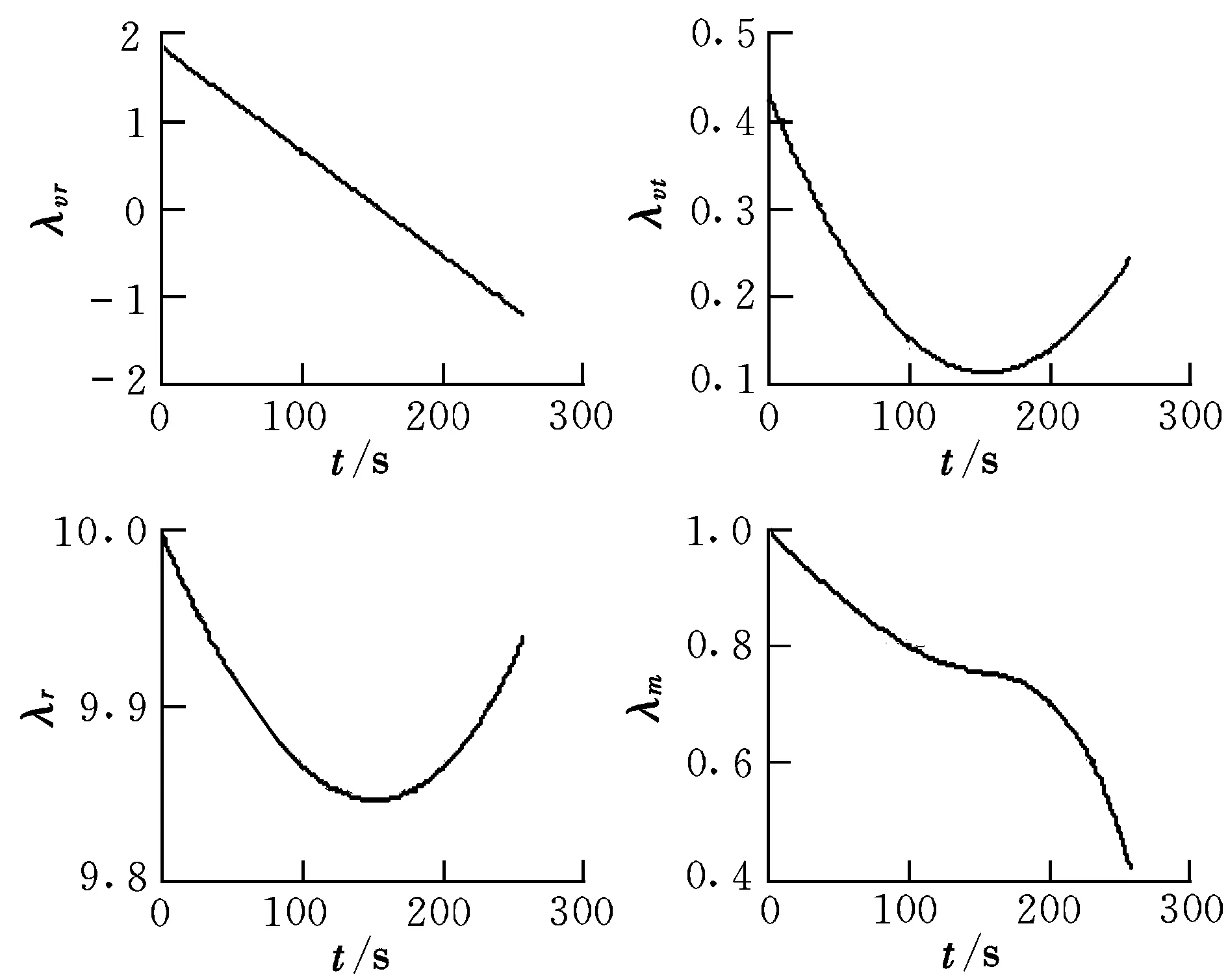
图5 协态变量轨迹Fig.5 Trajectories of co-state variable
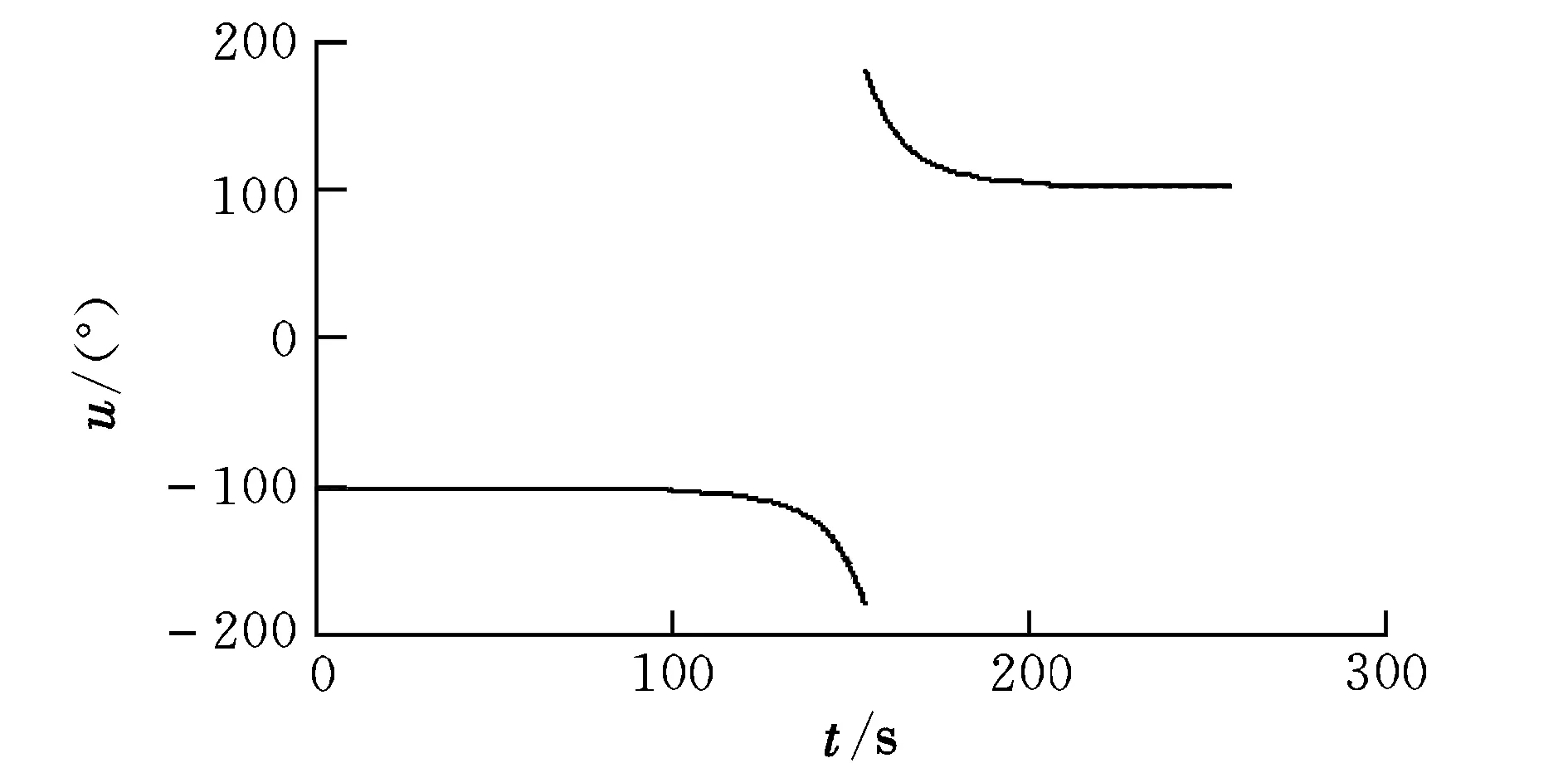
图6 控制变量轨迹Fig.6 Trajectory of control variable
取遗传算法求解参数为:种群规模K=100;最大进化代数T=300;交叉概率Pc=0.8;变异概率Pm=0.05。由于这两种算法都存在一定的随机性,因此,在对照中分别进行了10组实验,最后将结果求平均。寻优结果对比如表2所示,相同算法初始条件下,“人工鱼群算法+序列二次规划”的组合优化算法可有效克服遗传算法的局部收敛问题,鲁棒性更强,寻优精度更高。

表2 不同算法寻优结果对比Table 2 Comparison of different optimization algorithms
图7为遗传算法进化过程图(P为最佳适应度值),与图3所示人工鱼群算法迭代过程相比较,人工鱼群算法的收敛速度更快,遗传算法虽然可以很快收敛到最优解的附近,但进化后期收敛速度变慢,要达到真正的最优解则需经历更多迭代时间,甚至无法收敛到全局最优。
由仿真结果可以看出,人工鱼群算法具有对初值及参数选择不敏感、鲁棒性强、收敛速度快、全局寻优等特点,利用序列二次规划方法较强局部寻优特性,采用组合的优化算法可以规划出满足再入段约束的过渡段时间最短转移轨道。
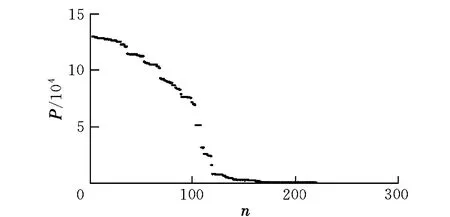
图7 遗传算法进化过程Fig.7 Evolution of genetic algorithm
