老年人三维本体感觉测试系统研制与应用
2014-09-13纪仲秋
李 林 纪仲秋 龚 瑞
(北京师范大学体育与运动学院,北京 100875)
在老年人康复治疗中,临床医生往往将注意力集中在肌力下降、关节活动受限、肢体痉挛等,主要予以关节运动和肌力训练,而同样重要的本体感觉障碍却常被忽略。本体感觉康复训练装置较多,测评装置很少,如BIODEX多关节肌力测试系统可以测试大关节的单轴本体感觉。但该设备价格昂贵,且不易移动,不能方便携带到病房或康复大厅。而且不能对颈椎、腰椎和小关节,如手指关节进行测试,最主要是等速设备进行的是某一关节的单轴本体感觉测试,而在现实生活和运动中,人体一般进行的是三维空间里的三轴复合运动〔1,2〕。本文拟研制老年人三维本体感觉测试系统。
1 测试原理与方法、系统组成
1.1原理与方法 老年人三维本体感觉测试系统采用主动-主动开链角度重建法。角度重建法主要是对关节位置觉的测定,可分为开链和闭链位置重建两种。前者又分为被动-被动、被动-主动、主动-主动开链角度重建。主动-主动开链位置重建法主要是预先令受试者的关节主动定于某一屈曲角度,作为目标角度,停留几秒,让受试者注意感受关节的位置,然后再令受试者通过主动运动并依靠自我判断重建上述角度,最后对角度重建的精确度进行测量。老年人三维本体感觉测试系统包括一个自制的基于惯性传感器的姿态测量系统,该系统可以输出较高精度的姿态角等数据。将受试者测试关节的近端环节固定,惯性传感器通过绑带固定在测试关节的远端环节上。惯性传感器在受试者测试关节的远端环节运动过程中与其做相同的运动,并记录下实时变化的三维角度值,即关节活动角度值。此方法可方便记录角度重建法中三维的目标角度、重建角度等数据。三维姿态输出被定义为惯性传感器自身坐标系S,与地球固定坐标系G之间的定位,使用与地球固定坐标系G作为参考坐标系,遵循笛卡儿右手定则,如图1。
