大型数字相控阵雷达标校方法探究
2014-09-08李武,查林
李 武,查 林
(中国电子科技集团公司第三十八研究所, 合肥230088)
大型数字相控阵雷达标校方法探究
李 武,查 林
(中国电子科技集团公司第三十八研究所, 合肥230088)
对大型数字相控阵雷达采用的常规标校、恒星标校和卫星标校这三种标校方法进行了比较分析,论证了该雷达的标校流程,对采用卫星标校的精度进行了模型建立及仿真分析。
雷达;标校;恒星;卫星;仿真
0 引 言
雷达对目标位置测量的误差包含系统误差和随机误差两个部分。随机误差可以通过平滑、滤波等数据处理方法予以消除,而系统误差须通过数值修正得到降低,修正的好坏或者说修正剩余有多少取决于修正的数学模型和修正用的误差系数精确与否。误差系数依靠雷达系统标校手段来获得,误差系数愈精确,那么修正愈好。雷达的标校包括标定和校准两部分工作,标定是给出系统误差系数,校准是采取措施减小或消除系统误差。实际工作中,这两部分工作往往是结合在一起进行的,统称为标校[1]。
常规雷达系统标校主要由标校塔、距离标等实现,但大型数字相控阵雷达天线系统庞大,自身惯性大,同时由于天线超高超大(其天线口径可达30~50 m),难以架设相匹配的标校塔和距离标等条件满足标校要求,因此必须研究先进的标校方法完成对大型数字相控阵雷达的系统误差标校。
1 标校方法分析
目前,雷达采用的标校方法主要有常规标校、恒星标校和人造地球卫星标校三种。
1.1 常规标校
