空间站柔性电池翼在轨载荷计算及分析
2014-09-17刘芳郭其威吴松肖余之
刘芳 郭其威 吴松 肖余之
(1.上海宇航系统工程研究所,上海 2 01109)(2.上海市空间飞行器机构重点实验室,上海 2 01109)
空间站柔性电池翼在轨载荷计算及分析
刘芳1,2†郭其威1吴松1肖余之1
(1.上海宇航系统工程研究所,上海 2 01109)(2.上海市空间飞行器机构重点实验室,上海 2 01109)
为了保证空间站正常运行所需要的大量能源及发射入轨时的较小重量代价,我国空间站采用大面积柔性电池翼的设计方案.大柔性电池翼因其结构复杂且频率极低,在轨运行时又要承受多次大机动过程产生的载荷,各承力组件的强度校核和参数设计成为影响整个空间站任务成败的重要环节.本文从工程应用角度出发建立了空间站柔性电池翼的线性简化模型,计算并分析了柔性电池翼在轨大机动过程中各关键组件的载荷,计算结果可对大柔性电池翼的强度校核和减重设计起到一定指导作用.
空间站, 柔性电池翼, 伸展机构, 载荷计算, 模态综合法
引言
1992年中国开始实施“921工程”即中国载人航天工程,确定了“三步走”的发展战略,第三步便是要在太空中建立一个有人照料的空间实验室,也就是中国空间站.为了保证空间站的充足能量供应,必须采用大面积的太阳电池翼,同时还要考虑发射时的重量代价,我国空间站借鉴国际空间站太阳电池翼的成功经验,采用大面积柔性电池翼在轨展开的方案进行设计.
太阳电池翼作为空间站的核心组件,其在轨动力问题尤其突出[1-10].而为进行柔性电池翼的动力学分析与研究,其分析模型的建立又尤为关键,文献[1-2]对国际空间站柔性电池翼和伸展机构的动力学问题进行了研究和综述,曲广吉[3-4]等针对各类航天器尤其是空间站柔性电池翼中存在的动力学问题进行了阐述和总结,指出了研究中存在的困难.邱瑞强[5]和陶建忠[6]等针对一种大面积柔性电池阵[7]分别进行了解析法和有限元方法建模,对其固有频率和模态参数进行了求解.以上成果都为我国空间站大柔性电池翼的方案设计起到了指导作用,然而,我国空间站柔性太阳电池翼的设计还需要考虑更为复杂的在轨大机动工况下的承载能力,这就需要对其各在轨工况下的载荷进行计算以作为强度设计和校核的依据.
本文从工程应用角度出发,通过对模型的合理简化,建立一种柔性电池翼的线性计算模型,并对其在轨大机动过程产生的载荷进行计算,从而为大面积柔性电池翼关键部件和组件的设计和强度校核提供依据.
1 柔性电池翼组成及工作原理
我国空间站柔性电池翼主要抬升机构、伸展机构、张紧机构、导向机构、收藏箱、收藏筒、电池阵、电缆系统等组成,其在轨完全展开后状态如图1所示.

图1 空间站柔性电池翼在轨全展开状态Fig.1 Full deployment case of flexible solar array
伸展机构、抬升机构与收藏筒为主要承载构件,收藏筒与伸展机构的结构如图2所示.其中,收藏筒对电池翼收拢状态的伸展机构起到收纳作用,同时对展开状态的伸展机构起到支撑作用;伸展机构通过铰链杆组件和伸缩拉杆组件展开锁定后的刚度对上收藏箱体和收藏筒结构起到支撑作用,且伸缩拉杆组件在展开后自动施加的预紧力保证了伸展机构的扭转和拉伸刚度;柔性电池翼阵面通过张紧机构和导向机构施加的张紧力保持展平状态并固定于上、下收藏箱体上,上收藏箱体则通过展开锁定机构与收藏筒连接.上、下收藏箱体、张紧机构、导向机构和电缆系统组成的柔性电池翼阵面如图3所示.
