一种用于VTS导航雷达中浮标丢失告警技术
2014-09-08练学辉
练学辉,丁 春,李 栋
(1. 海军驻南京地区雷达系统军事代表室,南京210003; 2. 中国船舶重工集团公司第七二四研究所,南京211153)
一种用于VTS导航雷达中浮标丢失告警技术
练学辉1,丁 春2,李 栋2
(1. 海军驻南京地区雷达系统军事代表室,南京210003; 2. 中国船舶重工集团公司第七二四研究所,南京211153)
浮标作为一种助航设施在水面安全航行方面具有重要的作用。同时,由于雷达视频中浮标的信杂比不高,对浮标的监视一直以来面临着极大的困难。本文首先利用电子海图提供了一种对于浮标的自动定位技术,根据定位信息实现了对于浮标的丢失告警。
VTS;导航雷达;浮标; 丢失告警
0 引 言
浮标是一种浮于水面的航标,锚定在指定位置,用以标示航道范围、指示浅滩、碍航物或表示专门用途的水面助航标志,在水面安全航行方面具有重要的作用。浮标的一端系于水底,由于碰撞、走锚等原因可能导致浮标丢失,有必要对浮标的丢失及时进行告警。另外,对于水面小目标、慢速(2~3 kn以下)目标的跟踪,一直以来面临着极大的困难。原因之一是由于其信杂比不高,检测概率低;原因之二是对于水面固定的或者慢速目标,由于波浪以及导航雷达方位分辨率的原因,导致雷达目标点迹在方位上呈现摇摆的特点[1]。
为此,本文提出了首先依据电子海图对浮标进行自动定位,再根据位置实现浮标的丢失告警。
1 自动定位技术
对浮标进行自动定位是指以电子海图中浮标的位置为初步信息,经过对雷达视频中浮标回波进行处理,并提取浮标位置的过程。为了确保浮标定位信息有效,最后需要人工确认。
1.1 具体步骤
为了对浮标进行定位,需要执行以下步骤:
(1) 在电子海图中获取浮标相对于雷达的极坐标值(距离和方位)
电子海图中提供包括浮标在内的多种信息,可以直接获取浮标的地理坐标。根据浮标的地理坐标和雷达的地理坐标,可以计算出浮标相对于雷达的极坐标值(距离和方位)。
(2) 设置浮标定位窗口
电子海图与雷达视频之间存在不可能完全消除的系统误差,雷达视频中浮标的位置与根据电子海图计算出的浮标的极坐标值之间存在一定的系统误差。浮标定位窗口指以根据电子海图计算出的浮标的极坐标值为中心,具有一定距离宽度和方位宽度的扇形窗口。该扇形窗口的大小应当考虑系统误差和浮标回波大小,并且该扇形窗口内应当仅仅含有此浮标一个固定目标,不能包含其他的固定目标。
(3) 脉组积累
脉组积累是通过将一定方位宽度内的脉冲相加取均值得到的。采取脉组积累有两个主要的益处:
(a) 通过脉组积累可以改善最小可检测信噪比。对于VTS中的导航雷达,波束宽度为0.3°,脉冲方位间隔是0.06°或0.12°。若将脉组积累时方位宽度设为0.15°,则一个脉组包含1~2个脉冲。若脉组内含有2个脉冲,则对于非起伏目标,单个脉冲的最小可检测信噪比总的增益为1.62~2.64 dB[2]。
(b) 将脉冲脉组化,意味着可以对不同天线周期中相同脉组序号的脉冲进行相加、比较等运算,为后续的多周期反馈式积累提供支持。
(4) 锐化处理
一般而言,浮标的尺寸比较小,强反射点不多,浮标回波的信噪比不高。需要对浮标定位窗口进行锐化处理,使得该窗口的边缘、轮廓线以及细节特征变得清晰,提高窗口内各雷达分辨单元幅度的对比度。
对雷达视频进行锐化处理的公式为
y=x2/C
(1)

(5) 多周期反馈式积累
多周期反馈式积累的公式是
(2)

对浮标定位窗口进行多周期反馈式积累,可以抑制气象杂波、海杂波等在周期间不相关的杂波,改善最小可检测信杂比。如果用2个周期进行多周期反馈式积累,则对于非起伏目标,单个脉冲的最小可检测信杂比的增益为1.62 dB。

(6) 二维单元平均恒虚警率检测
浮标定位窗口检测采用二维单元平均恒虚警率检测,即在浮标定位窗口中首先计算出所有雷达分辨单元上的平均幅度作为噪声功率的估计值,再以
(3)

