基于Matlab的无刷直流电机仿真建模新方法
2014-09-07罗耀华王超逸
罗耀华,王超逸
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
基于Matlab的无刷直流电机仿真建模新方法
罗耀华,王超逸
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
在详细分析无刷直流电机(BLDC)数学模型的基础上,提出并设计无刷直流电机系统转速、电流双环控制策略。首先,在Matlab/Simulink中,分别使用已有模型,调用由Matlab语言编写的m函数及S函数构建模型3种方法,建立各子功能模块,并在此基础上根据控制系统原理建立无刷直流电机系统仿真模型。通过仿真与试验,验证该控制策略的正确性与有效性。
无刷直流电机;建模;仿真;Matlab
目前,电机在实际应用中已经从过去单纯提供动力转变为对转矩、速度等进行精确控制,无刷直流电机(Brushless DC Motora,BLDC) 这种耗能少、效率高、易于控制的新型机电一体化传动系统越来越获得普及。在无刷直流电机控制系统的设计过程中,采用高效合理的控制系统仿真模型,便于改变系统结构与参数、调整系统控制算法、加入实时的扰动,并能充分利用计算机仿真的优越性,有效地节省设计时间。
在Matlab环境下进行无刷直流电机控制系统仿真已经成为广泛关注的问题,例如:在电机控制系统分析时采用节点电流法,建立由M文件列写BLDC仿真模型,这种将电机视为一个整体的分析方法不便于修改控制算法;文献[1]为了克服这种不足,在Matlab/Simulink中组建了各种模块分别对应BLDC控制系统的各种功能,便于改变控制策略,但求取反电动势的方法采用快速傅里叶变换法(FFT),降低了仿真速度。本文针对上述问题,提出了一种将BLDC控制系统分单元建模的新方法,采用分段线性法求取梯形波反电动势克服了文献[1]存在的不足。
1 永磁无刷直流电动机(BLDC)的数学模型
无刷直流电机是一种典型的机电一体化产品,由电机本体、位置检测器、逆变器和控制器组成,其转子为永磁磁钢,产生梯形波的气隙磁场,定子为多相对称绕组,通入方波电流[2]。BLDC气隙磁场感应的反电动势与相电流都是包含大量高次谐波的非正弦波,如图1所示。与直、交轴变换理论相比,根据转子位置,将电机原有的相变量分段线性表示为建立数学模型的方法,会使仿真更加准确、方便。
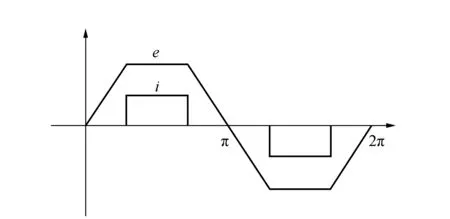
图1 A相反电动势和电流波形
本文采用两相导通星形三相六状态工作方式,对BLDC的数学模型及电磁转矩等特性进行分析,并假定:
1)定子绕组三相对称,参数相同;
2)电机的气隙磁感应强度近似为方波分布;
3)电枢反应不对气隙磁通产生影响;
4)电机中的涡流损耗与磁滞损耗近似为0;
5)定子齿槽不对系统产生影响。
1.1 电压方程
BLDC的电压平衡方程可表示成如下的状态方程形式:
(1)
式中:ua,ub,uc为每项定子的端电压,V;ea,eb,ec为每相定子的反电动势,V;ia,ib,ic为流经每相定子的电流,A;R为每相定子绕组的等效电阻,Ω;L为每相定子绕组的自感,H;M为每两相绕组之间的互感,H;P为微分算子,d/dt。
并且由于定子三相绕组为星形连接,且无中线对称,则有
ia+ib+ic=0.