一般使用校准塔、方位标等外部固定基准设备及水平仪、望远镜等观测仪器来标定零值、轴系误差等系统误差分量,其优点是稳定性好,但需要建立校准塔,移动性差,且全程需要人工干预,对雷达周围地貌也有一定要求。
对大型数字阵列相控阵雷达,由于其天线超高超大,难以架设匹配的标校塔和距离标,现以天线口径30 m的大型数字相控阵雷达为例,具体分析如下:
•雷达从地面到机械轴中心约20 m,按国军标要求,要在雷达阵地周围找到符合条件的建设5 ~ 6方位标的地理环境比较困难,而且要建标高20 m左右,抖动又能满足标校精度要求比较困难;
•利用距离标进行距离零值标定,必须建设高度超过100 m的距离标,同时还要满足之间无遮挡及精度要求,难度很大;
•依据雷达的天线口径规模及波束宽度,初步计算要建立标校塔的高度超过140 m,距离雷达约4 km,同时若需利用井子标及喇叭标定光电轴匹配,还需建立相隔约15 m远的两个标校塔。综合考虑阵地地形要求及标校塔建设难度,该标校塔的建设困难较大。
因此,本雷达用常规的标校方法难度大,效率低,并且对阵地地形要求苛刻,高精度标校塔、距离标的设施建设难度较大。
1.2 恒星标校
以恒星天体为基准目标,通过微光电视等光学设备获取测量数据解算雷达系统误差。其优点是标定过程人工干预少,但是受天气因素和空中遮挡影响大,且需要雷达具备微光电视设备支持。
1.3 卫星标校
以运行于空间近地轨道的人造地球卫星为基准目标,通过获取卫星精密轨道数据标定雷达系统误差,是目前较为先进的雷达标定技术。美国、俄罗斯等国广泛采用卫星标定方法标定其测量雷达、导弹预警雷达和空间监视雷达系统。