(7) 点迹凝聚
浮标定位窗口中的点迹凝聚采用强连通法,即要求点迹中相邻雷达分辨单元之间的距离偏移量或者脉组序号之差不大于1。
如果浮标定位窗口内凝聚出多个点迹,因为不清楚是由于有船只进入了定位窗口,或者是由于杂波的干扰,为了严格确保浮标定位的准确性,将当前周期内浮标定位窗口中的点迹都认为无效。
(8) 点迹位置信息统计
(9) 电子海图人工确认
1.2 实验分析
对某日大桥站雷达视频中大桥附近4个浮标进行定位,检测概率PD设为0.9。在第70个天线周期后,准确定位3个浮标。另一浮标定位失败的原因是在后30个周期中,该浮标窗口内有船只经过,不满足浮标窗口内点迹唯一的要求,导致有效点迹数<30×PD。成功定位的3个浮标的距离标准差和方位标准差见表1。

表1 成功定位的3个浮标的距离标准差和方位标准差
雷达的距离精度为3.75 m,方位精度为0.15°。对于长江中位置基本不变或者变化很小的浮标而言,浮标定位过程中采用的脉组积累、锐化处理、多周期反馈式积累等措施提高了浮标的信杂比,使得成功定位的3个浮标的距离标准差远小于雷达的距离精度和方位精度。
2 对于浮标的丢失告警技术
对于浮标的丢失告警技术主要依赖于在浮标告警窗口中进行区别于自动定位过程中的信号处理,以及将雷达点迹与浮标定位位置进行关联判断来实现。
2.1 具体步骤
对浮标的丢失告警按照图 1所示的处理流程,其中脉组积累、锐化处理、二维单元平均恒虚警率检测、点迹凝聚与自动定位中的相同。
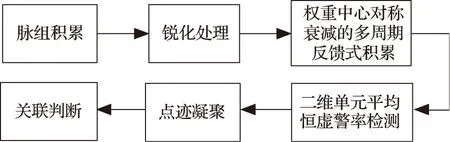
图1 浮标丢失告警处理流程
多周期反馈式积累在浮标告警窗口中各脉组采取的权重都相同。当浮标告警窗口中有船只经过时,由于在浮标告警窗口中含有船只,噪声功率的估计值偏大,导致对浮标的检测概率降低,即“遮蔽”效应。为此,在多周期反馈式积累时,浮标告警窗口中方位向靠近边界的脉组所用的权重应当比中心脉组小,并且与中心脉组的序号相差越大权重越小。记中心脉组所用权重为α0,某脉组与中心脉组的序号差的绝对值是n,衰减系数c<1,则此脉组在多周期反馈式积累时所用权重α=α0×cn,此即权重中心对称衰减的多周期反馈式积累。浮标告警窗口边界在多周期反馈式积累时所有权重比中心脉组所用的权重小,收敛所需周期比中心脉组的大。如果权重足够小,收敛周期数远大于船只回波在浮标告警窗口中存在的周期数,当船只经过浮标告警窗口边界时,将不会对浮标产生“遮蔽”效应。
对浮标告警窗口内所有点迹根据式(4)计算与浮标定位位置的关联距离:
(4)
其中,d0和θ0分别表示浮标定位的距离和角度,d1和θ1分别表示浮标告警窗口内点迹的距离和角度,σd和σθ分别表示浮标告警窗口内点迹的距离精度和方位精度。
选择浮标告警窗口内关联距离dis最小且关联距离dis<关联门限T的点迹作为关联点迹。在连续30次扫描中,在浮标告警窗口中都未成功关联点迹则宣布浮标丢失,向用户提出浮标丢失的告警信息。
2.2 实验分析
根据第1.2节中计算出的3个浮标的定位位置,从第71个周期开始对3个浮标进行实验。在实验中,为了验证浮标丢失告警,从第100个周期开始,将第2个浮标所在告警窗口每个周期向远处移动一个雷达分辨单元,直到第2个浮标所在告警窗口内的视频全部移出为止,并且之后所有周期内该告警窗口内的雷达视频都保持在第2个浮标所在告警窗口之外。
图 2为第120个周期时经过脉组积累、锐化处理、权重中心对称衰减的多周期反馈式积累、二维单元平均恒虚警率检测和点迹凝聚后3个浮标所在区域的B显图。图 3和图 4中白色方框即为3个浮标告警区域,左侧第2个告警区域上方的白色部分是移出告警窗口的第2个浮标。图 5和图 6中黑色方框为3个浮标告警区域。图 2中的第1个浮标淹没在杂波中,经过脉组积累、锐化等处理后可以被检测到,并凝聚成点迹。图 5显示在第120个周期时,第2个浮标告警窗口中没有任何雷达分辨单元的幅度超过检测门限。图 6中最左侧和最右侧黑色方框中的白色十字为第1个和第3个浮标凝聚的点迹。
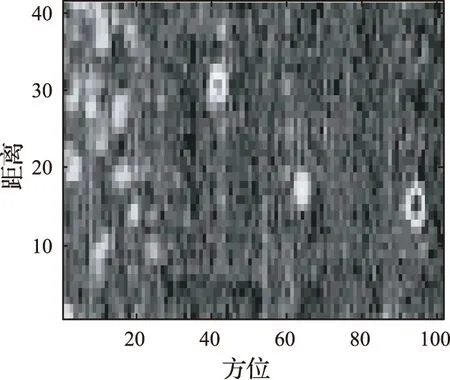
图2 脉组积累效果示意图