(2)
则式(1)可改写为
(3)
式(3)所代表的是一个实现相间磁路关系解耦的相电压模型[3],等效电路如图2所示。
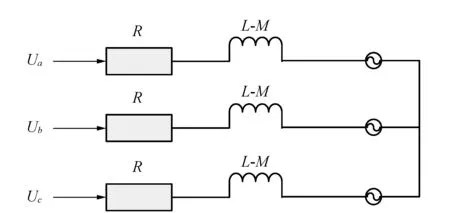
图2 永磁无刷直流电机等效电路
1.2 转矩方程
电机的电磁转矩由绕组的合成磁场和转子磁场相互作用产生[4],则
Te=(eaia+ebib+ecic)/ω.
(4)
式中:ω为BLDC的角速度,rad/s。
对于三相六状态无刷直流电机,由于在每个时刻,只会有两相定子导通,则电磁功率可表示为
Pe=(eaia+ebib+ecic)=2EsIs.
(5)
电磁转矩又可表示为
Te=Pe/ω=2EsIs/ω.
(6)
为了使电磁转矩保持恒定,定子中方形波电流的持续时间和反电动势梯形波的平顶部分均为120°电角度并严格同步。与普通的直流电机相似,直流无刷电机电磁转矩与电流幅值成正比,所以通过调节逆变器输出即可控制其转矩,进而实现无级调速。
1.3 运动方程
BLDC的运动方程[5]可表示为

(7)
式中:B为阻尼系数,N·m·s/rad;J为电机的转动惯量,kg·m2;TL为负载转矩,N·m。