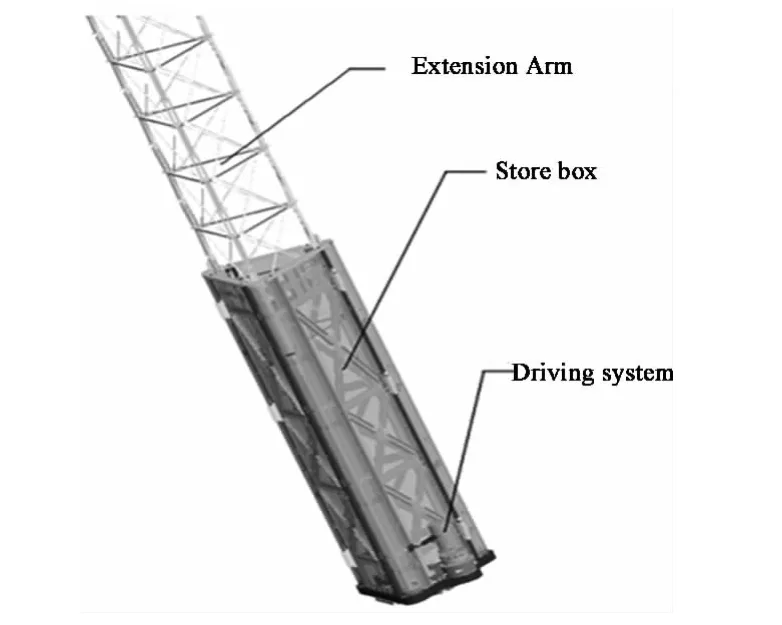
图2 收藏筒与伸展机构Fig.2 Store box and Extension Arm
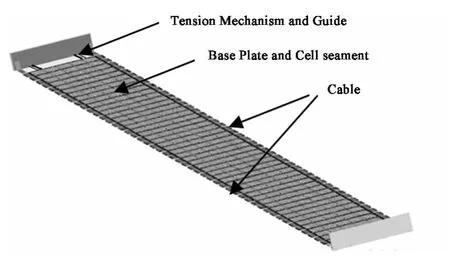
图3 电池阵阵面组成Fig.3 Solar Array and its constitution
由于大量机构设计的存在,柔性电池翼在展开锁定之后元器件和组件之间存在大量的间隙,从而导致结构刚度的不连续性和非线性,这给结构动态特性的分析带来了大量的困难.然而,为了保证结构机构的展开刚度,伸展机构通过结构设计实现了展开后自动施加预应力的手段,同时整个柔性电池翼通过张紧机构和导向机构的预应力设计来保证阵面的展平状态和各结构机构的相互预紧.文献[9]研究指出,预应力的存在可能引起结构元件的失稳或使元件的刚度下降,但是也会消除构件之间的间隙,减弱连接间隙的非线性,且当预应力为张力时可以减小系统的局部动力响应,因此,柔性电池翼通过合理的设计可以保证结构承载刚度的同时减少结构的非线性,这就给我们对结构的简化和线性处理带来了可能.
2 柔性电池翼动力学分析模型
基于以上对柔性电池翼设计和工作原理的分析,采用NASTRAN软件建立工程上可应用的柔性电池翼有限元模型如图4所示.有限元模型主要采用梁单元和壳单元,同时辅以弹簧单元和刚性约束等来对结构组件之间的连接进行模拟和等效.
图4 柔性电池翼有限元模型Fig.4 FEM model of flexible solar array
其中,作为柔性电池翼结构主要的承力构件,伸展机构和抬升机构在实际工作过程中主要表现为整体低频模态的振动,因此为避免伸展机构和抬升机构局部模态和高频模态对计算和分析结果的影响,伸展机构和抬升机构通过事先建立三维实体模型,根据静力刚度等效的原则将其分别等效为粱模型,并通过对粱单元参数的设计来保证基本动力学特性的相等.考虑到电池片在柔性基板上通过胶离散粘贴,且胶的弹性模量较基板相差较多,实际模型中仅考虑电池片的质量效应,将电池片作为附加质量加到基板上.
结构中非线性效应比较显著的组件为张紧机构和导向机构,其一因为张紧机构和导向机构本身采用柔性弹簧设计,在初始张紧力和电池阵面振动惯性力的作用下,其伸长量可以达到几十厘米,属于大变形引起的非线性;其二为初始张紧力的施加而产生的边界非线性;其三为张紧机构和导向机构连接绳索的单向张拉特性而导致的刚度非线性.大变形引起的非线性和边界非线性可以通过非线性求解算法来解决,而机构的刚度非线性则可以通过对张紧力的优化设计来保证,即保证结构张紧刚度
的同时也保证张紧绳索不会松弛或很小的松弛.张紧机构原理如图5(a)所示,图5(b)为等效的非线性模型,为一线性弹簧加间隙单元构成的非线性弹簧,而图5(c)为进一步等效的线性弹簧,即认为张紧机构在轨运行期间一直处于张拉状态.