根据国军标GJB3153-1998《精密测量雷达标定与校正》文件,目前我国雷达测量误差标定普遍采用常规标定和恒星标定的方法,一般只标定设备的静态误差。这些方法不能充分反映雷达在跟踪过程中的实际误差,而且常规标定的校轴方法存在校轴精度差、电轴偏差读数误差大和校轴效率低的缺点。
卫星标校技术先进,标定范围广,自动化程度高,但必须具备一定的条件才能得到准确可信的标校参数。这些条件主要包括:跟踪卫星获取数据时,最好能够获取10圈次以上的数据,并确保有效数据在四个象限内的均匀分布,具有一定的冗余;设备状态稳定良好,主要战术技术指标满足要求,雷达时统能够提供准确的时间信号,雷达测量数据具有清楚的配时过程等。
针对大型数字相控阵雷达天线阵面巨大等技术特点,雷达将不建标校塔、距离标等常规标校设施,因此本雷达的常规标校只对雷达的大盘水平进行标定,为后续的标定方式提供必要的误差参数,便于对恒星及标校卫星的正确捕获。
如上分析,对大型数字相控阵雷达拟综合考虑采用卫星标校为主、恒星标校为辅相结合的方案。同时,为充分体现本雷达的数字化优势,标校全程采用自动化控制方式实现。
2 标校流程分析
针对本雷达的技术特点,在进行系统误差标校时,整个雷达工作流程如下:
(1) 接收测量任务
启动系统标校程序。
(2) 初始标定
首先采用常规标校方式完成对大盘水平的自动化标定,其误差参数作为初始值代入后续卫星标校参数中。