2 基于Matlab的BLDC系统模型的建立
Matlab/Simulink可以通过使用现有模型、调用由Matlab语言编写y=f(u)形式的函数构成新模型和编写S函数构建模型三种方法进行建模。本文以BLDC的数学模型为基础,在Matlab7.1的Simulink 环境下,综合利用上述三种建模方法,对BLDC本体及其控制系统进行建模与仿真。系统设计框图如图3所示。
BLDC系统采用转速、电流双闭环控制:转速环采取PID算法,电流环采用滞环调节器。建模过程中将控制系统按照功能分割为子模块,如图4所示。
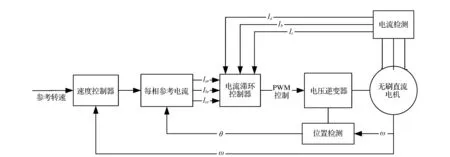
图3 BLDC控制系统整体框图
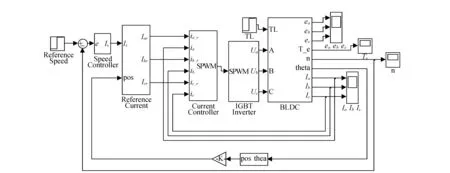
图4 Matlab/Simulink中BLDC仿真建模整体控制框图
2.1 BLDC本体模块
本系统中BLDC定子绕组为三相星形连接,无中线引出,各相绕组的电压、电流和反电动势的关系如下
(8)
式中:RLL表示2R,Ω;(L-M)LL表示2(L-M),H。