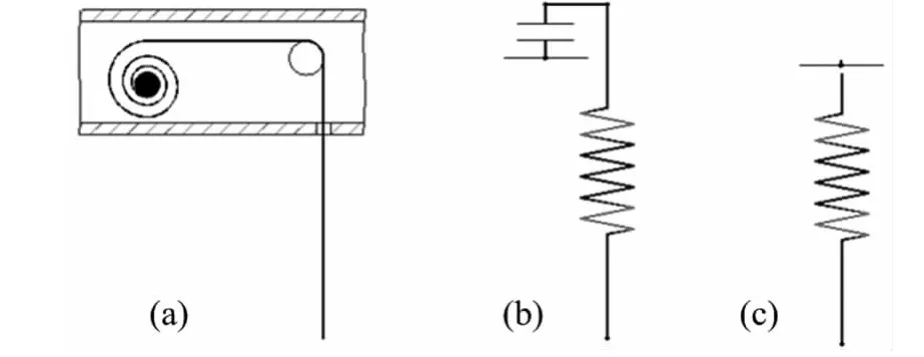
图5 张紧机构原理及等效ig.5 Principles of tension mechanism and equivalence model
另外,伸展机构、张紧机构和导向机构中的预紧力可以通过温度等效的方式对相关单元施加温度来实现,即通过相关单元的热变形来对结构其它部分产生拉力.限于篇幅,关于柔性电池翼动力学建模的内容将另文详细介绍,这里仅给出两种展开状态下柔性电池翼的主要几阶模态频率及振型描述如表1.

表1 柔性电池翼主要模态Table 1 Primary modes of flexible solar array
3 柔性电池翼在轨载荷计算及结果分析
柔性电池翼在轨载荷的计算实际上是结构瞬态响应的分析过程,分析的输入条件为柔性电池翼在轨可能经历的各种工况,一般以电池翼与驱动机构安装界面处的加速度形式给出.然而,在空间站15年设计寿命周期内柔性电池翼要经历的载荷工况就有几十种之多,要对所有工况进行计算将是非常大的工作量,且某些工况下的载荷很明显会被其它工况覆盖,因此在进行计算之前,需要对计算工况进行梳理和分类.
经分类整理,共有两种类型的激励:一种为不同时期、不同构型的发射入轨、轨道机动及轨道维持类的持续恒定加速度激励,另一种为对接、分离及离轨等瞬态冲击激励,第一种激励工况统称为变轨工况,第二种激励工况统称为对接工况.在进行计算工况筛选时,可不考虑电池翼的柔性,对这两种类型的激励分别根据平动主方向激励产生的载荷和转动主方向激励产生的载荷进行叠加来估计载荷的大小,并对计算工况进行筛选.另外计算时还需要考虑激励作用的方向不同,即激励作用方向与电池翼阵面的角度不同;还有柔性电池翼不同的展开状态、不同组合体构型、二维驱动机构转动的组合等,这样组合下来的计算工况也有十多种.图6-图9给出了柔性电池翼抬升机构组件载荷最大值工况的响应曲线,图10给出了张紧机构绳索张力最大工况的变化曲线,表2给出了关键组件载荷最大值的计算结果.