(3) 卫星标校
卫星标校是雷达系统标校的主要方式,从国际SLR卫星(Satellite Laser Ranging)预选星历中自动选取已知精密轨道数据的卫星进行跟踪测量,主要完成雷达系统的动态系统误差标校,其标定的误差数据进行雷达的系统误差修正。
(4) 恒星标校
恒星标校为雷达系统标校的辅助方式,启动自动化恒星标校模块,进入恒星标定程序,在满足气象、环境及合适的恒星条件下对一组空间均匀分布的恒星(20~30颗)进行全程自动跟踪测量和数据处理。恒星标校主要完成雷达系统的静态系统误差标校。
雷达系统标校整个流程如图1所示。
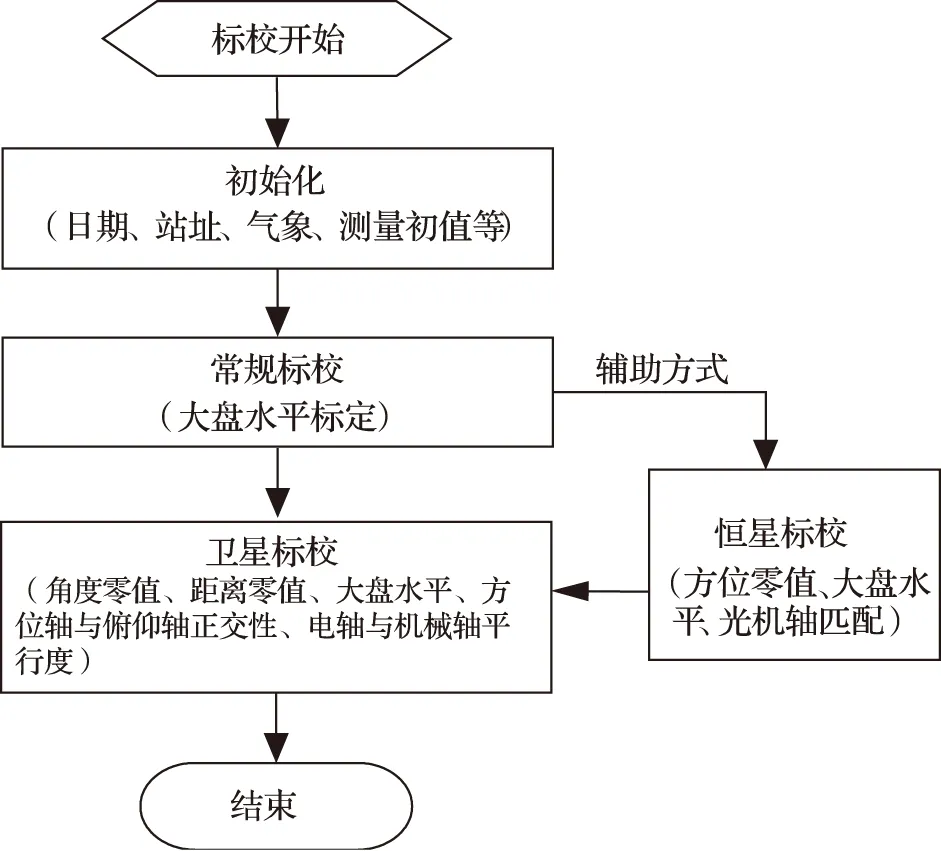
图1 雷达系统标校流程
整个系统标校自动化过程由主控分系统中自动化控制统一控制执行,通过计算机直接控制各标校设备工作状态及雷达伺服、标校工作状态等,其自动化控制如图2所示。
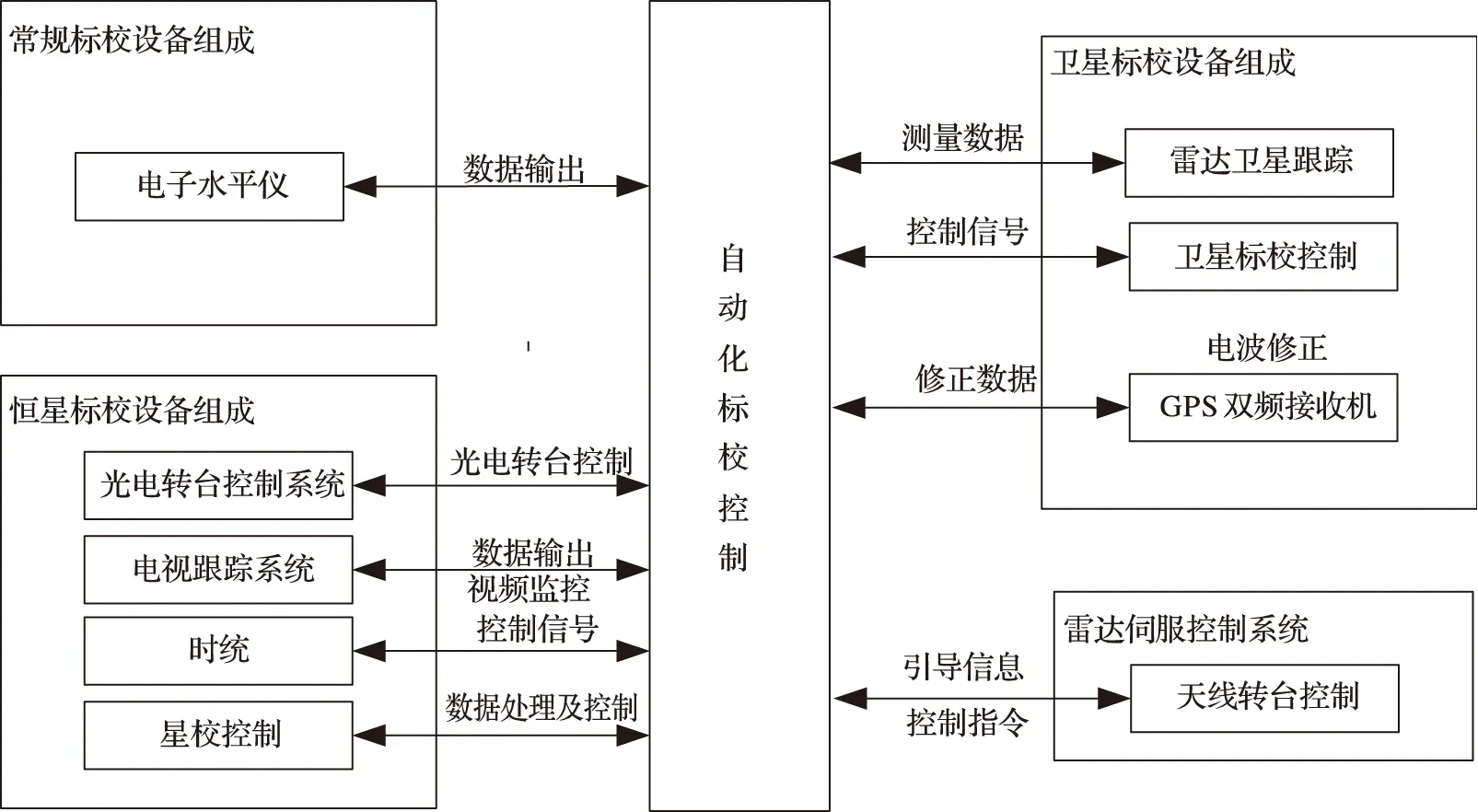
图2 雷达系统自动化标校控制组成示意图
雷达系统标校采用自动化工作方式,任务的控制由主控分系统中计算机统一调度管理。
3 标校精度分析
常规标校、恒星标校主要完成对该大型雷达的辅助标校、验证功能,在此不对其标校精度进行分析,本节仅对卫星标校进行分析。
3.1 卫星标校流程
雷达跟踪测量空间特定的卫星目标,获取测量数据;同时,获取该卫星对应于雷达测量弧段的精密轨道数据,将雷达测量数据与卫星精轨数据进行比对,利用最优化方法解算雷达误差系数,达到校准设备的目的。