而由基尔霍夫定律可知
(9)
由式(8)和式(9)可以得到直流无刷电机本体模块结构如图5所示。
由电压方程式可得,三相电流信号ia,ib,ic要通过三相反电动势信号ea,eb,ec求取。因此,如何快速准确地求取梯形波反电动势成为BLDC建模过程中的关键问题,反电动势波形求取不准将导致相电流波形不理想、转矩脉动过大等问题,严重时将导致换向失败,以至电机失控。
反电动势的求取可采取以下方法:
1)傅里叶变换(FFT)法,FFT算法易于实现,但计算量过于庞大,影响了仿真运行的速度。
2)有限元法,采用有限元法可以求得脉动小、精度高的反电动势,但算法过于复杂,不便于实现。
3)分段线性法[6],此方法就是将无刷直流电机转子的一个旋转周期划分为6个状态,每相的反电动势在不同转子位置下,由转速信号进行不同的线性表示,对6个不同的直线方程求解就可得到梯形波反电动势。这种方法求解直线方程十分简单,在精度和速度上,都能够满足建模及仿真的需要。
通过上述三种反电动势求取方法的比对,本文采用分段线性法进行反电动势波形的求解。对于两相导通星形三相六状态的BLDC,每种运行状态中将包含两个开关管导通的单流模式和有续流二极管导通的换流模式。