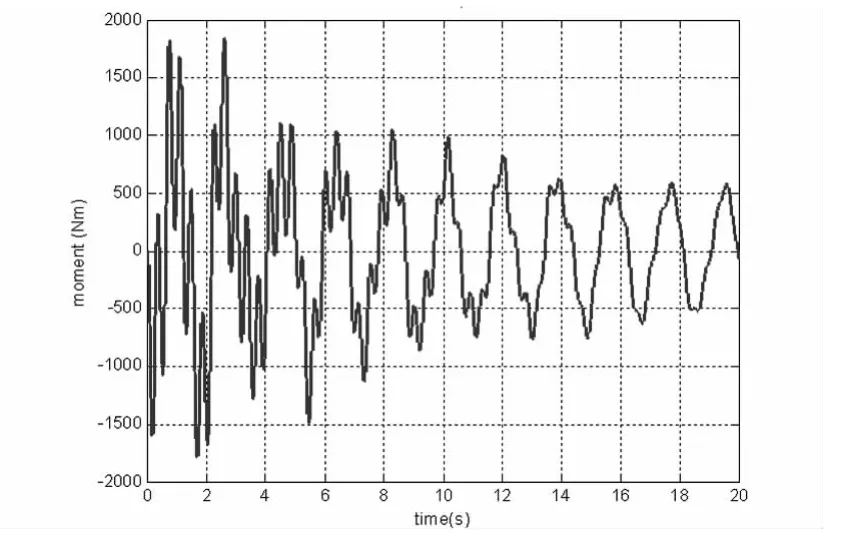
图6 抬升机构组件面内弯矩(一次展开对接工况)Fig.6 In plane bending moment of lifting mechanism(first deployment and docking case)

图7 抬升机构组件面外弯矩(全展开变轨工况)Fig.7 Out of plane bending moment of lifting mechanism(full deployment and maneuver case)
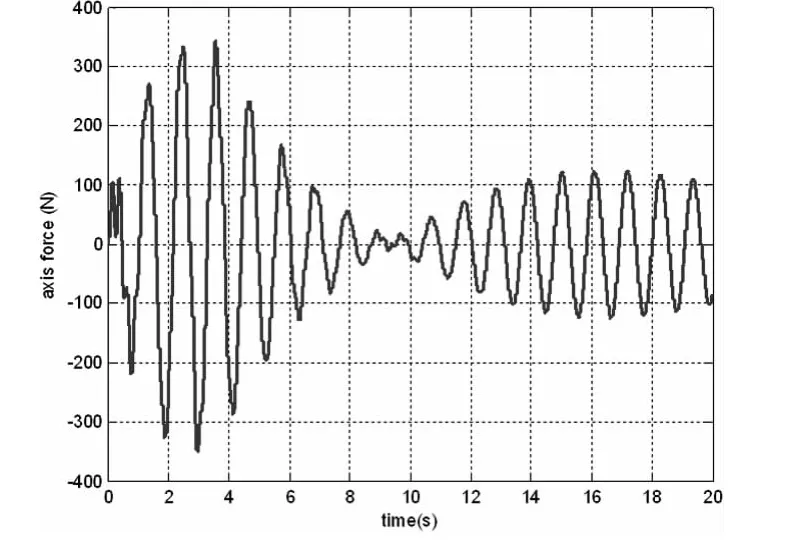
图8 抬升机构组件轴力(一次展开对接工况)Fig.8 Axial force of lifting mechanism(first deployment and docking case)

9 抬升机构组件轴力(一次展开对接工况)Fig.9 Torque of lifting mechanism(first deployment and docking case)
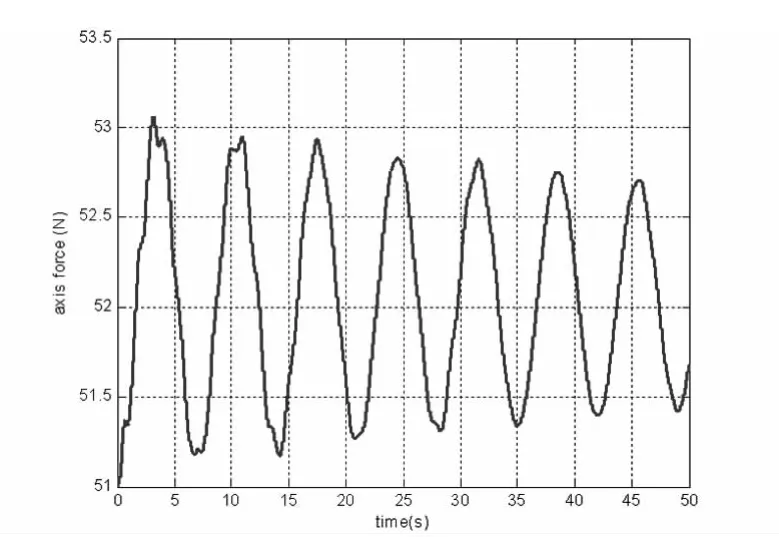
图10 张紧机构绳索张力(全展开对接工况)Fig.10 Tensional force of tension mechanism’s rope(full deployment and docking case)