采用精密定轨卫星标校方案首先必须掌握用于标校的卫星,也就是该卫星轨道根数不仅已知,而且经过多次改进,考虑各项摄动修正的情况下能提供短弧段高精度的卫星星历,这个高精度星历可作为卫星轨迹的“真值”使用。精密定轨卫星标校方案实现关键之处在于是否能提供高精度卫星星历,它与掌握的卫星根数的精确度有关,也与进行摄动修正计算模型有关[2]。
采用精密定轨方案实施卫星标定,卫星标校流程如图3所示。
3.2 测量误差模型的建立
采用卫星标定方法主要是修正测量设备的系统误差,其主要误差项包括:
(1) 轴系误差 大盘不水平、电轴与俯仰轴不正交引起的误差、俯仰轴与方位轴不正交引起的误差;
(2) 零值误差 方位、仰角、距离零值。
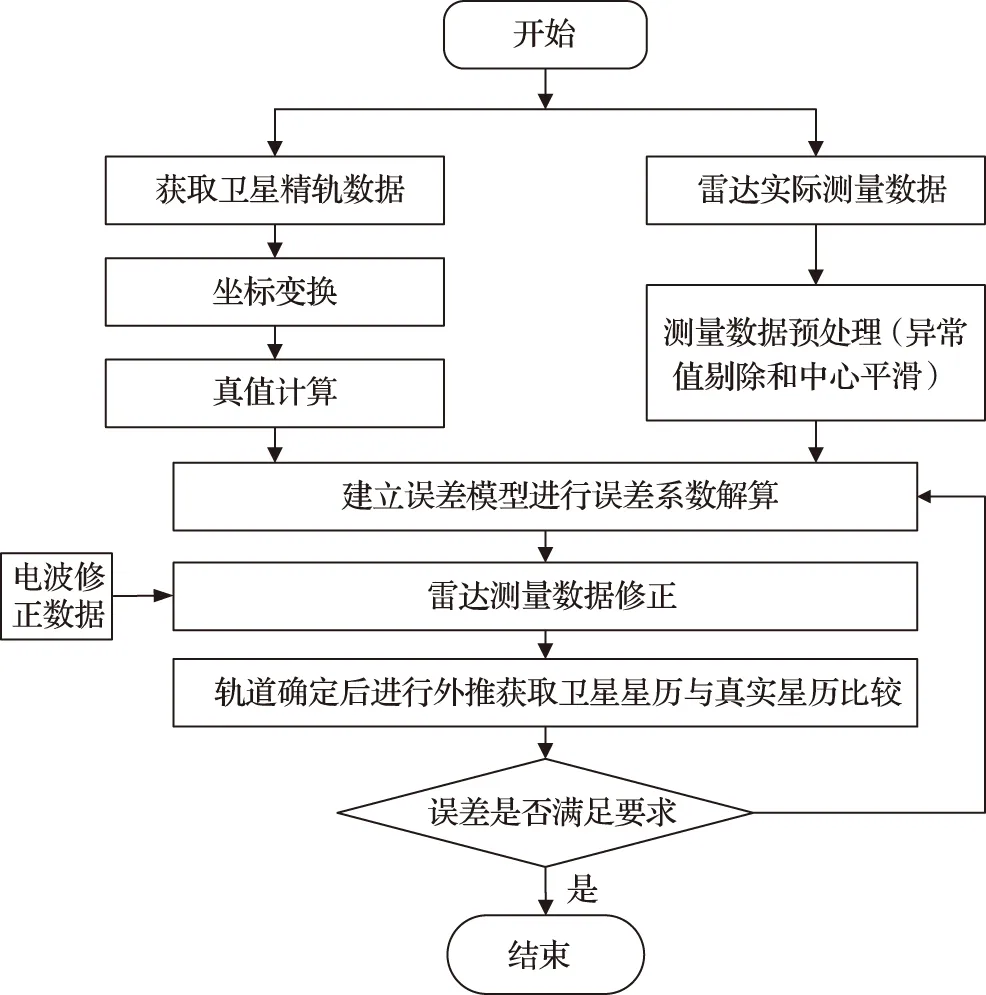
图3 卫星标定流程
根据以上所述的雷达测量误差的主要来源,可以建立以下误差模型:
△Ri=△R0+R1cscEi
△Ai=△A0+a1sinAitgEi+a2cosAitgEi+a3tgEi+a4secEi+a5sinAi+a6cosAi
△Ei=△E0+e1sinAi+e2cosAi+e3ctgAi+e4sinEi+e5cosEi
其中,△R0、△A0、△E0分别为距离、方位和俯仰零值;r1、e3分别为距离和俯仰角的电波折射修正残余系数;a1、e1、a2和e2分别为大盘不水平系数;a3为方位轴、俯仰轴不正交系数;a4为电轴机械轴不平行度系数;a5、a6为方位非线性系数;e4、e5为仰角非线性系数及重力下垂变形误差系数。
