无人机单副翼大角度卡死配平策略研究
2014-09-15吴成富戢凤段晓军邵朋院
吴成富, 戢凤, 段晓军, 邵朋院
(西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710065)
0 引言
无人机控制系统的执行机构舵机根据无人机的控制信号来控制飞机的飞行和稳定。 如果舵机出现故障,则可能导致飞机失控。舵机卡死是舵机故障中最为严重的故障,也是某容损项目的主要研究内容之一。当某舵面出现舵机卡死故障时,可以利用其他舵面的控制冗余,通过指令重新分配,尽量消除影响,从而实现解析冗余容错控制[1]。
在高度、速度等条件不变的情况下,单侧副翼卡死为飞机附加常值的滚转和俯仰力矩扰动。当副翼卡死位置较小时,由于卡死产生的滚转操纵力矩较小,飞机机体产生的力矩可以平衡该力矩,在这种情况下,飞机横侧向运动不会发散,而是进入荷兰滚模态[2]。文献[3]对F16单侧副翼卡死的容错控制进行了研究,利用升降舵和方向舵来进行平衡控制。当副翼卡死在较大位置时,由于飞机机体产生的气动力矩不足以平衡卡死舵面的滚转力矩,在这种情况下,飞机横侧向运动会发散,进入不稳定的螺旋模态,飞机持续滚转[4]。在以上两种情况下,飞机的滚转角都会产生较大变化。在大滚转角下,飞机的升力在竖直方向的分量不足以平衡重力,所以会造成飞机持续掉高,若其他输入保持在配平状态,则飞机会摔机。
本文研究的实验平台为V尾常规布局小型无人机。针对该实验平台单侧副翼卡死在较大角度位置(右侧副翼卡死在20°)的情况,对其配平方法进行研究,并通过仿真验证得出该飞机针对单侧副翼大角度卡死的配平策略。本文的研究结果在无人机容错、容损等课题研究及以后的工程应用中具有重要意义。
1 单侧副翼卡死的配平方法分析
在单侧副翼卡死的情况下,对飞机的横侧向和纵向都有影响,其中由于副翼对滚转力矩的影响较大,同时,副翼卡死后,飞机的滚转操纵能力大幅降低,所以副翼卡死时飞机配平的难点是如何配平滚转力矩。
设副翼的出舵量为δa,若将左右副翼的舵效单独考虑,则整机的滚转力矩系数为[5]:
Cl=Clββ+Clδarδar+Clδalδal
(1)
当上式满足Cl=0时,整机的滚转力矩达到平衡。
从式(1)可知,当右副翼卡死时,可以使用侧滑角β和左副翼同时进行配平,所以存在一个配平量分配的问题。在配平过程中,这两个量应该如何分配,是一个值得研究的问题。下面分析侧滑角β和左副翼δal对飞机运动产生的影响。
整机侧力系数为:
CY=CYββ+CYδrδr+CYδpδp+CYγγ
(2)
式中,CYδr,CYδp及CYγ都较小。由式(1)和式(2)可知,侧滑角除影响滚转力矩系数外,主要影响侧力Y。
要平衡侧滑角带来的侧力Y,需要飞机有较大的滚转角,以用升力的分量来平衡该侧力,同时,增大侧滑角会增加整机的阻力,为了维持空速,需要消耗更多的动力。但加入侧滑角可以减小左副翼的出舵量,从而使飞机具有较大的剩余操纵能力。
由于该飞机的副翼同时作为升降舵使用,所以较大的左副翼除影响滚转力矩外,还产生俯仰力矩的扰动,为了平衡该力矩,需要增加升降舵的出舵量,所以增加左副翼的出舵量,虽然会减小飞机的侧滑角和滚转角,但会降低飞机的剩余操纵能力。
图1给出了本文实验平台下,右副翼卡死在20°配平时随着侧滑角的增加,左副翼和滚转角的变化曲线。由图1可以看出,图1的结果与前面的分析结果一致,证明了前面分析的正确性。
2 控制器设计
根据无人机单侧副翼大角度卡死后的飞机响应情况进行分析,可得到不同的配平方法。本论文研究的配平方法主要有两种:用另一片副翼配平及主要用侧滑角配平。对上述两种方法的极限值即另一片副翼20°配平或侧滑角-9°配平进行设计,则各配平设计点配平参数如表1所示。
针对该配平设计点,本文控制器采用传统PID方法,对其进行仿真验证。控制器结构内环与常规控制器相同,采用三轴姿态控制和空速保持。外环控制器纵向采用高度保持控制器,而横侧向采用侧滑角保持控制器。侧滑角导数为:

(3)
由上式可知,偏航角速率(p)、滚转角速率(r)以及侧向力(Y)都对侧滑角有贡献,而前两个角速率需要使用副翼和方向舵来产生,而侧滑角建立之后,会产生侧力,需产生滚转角,通过升力分量来平衡该侧滑角。所以,侧滑角采用副翼和方向舵协调控制的方法,使用滚转角和偏航角控制作为侧滑角保持控制器的内回路。侧滑角保持控制器结构如图2所示。
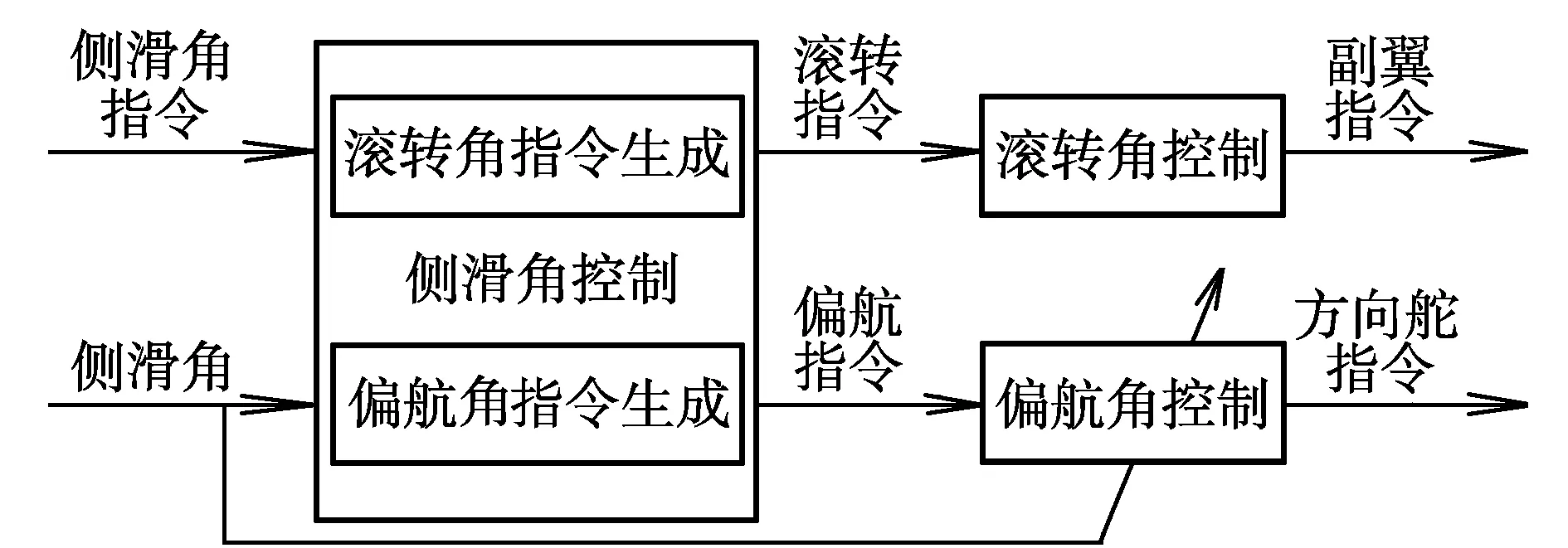
图2 侧滑角保持控制器结构框图Fig.2 Block diagram of sideslip angle controller
侧滑角保持控制器由内环姿态控制和外环的姿态指令生成(即上图中的侧滑角控制)组成,其中外环由侧滑角偏差来生成滚转和偏航指令,内环分别使用副翼和方向舵来实现姿态角的控制。需要注意的是,其中偏航角控制与常规的偏航角控制不同,其主要目的并不是控制偏航角,而是使用方向舵来配合产生侧滑角,并使侧滑角到达稳态时航向也达到稳态,实现稳态侧滑直飞。上图中各个控制器都采用经典的PID控制律,其中在参数设计过程中,发现偏航角控制的参数随侧滑角变化较大,所以,偏航角采用增益调度PID控制。其他控制器与常规控制器类似,在此不再赘述。
3 仿真结果及分析
根据设计好的控制器,对验证飞机的右副翼卡死在20°时采用配平设计点1的方法(即最大侧滑角配平)进行配平的效果进行仿真验证。初始状态为飞机在500 m高度正常平飞,仿真开始时右副翼卡死在20°,然后过渡到最大侧滑-9°,过渡过程中相关信号的响应如图3所示。
初始状态与配平设计点1相同,在采用配平设计点2的配平方法的情况下,相应的响应如图4所示。

图3 右副翼卡死时系统设计点1的非线性响应曲线Fig.3 Nonlinear response of control system when right aileron jammed on state point 1

图4 右副翼卡死时系统设计点2的非线性响应曲线Fig.4 Nonlinear response of control system when right aileron jammed on state point 2
由图3和图4可以看出,该过渡过程在10 s左右完成且用另一片副翼配平的方法相对慢些,整个过程中高度均波动近10 m,最大滚转角达到-70°;在进入稳态后,两种方法的空速均降低了3 m/s,最后稳定在498 m附近。
4 结束语
从上面理论分析和实际配平的结果可以看出,在配平中增加侧滑角和左副翼各有利弊:增加侧滑角可以使飞机具有较大的剩余操纵能力,但会增加飞机的滚转角;增加左副翼可以减小飞机的侧滑和滚转,但是会减小剩余操纵能力。针对上述分析和飞机不同阶段的不同需求,可以制订出如下的配平策略:(1)在空中飞行阶段,为了保证飞机具有较大的操纵能力,可以加入较大的侧滑角配平;(2)在返航着陆阶段,为了着陆安全,飞机不能有较大的姿态,同时为了对准跑道,飞机不能有较大的侧滑角,所以在着陆阶段可以加入较大的左副翼。
本文的研究结果,有效地解决了舵面卡死的快速稳定及性能恢复问题,相比于现有的只能处理单侧副翼有限卡死的容错控制方案,该方法的容错能力大幅提高。
参考文献:
[1] 陈淑琴,于静,席剑辉,等.方向舵有限卡死下无人机螺旋运动的遏制与改出[J].火力与指挥控制,2011,36(4):53-56.
[2] 王娜,席剑辉,黄宇,等.无人机单副翼有限卡死时荷兰滚运动分析[J].仪器仪表学报,2009,30(6):838-842.
[3] Suba Thomas,Harry G Kwatny,Bor-Chin Chang,et al.Regulator design for control surface failure accommodation in an F-16[R].AIAA-2005-5939,2005.
[4] Jourdan D B,Piedmonte M D,Gavrilets V,et al.Enhancing UAV survivability through damage tolerant control[C]//AIAA Guidance,Navigation,and Control Conference.USA:Reston,2010:2-5.
[5] 张明廉.飞行控制系统[M]. 北京:航空工业出版社,1993:33-40.