以0~π/3为例,A相和B相导通,反电动势为最大值±Em,C相处于换流阶段,反电动势由Em沿线性规律变化为-Em。在其他转速信号下,同理求出其他5个阶段三相反电动势直线方程,得到表1中的对应关系,采取分段线性法可以有效地求取BLDC梯形波反电动势[7-8]。
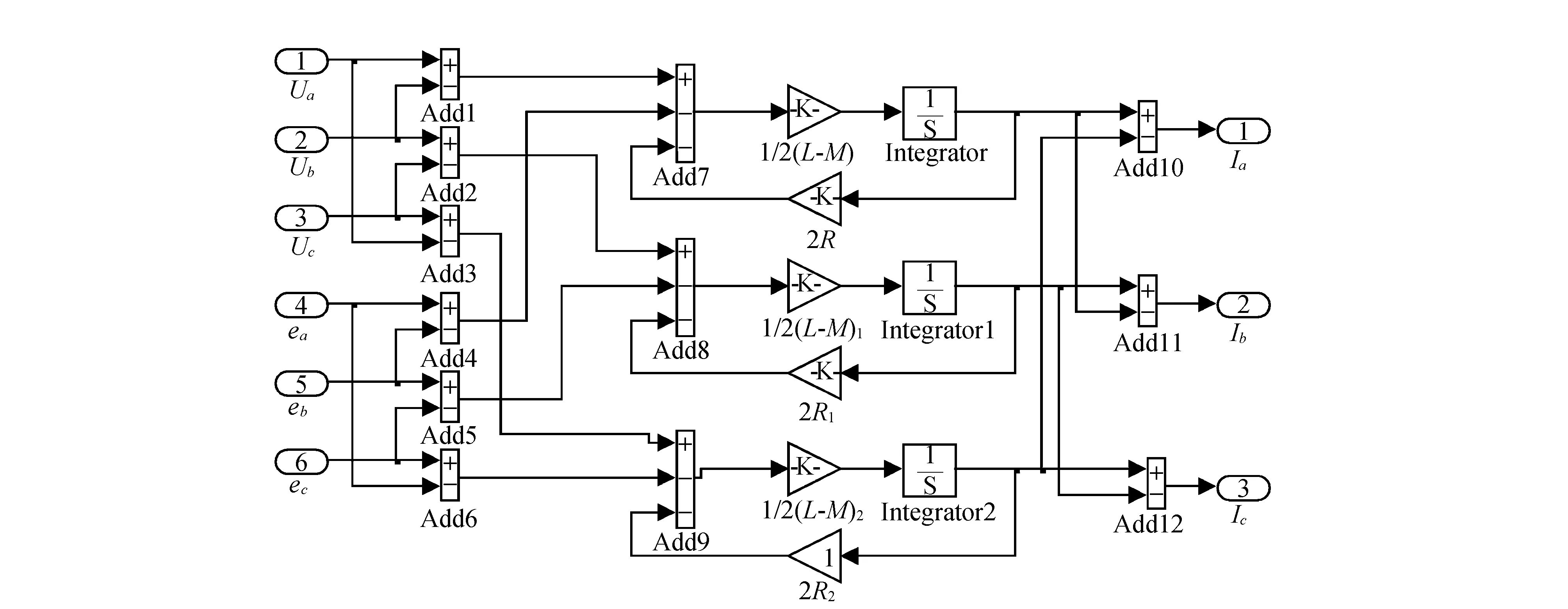
图5 BLDC本体电压方程模块
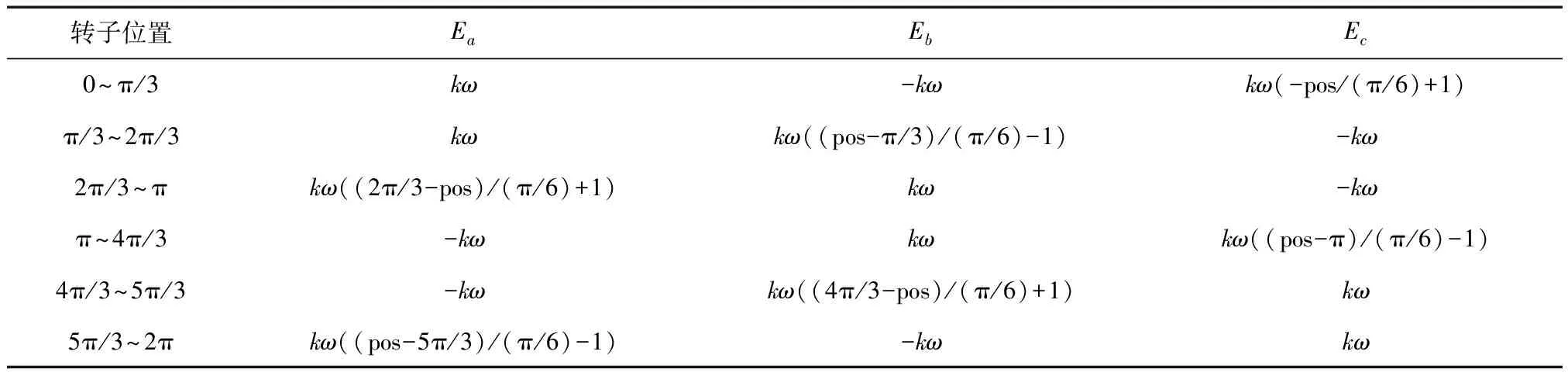
表1 转子位置与反电动势线性关系
表1中:k为反电动势系数,V/(r/min);pos为电角度信号,rad;ω为转速信号,rad/s。模块的功能通过编写Matlab Function中的函数实现,根据电机的电角度信号,使用不同的线性方程求取反电动势,模块的搭建方法见图6。
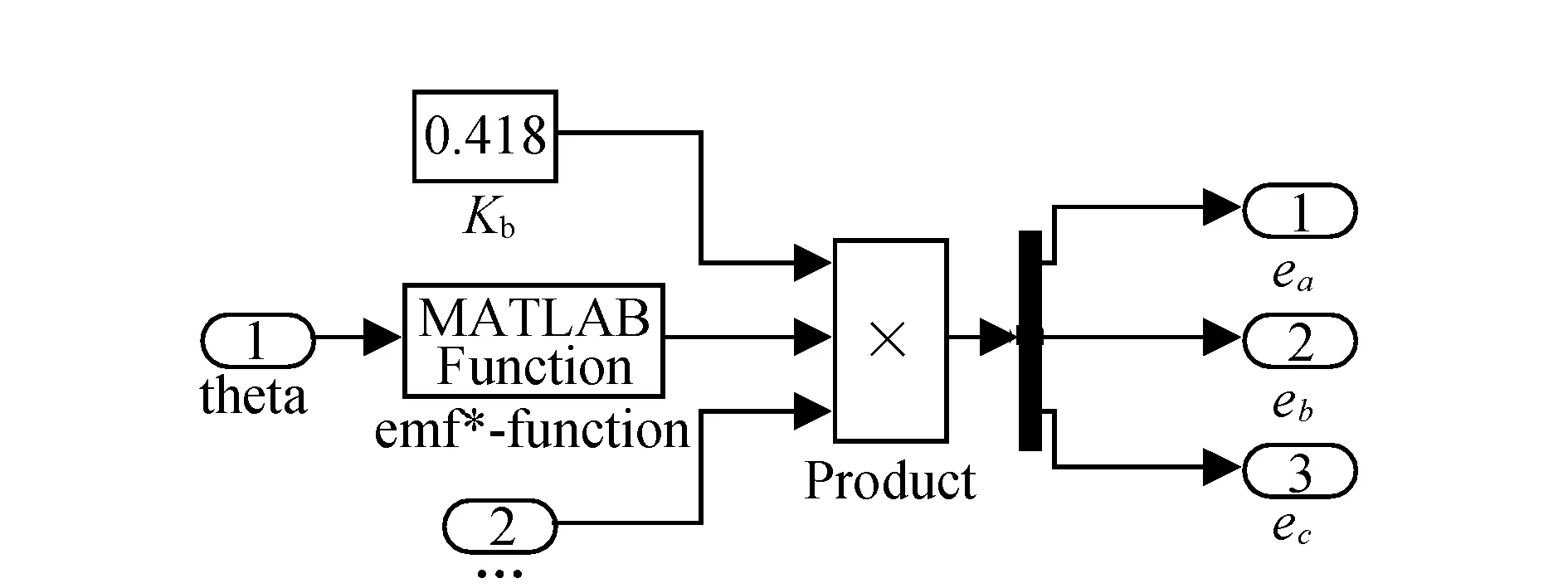
图6 反电动势模块
2.2 转矩与转速计算模块