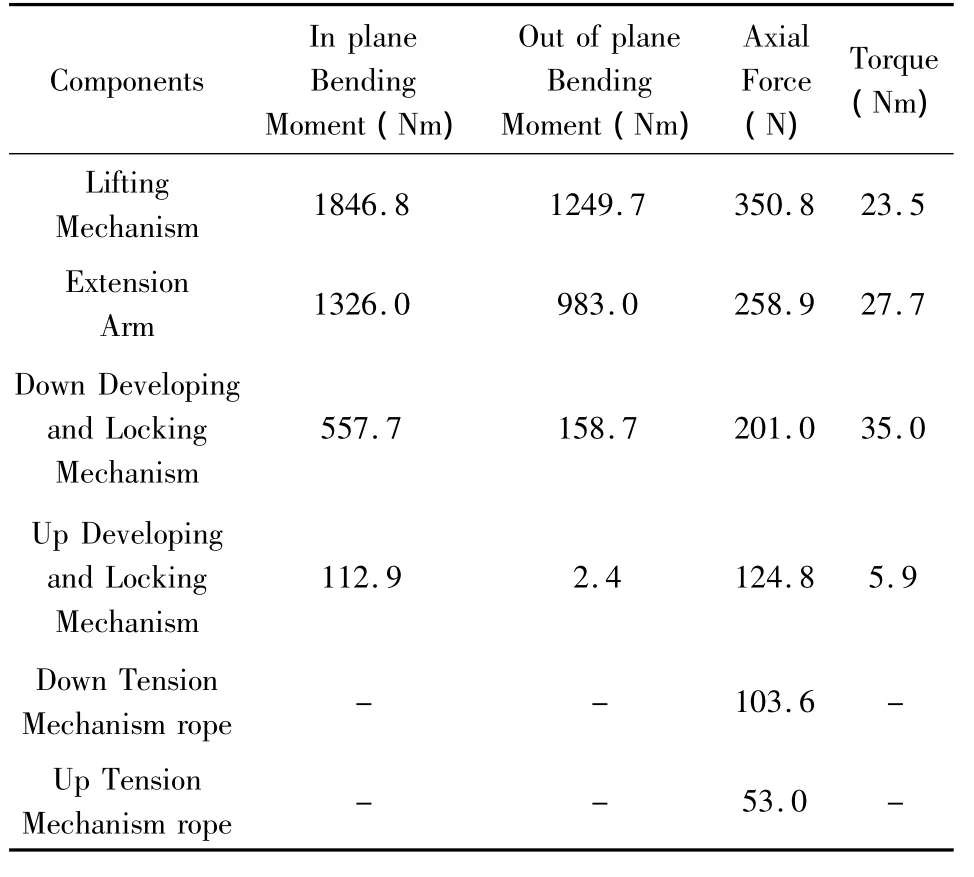
表2 柔性电池翼主要部件载荷Table 2 Loads of main components for flexible solar array
其中,抬升机构和伸展机构面内弯矩和扭矩最大值、抬升机构的轴力最大值均出现在柔性电池翼一次展开状态的对接工况,而抬升机构和伸展机构的面外弯矩最大值均出现在柔性电池翼完全展开状态的变轨工况;上、下箱体展开锁定机构的内、面外弯矩和轴力最大值均出现在柔性电池翼一次展开状态的对接工况,张紧机构绳索张力最大值出现在柔性电池翼全展开状态的对接工况.
对以上结果进行分析可以得到以下结论:从载荷曲线可以看出,由于柔性电池翼的模态频率很低且阻尼较大,因此不论是对接工况的冲击激励还是变轨工况的稳态激励,实际参与结构响应的模态并不是很多,这给柔性电池翼结构参数的修改和结构设计带来了方便,同时也对柔性电池翼在轨振动控制及整个空间站的姿态控制指明了方向.上端张紧机构绳索由于张拉刚度较低,结构变形产生的张拉力与初始预紧张拉力51N相比很小,说明通过结构设计完全可以实现张紧机构绳索在轨运行一直处于张拉状态,也验证了前文中可以将此非线性结构线性化处理的合理性和正确性.
4 结论
通过对我国空间站柔性电池翼组成及工作原理的分析,通过合理简化和假设提出了适合工程应用的一种线性化模型,并利用NASTRAN软件对柔性电池翼多种在轨工况载荷进行了计算和分析,通过对计算结果的整理和分析给出了柔性电池翼在轨机动工况下各关键部组件载荷最大值.