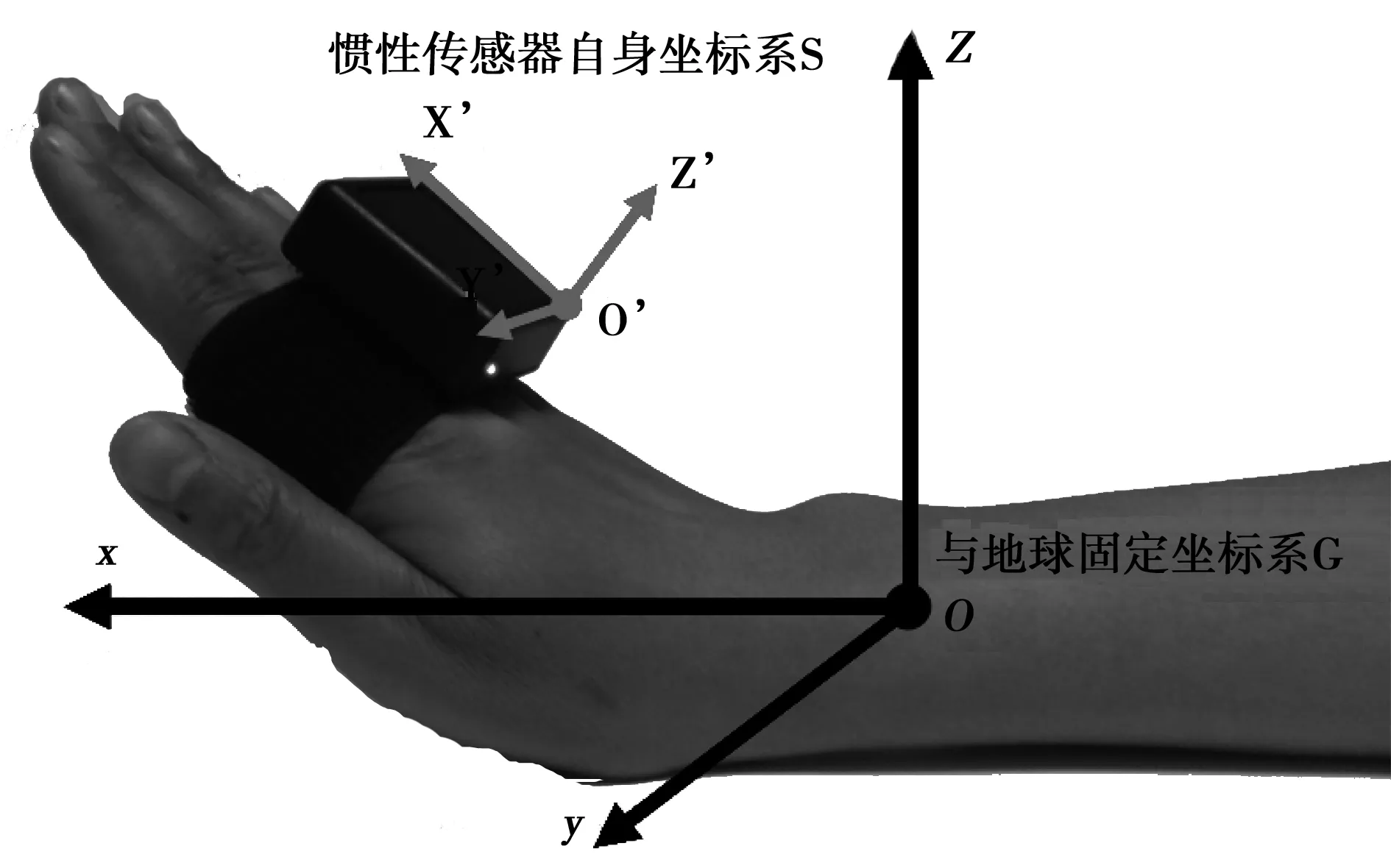
图1 坐标系定义
1.2系统组成
1.2.1系统硬件 内部结构如图2,主要包括惯性传感器部分、 ARM处理器部分及蓝牙无线传输部分。惯性传感器部分包括正交配置的3个微陀螺仪、3个微加速度计和3个微磁力计。它们直接固联于运动环节上 ,测得信号是沿运动环节坐标系各轴相对于惯性空间的角速率、线加速度和磁力数值。采集频率100 Hz,角速度测量范围±1 200°/s,线加速度测量范围±16 g,磁力计测量范围±1 200 μT〔3~5〕。所用控制单元采用具有ARM Cortex-M3处理器的32位单片机STM32F103来完成控制、数据采集与处理、数据通讯等功能。线性加速度数据通过归一法减少由于各轴量度差异引起的误差。调整传感器姿态变化,使X、Y、Z轴测试到相应的最大值、最小值Axmax、Axmin;Aymax,Aymin;Azmax,Azmin。归一法公式如下:
(1)
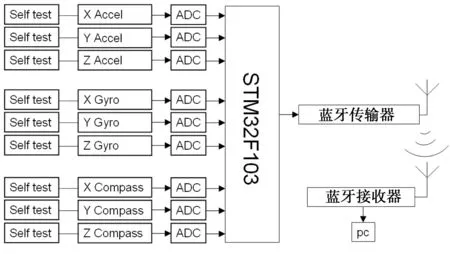
图2 姿态测量系统内部结构
其中Ax′、Ay′、Az′分别为X、Y、Z轴实测数据,Ax、Ay、Az为归一化后数据。陀螺仪采用三维转合全温标定和最小二乘直线拟合,来修正陀螺仪积分角度误差,减少陀螺仪的漂移影响。
磁力计通过立体8字校准方法,确定固定磁场干扰矢量的大小及方向。使需要校准的传感器在空中做8字晃动,尽量多地让传感器法线方向指向空间的所有8个象限,通过足够的样本点求出固定磁场干扰矢量的大小及方向。公式如下:
(Mx-γx)2+(My-γy)2+(Mz-γz)2=R2
(2)
其中Mx、My、Mz分别为X、Y、Z轴实测数据,γx、γy、γz分别为固定磁场干扰矢量在X、Y、Z轴上的分量,R为常量〔6~9〕。通过卡尔曼滤波对采集的数据融合,使采集的数据更接近真实值〔10,11〕。为了避免欧拉角形式产生的万向轴锁死,构造的姿态数据采用四元数形式。求解方程如下:

(3)
q是四元数矢量,ωx、ωy和ωz是ω的分量。解上述方程,获得四元数形式表示的姿态。由于四元数形式不能直观表示各轴角度变化,将四元数转化为欧拉角形式,公式如下:
(4)
其中,q0、q1、q2和q3是q的分量。φ、θ、ψ分别表示欧拉角的自转角、俯仰角和航向角,定义如图3。
最后将导航参数处理成所需的数据格式。为数据添加数据头和校验位,以减少蓝牙无线传输时可能出现的误读操作。通过蓝牙发射端发射,无线传输给连接在电脑的蓝牙接收端,数据进入运行于电脑上的软件。
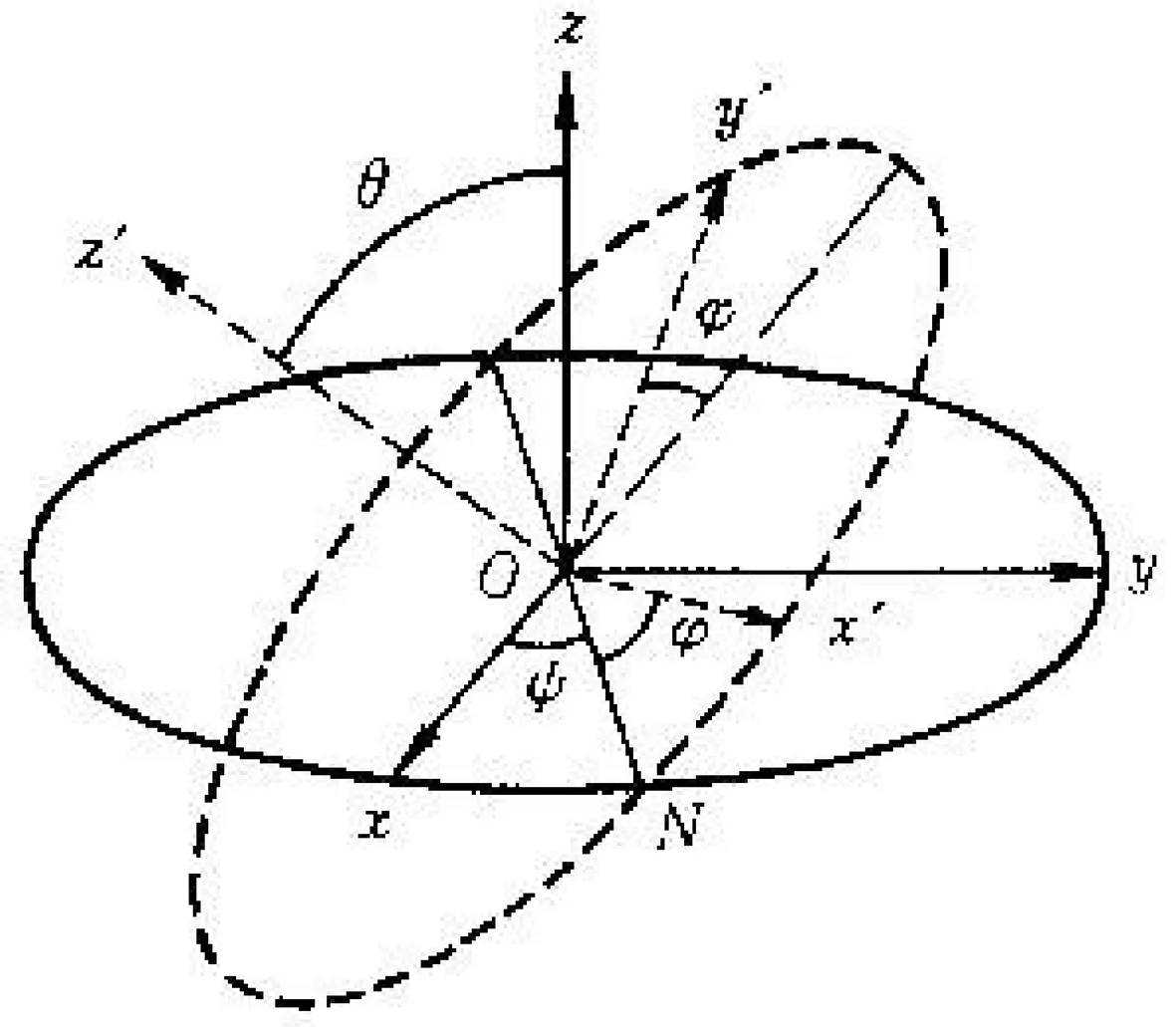
图3 欧拉角定义
1.2.2系统软件 可在windows操作系统平台上运行,利用VC++6.0语言编写而成。包括受试者数据库、测试界面和测试结果分析界面三个模块,如图4。受试者数据库管理受试者信息,包括姓名、性别、年龄、身高、体重等。可便捷地对受试者信息进行新增、修改、删除、查找等操作。测试界面包括控制窗口,测试环节OPENGL三维骨骼显示,测试数据柱状图显示,曲线图显示,目标角度、重建角度、差值等数据显示。在软件中显示的数据名称会根据实际测试关节而自动变化。如在测试颈椎本体感觉时,欧拉角中的俯仰角、自转角和航向角分别对应颈椎的屈伸、侧屈、旋转关节角度,软件测试界面如图5。测试结果分析界面包括单人纵向和多人横向数据分析,数据显示包括数值显示、二维和三维柱状图、曲线图、饼图等形式,盒子图、叠加图和散点图等,并可打印。

图4 老年人三维本体感觉测试系统软件结构图

表1 8名受试者本系统和BIODEX获得目标角度和重建角度之间差值对比±s,°)

图5 老年人三维本体感觉测试系统软件测试界面