5 结束语
本文利用“人工鱼群算法+序列二次规划”的组合优化算法,对天基拦截器过渡轨道进行了优化设计。该组合算法有效克服了传统优化算法中的某些缺陷,如求解两点边值问题的初值猜测、遗传算法的局部收敛问题,可为同类轨道优化问题的求解提供参考。定性分析及仿真表明,该组合算法在保证算法收敛到全局最优的同时满足了速度及精度要求。
由于视野、步长的随机性和随机行为存在,人工鱼群算法优化效率有待进一步提高。在今后的工作中,将注重研究更为合理的参数选取方法,以进一步提高鱼群算法的优化效率。
参考文献:
[1] 谭丽芬,闫野,周英,等.美俄天基动能武器研究进展[J].飞航导弹,2010,(3):49-53.
[2] Betts J T.Survey of numerical methods for trajectory optimization[J].Journal of Guidance,Control,and Dynamics,1998,21(2):193-206.
[3] 吴德隆,王小军.航天器气动力辅助变轨动力学与最优控制[M].北京:中国宇航出版社,2006:34-43.
[4] 刘暾,赵钧.空间飞行器动力学[M].哈尔滨:哈尔滨工业大学出版社,2003:131-139.
[5] 李晓磊.一种新型的智能优化方法——人工鱼群算法[D].杭州:浙江大学,2003.
[6] 孙军伟,乔栋,崔平远.基于SQP方法的常推力月球软着陆轨道优化方法[J].宇航学报,2006,27(1):99-102.
[7] 雍恩米,陈磊,唐国金.飞行器轨迹优化数值方法综述[J].宇航学报,2008,29(2):397-406.