对计算结果的进一步分析表明,文中提出的假设和对模型的简化是合理可行的,并且也对空间站柔性电池翼的结构设计和参数修改指明了方向,同时,载荷计算结果可以作为柔性电池翼结构设计和强度校核的依据.
1 Wu S C,Ghofranian S.Anomaly simulation and resolution of international space station solar array deployment.In:Proceedings of SPIE,Modeling,Simulation,and Verification of Space-based Systems II,Orlando,2005:38 ~47
2 Jones P A,Spence B R.Spacecraft solar array technology trends.IEEE Aerospace and Electronic Systems Magazine,2011,26(8):17~28
3 曲广吉.航天器动力学技术的发展和挑战.强度与环境,2003,30(4):1~6(Qu G J.Development and challenge of spacecraft and dynamics technology.Structure&Environment Engineering,2003,30(4):1 ~ 6(in Chinese))
4曲广吉,邵成勋.空间站动力学建模研究.空间站工程概论,哈尔滨:哈尔滨工业大学出版社,1990:108~144(Qu G J,Shao C X.Study on dynamics modeling of space station.A Ssurvey of Space Station Engineering,Harbin:Publication of HIT,1990:108~144(in Chinese))
5 邱瑞强.空间站大面积太阳电池阵的动力学问题.上海航天,1999,2:1~6(Qiu R Q.Dynamics of a large flexible solar array of space station.Aerospace Shanghai,1999,2:1~6(in Chinese))
6 陶建忠,雷勇军.大柔性太阳电池翼模态参数计算.湖南理工学院学报(自然科学版),2003,16(4):33~36(Tao J Z,Lei Y J.Model characteristics analysis of large flexible solar panel.Journal of Hunan Institute of Science and Technology(Natural Sciences),2003,16(4):33 ~36(in Chinese))
7 李瑞祥,王治易,肖杰等.空间实验室大面积太阳电池阵技术研究.上海航天,2003,4:10~14(Li R X,Wang Z Y,Xiao J,et al.Study on technology of large area solar array in space lab.Aerospace Shanghai,2003,4:10 ~ 1 4(in Chinese))
8 刘志权,杨淑利,濮海玲.空间太阳电池阵的发展现状及趋势.航天器工程,2012,21(6):112~118(Liu Z Q,Yang S L,Pu H L.Development and trend of space solar array technology.Spacecraft Engineering,2012,21(6):112~118(in Chinese))
9 王巍,于登云,马兴瑞.航天器铰接结构非线性动力学特性研究进展.力学进展,2006,36(2):233~238(Wang W,Yu D Y,Ma X R.Advances and trends of nonlinear dynamics of space joint-dominated structure.Advances in Mechanics,2006,36(2):233 ~ 238(in Chinese))
10 吴德隆,王毅,文荣.空间站大型伸展机构动力学研究中的若干问题.中国空间科学技术,1996,6:29~37(Wu D L,Wang Y,Wen R.Some problems on the dynamics of large deployable mechanisms for space station.Chinese Space Science and Technology,1996,6:29~37
† Corresponding author E-mail:liufanghit@163.com
ON-ORBIT LOAD COMPUTATION AND ANALYSIS OF FLEXIBLE SOLAR ARRAY FOR CHINA SPACE STATION
Liu Fang†Guo Qiwei Wu Song Xiao Yuzhi
(Aerospace System Engineering Shanghai,201109Shanghai,China)
In order to ensure the huge energy for normal working of China Space Station and less weight costs in launching,China Space Station adopted the large area flexible solar array(LAFSA)design scheme.The LAFSA has complex structures and extremely low frequency,and bearing loads produced by multiple large maneuver procedure in orbit running,so the strength check and parameter design for each load-carrying component become very important segments for the mission's success or failure of China Space Station.This paper established a simplified linear modal for the flexible solar array of China Space Station from the perspective of engineering applications,and computed the loads of every important component of the flexible solar array in on-orbit large maneuver procedures,which can be used as the instruction for strength check and lightweight design of the LAFSA.
china space station, flexible solar array, deployable mechanism, load computation, modal synthesis method
6 June 2014,
8 July 2014.
10.6052/1672-6553-2014-052
2014-06-06 收到第 1 稿,2014-07-08 收到修改稿.
E-mail:liufanghit@163.com