2 实验测试及有效性检验
2.1测试 将受试者测试关节的近端环节固定,惯性传感器通过绑带绑在测试关节的远端环节上。给受试者带上眼罩和耳麦,屏蔽视觉和听觉对本体感觉测试结果的影响。操作系统软件,进入受试者数据库,录入受试者的信息;进入测试界面,单击开始按钮,建立传感器和电脑之间的连接。使受试者测试关节保持中立位,单击初始化按钮,使三轴角度值归零。受试者在听到开始指令后,主动将测试关节运动于某一屈曲角度,作为目标角度,停留3 s,并按下手持按钮,使电脑软件记录当前角度值,作为目标角度数值。让受试者注意感受关节的位置,然后再令受试者返回测试关节中立位,通过主动运动并依靠自我判断重建上述角度,并按下手持按钮,使电脑记录下当前角度值,作为实测角度数值。最后,电脑软件会自动计算目标角度和重建角度在三个轴上的差值,用来反映角度重建的精确度〔12~15〕。
2.2有效性检验 随机抽取8名男性老年人,年龄(67.5±3.11)岁,身高(170.25± 3.82)cm,体重(72.11±3.45)kg,每个老年人都通过BIODEX和老年人三维本体感觉测试系统两种仪器进行右膝关节本体感觉测试。采用SPSS软件进行正态性检验分析及配对t检验〔19,20〕。膝关节角度定义为大腿和小腿之间夹角,起始角度90°,目标角度120°,每人记录3次结果,取平均值。用获得目标角度和重建角度之间的差值来反映角度重建的精确度〔16~18〕。两组结果没有显著差异(t=0.786,P=0.458)。见表1。
3 讨 论
本研究研发的老年人三维本体感觉测试系统能够测试各关节的三维本体感觉,尤其是小关节本体感觉,能方便携带到康复大厅、病房等场合,在老年人健康评估、康复进程监控、伤残评定等多个方面都有非常重要的应用。
4 参考文献
1纪仲秋,李建设.运动生物力学〔M〕.北京:高等教育出版社,2000:62.