3.3 坐标转换
由于卫星轨道数据都是采用大地坐标系,雷达对目标的探测采用的是空间直角坐标系,因此存在着大地坐标系与空间直角坐标系之间的转换问题。
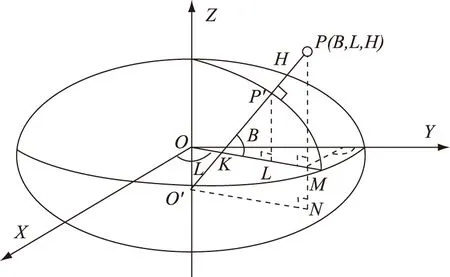
图4 大地坐标系与直角坐标系之间的转换关系
如图4 所示,如果已知空间某点的经度L、纬度B和高度H,对于空间中的同一点P(B,L,H),将其分别投影到直角坐标系XYZ中,就可以得到其直角坐标和大地坐标之间的转换关系为

地球长半轴a=6378137 m;
地球短半轴b=6356752.3142 m;
扁率倒数 1/α=298.257223563
3.4 误差系数的求解
误差系数求解可以采用最小二乘的高斯估计计算,定义误差系数构成状态矢量η,初始值设为η0,可建立下述观测方程:

3.5 标校精度分析
根据雷达参数,设置不同场景条件下实际卫星轨道参数,进行标校精度仿真分析。
(1) 卫星1
卫星1参数:轨道高度787 km,偏心率0.0001195,轨道平面倾角98.5433°,近地点幅角270°,升交点赤经351.19°,真近点112.44°。图5为卫星1轨道示意图。
图5 卫星1轨道示意图
(2) 卫星2
卫星2参数:轨道高度1787km,偏心率0.00011,轨道平面倾角108. 33°,近地点幅角200°,升交点赤经251.19°,真近点102.44°。图6为卫星1轨道示意图。