图3 锐化处理效果示意图

图4 权重中心对称衰减的多周期反馈式积累效果示意图
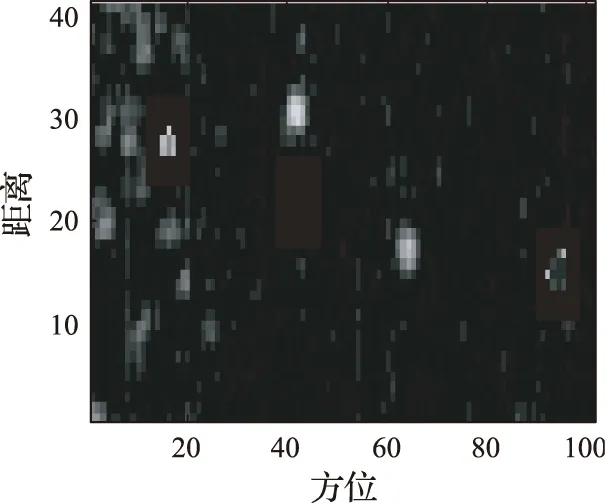
图5 二维单元平均恒虚警率检测效果示意图
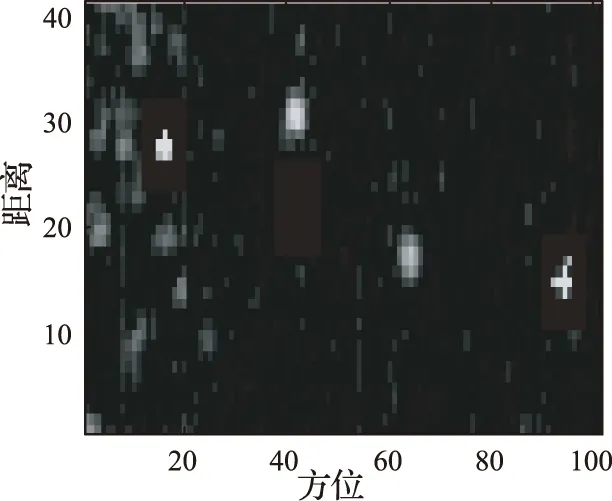
图6 点迹凝聚效果示意图
从第120个周期开始至第150个周期为止,第2个浮标所在告警窗口内的点迹数都为0,在第150个周期天线扫描过第2个浮标所在告警窗口时,向用户发出告警信息。
3 结束语
为了解决浮标丢失及时告警的问题,本文提出了首先利用电子海图对浮标进行自动定位、再利用定位位置信息实现浮标丢失告警的方法。经实验验证,此方法可以及时发现浮标丢失。另外,自动定位技术也可以用于对雷达进行标校;对关注区域进行锐化并多周期积累的方法,也可以用于对慢速(2~3 kn以下)目标的跟踪。
[1] John N.Briggs,等.航海雷达目标检测[M]. 北京:电子工业出版社,2009.1.
[2] Mark A. Richards.雷达信号处理基础[M]. 北京:电子工业出版社,2008.6.
[3] 王小谟,匡永胜,陈忠先,等.监视雷达技术[M].北京:电子工业出版社,2008.1.
A technology of buoy loss and alarm for navigation radars in VTS
LIAN Xue-hui, DING Chun, LI Dong
(1. Military Representatives Office of Radar System of the Chinese PLA Navy in Nanjing,Nanjing 210003; 2. No. 724 Research Institute of CSIC, Nanjing 211153)
The buoy as a navaid has a significant effect on surface safety and navigation. At the same time, the signal-to-clutter ratio (SCR) of the buoys in radar videos is low, which makes it extremely difficult to monitor the buoys. A technique of automatically locating the buoys through the e-chart is provided. Based on the locating information, the loss and alarm of the buoys are realized.
VTS; navigation radar; buoy; loss and alarm
2013-12-25;
2014-01-15
练学辉(1965-),男,高级工程师,研究方向:雷达总体技术;丁春(1983-),男,工程师,硕士,研究方向:雷达数据处理;李栋(1985-),男,工程师,硕士,雷达数据处理。
TN967.7
A
1009-0401(2014)01-0015-04