2赵焕彬,李建设.运动生物力学〔M〕.北京:高等教育出版社,2008:198.
3黎永键,赵祚喜,高俊文.MEMS惯性传感器ADIS16355在姿态测量中的应用〔J〕.数据采集与处理,2012;4(27):502-5.
4胡士峰,马建仓.基于MEMS 陀螺和加计的微惯性测量单元研制〔J〕.航空计算技术,2008;38(6):115-8.
5秦 辉,史步海.一种微惯性测量系统设计研究〔J〕.电子工艺技术,2009;30(1):32-4.
6Kim S,Crassidis JL,Yang C,etal.Kalman filtering for relative spacecraft attitude and position estimation〔J〕.J Guidance Control Dynam,2007;30(1):133-43.
7Ang WT,Khosal PK,Riviere CN.Nonlinear regression model of a low-g MEMS accelerometer〔J〕.IEEE Sensor J,2007;1(7):81-7.
8Song LJ,Qin YY.Six position testing of MEMS accelerometer〔J〕.Measur Control Technol,2009;28(5):11-3.
9Johann B,Lauro O,Surat K.Heuristic reduction of Gyro drift for personnel tracking system〔J〕.J Navig,2008;62(1):41-58.
10陈 哲.捷联惯导系统原理〔M〕.北京:中国宇航出版社,1986:35-80.
11陈永冰,钟 斌.惯性导航原理〔M〕.北京:国防工业出版社,2007:13-23.
12Panics G,Tallay A,Pavlik A,etal.Effect of proprioception training on knee joint position sense in female team handball players〔J〕.Br J Sports Med,2008;42(6):472-6.
13张秋霞,花秀琴,施永健,等.踝关节本体感觉的测量方法研究与应用〔J〕.中国组织工程研究与临床康复,2011;15(35):6619-23.
14Nagai T,Sell TC,Abt JP,etal.Reliability,precision,and gender differences in knee internal/external rotation proprioception measurements〔J〕.Phys Ther Sport,2012;13(7):233-7.
15Changa AT,Lee SJ,Zhao H,etal.Impaired varus valgus proprioception and neuromuscular stabilization in medial knee osteoarthritis〔J〕.J Biomech,2014;47(2):360-6.
16Panichia R,Botti FM,Ferraresi A,etal.Self-motion perception and vestibulo-ocular reflex during whole body yaw rotation in standing subjects:the role of head position and neck proprioception〔J〕.Hum Mov Sci,2011;30(2):314-32.
17Bock O,Thomas M.Proprioception plays a different role for sensorimotor adaptation to different distortions〔J〕.Hum Mov Sci,2011;30(3):415-23.
18Randa MK,Wang L,Müsseler J,etal.Vision and proprioception in action monitoring by young and older adults〔J〕.Neurobiol Aging,2013;34(7):1864-72.
19Jua YY,Liu YC,Cheng HY,etal.Rapid repetitive passive movement improves knee proprioception〔J〕.Clin Biomech,2011;26(2):188-93.
20Fautrellea L,Gueugnon M,Barbieri G,etal.Inter-hemispheric remapping between arm proprioception and vision of the hand is disrupted by single pulse TMS on the left parietal cortex〔J〕.Brain Cogn,2013;82(2):146-51.