图6 卫星2轨道示意图
(3) 卫星3
卫星参数:轨道高度1300km,偏心率0.0007815,轨道平面倾角66.0442°,近地点幅角271.431°,升交点赤经212.592°,平近点角88.5802°。图7为卫星1轨道示意图。

图7 卫星3轨道示意图
计算系统误差[3]如表1所示,卫星标校误差仿真图如图8。
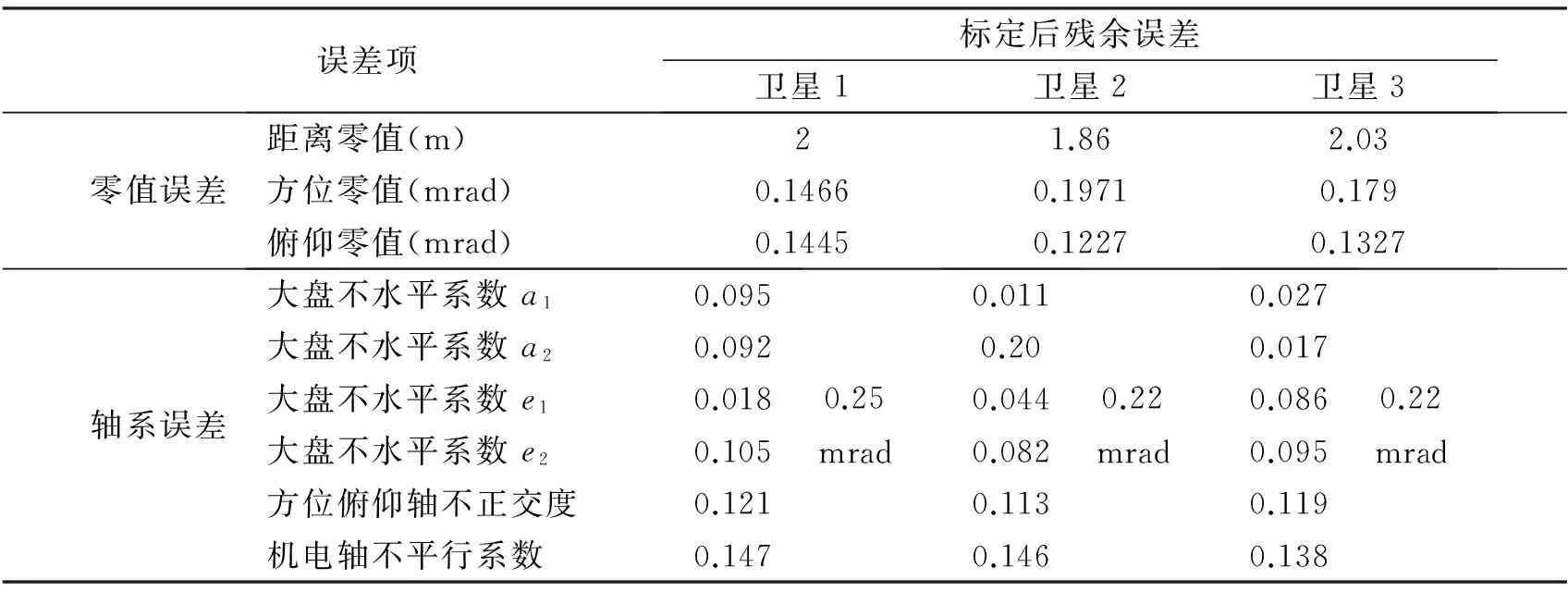
表1 卫星标校精度分析表
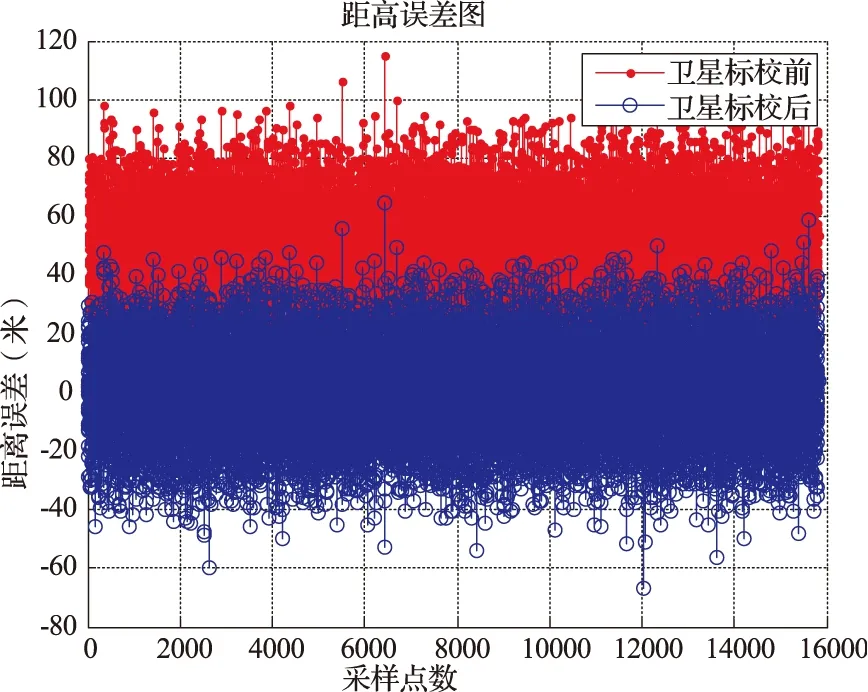
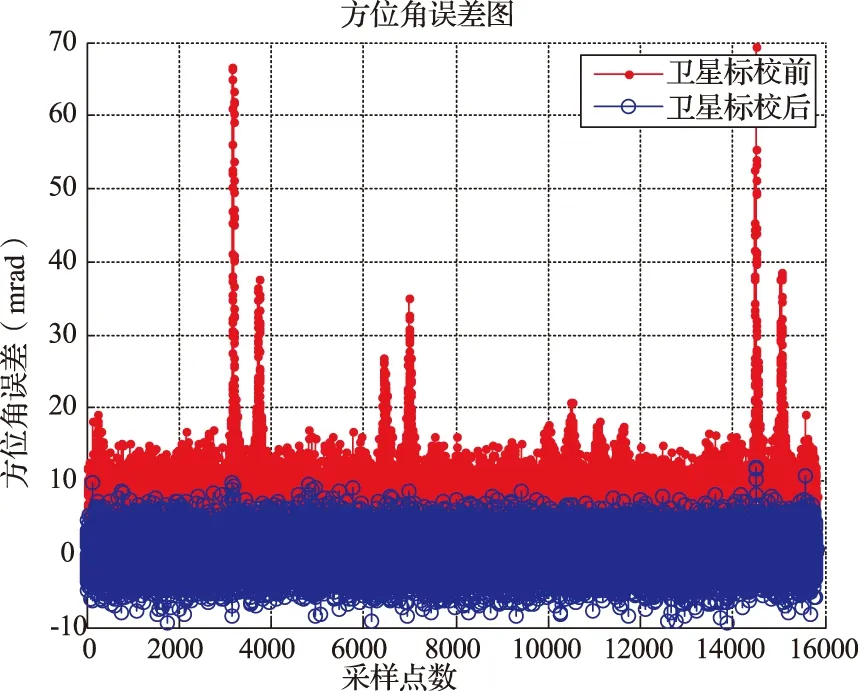
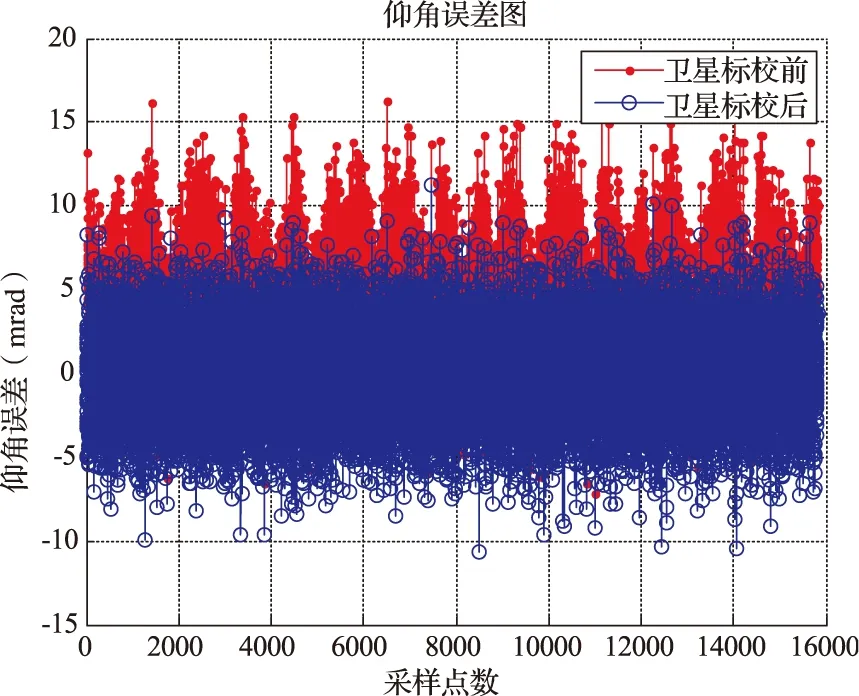
图8 卫星标校误差仿真图
4 结束语
通过对大型数字相控阵雷达的标校方法、标校流程及标校精度的分析,卫星标校的自动化程度高,标校过程中人工干预少,受天气和场地影响小,特别对大型雷达的标校具有广阔的应用前景。
[1] M I Skolnik.雷达手册[M].王军,林强,等译.北京:电子工业出版社,2003.
[2] 袁勇,李革,马鹏斌,廖杰. 雷达的卫星标定技术方法[J]. 陕西科技大学学报(自然科学版), 2008.
[3] 仇芝.脉冲雷达卫星标定方法的一种工程实现研究[J].飞行器测控学报,2010.
[4] 陈芳允.卫星测控手册[M].北京:科学出版社,1992.
[5] 黄捷.电波大气折射误差修正[M].北京:国际工业出版社,1999.
Research on calibration methods for large digital phased array radars
LI Wu, ZHA Lin
(No.38 Research Institute of CETC, Hefei 230088)
Three calibration methods for large digital phased array radars are compared and analyzed, including conventional calibration, star calibration and satellite calibration. The calibration process of such radars is demonstrated. Additionally, the precision of satellite calibration is modeled and simulated.
radar; calibration; star; satellite; simulation
2013-12-19
李武(1974-),男,高级工程师,研究方向:雷达系统工程和总体设计;查林(1979-),男,高级工程师,研究方向:雷 达系统设计、工程研制。
TN958.92
A
1009-0401(2014)01-0006-05