BLDC的电磁转矩方程式(6)和运动方程式(7)可在一个模块中实现,如图7所示。模块的输入为电机的相电流与反电动势,输出为转速信号ω与电磁转矩信号Te,再将转速信号进行积分即可得到电机位置信号θ。
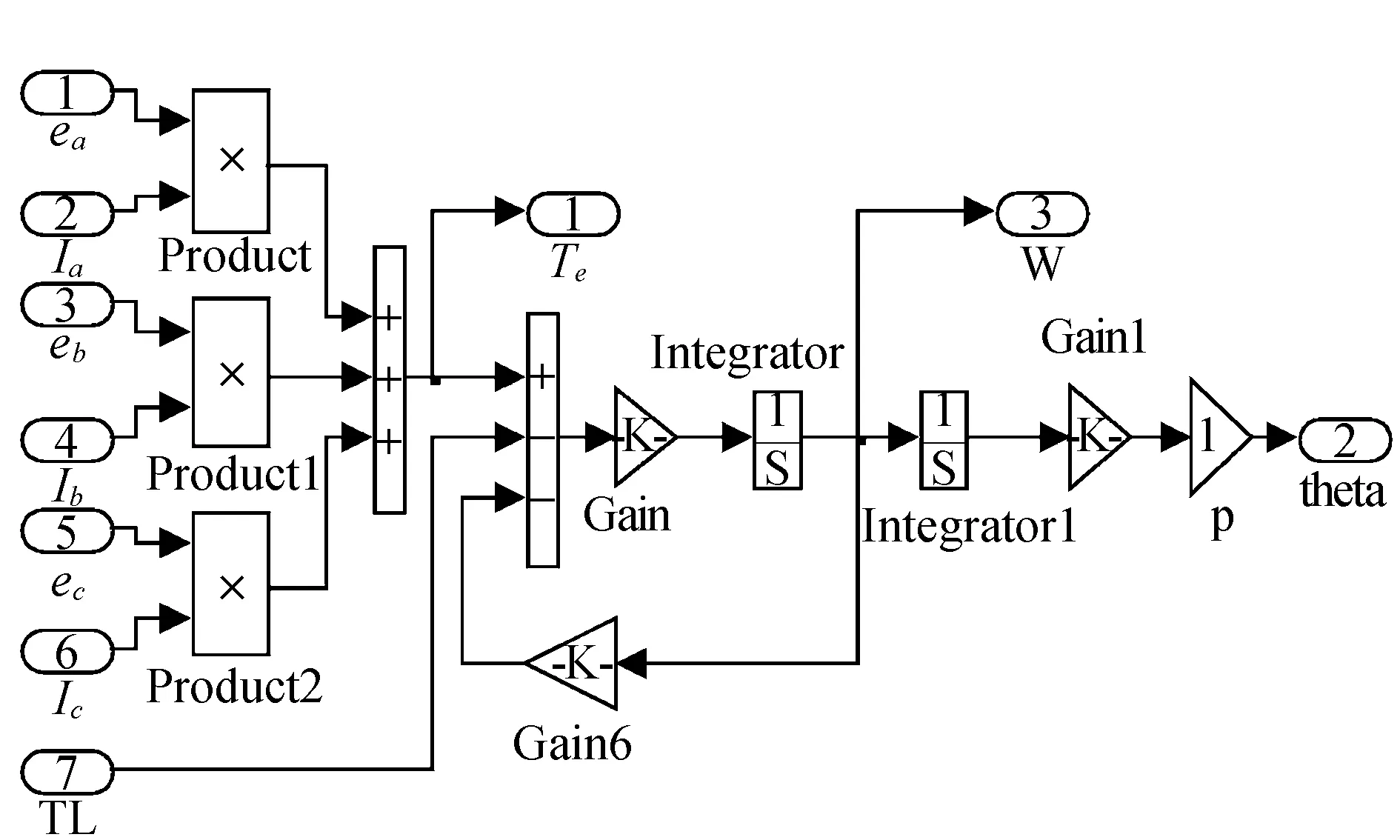
图7 转矩与转速计算模块
2.3 参考电流模块
参考电流模块是将由速度控制模块输出的电机转子的位置信号pos和电流幅值信号I作为输入信号,根据表2所示的转子位置与参考电流的对应关系,得到三相电流的参考值。
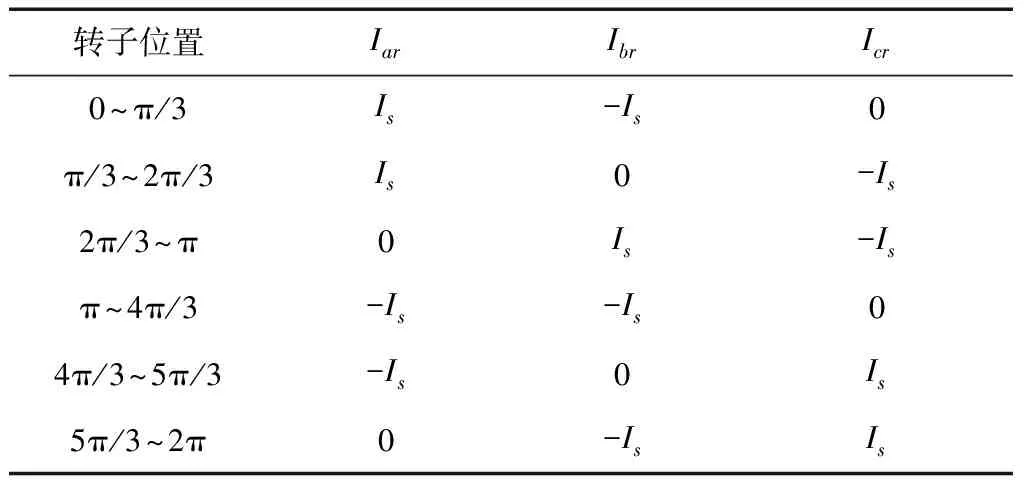
表2 转子位置与三相参考电流关系
根据上述分析,采用编写S函数建立模块的方式计算参考电流,输出的三相参考电流作为电流滞环控制模块的输入,经过与实际电流的比较,实现电流滞环控制。模型如图8所示。
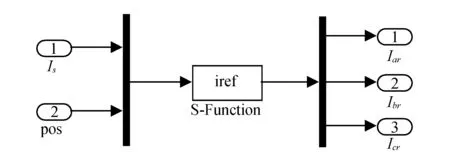
图8 参考电流模块
2.4 电流滞环控制模块
电流滞环控制模块输入三相实际电流与三相参考电流,输出PWM逆变器的控制信号[9]。模型如图9所示。
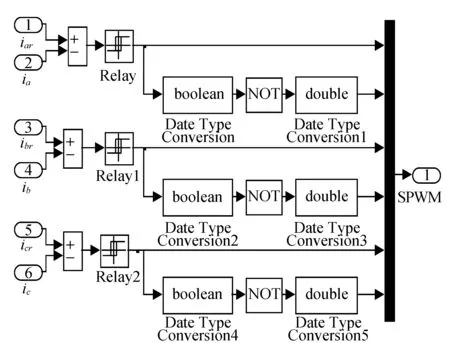
图9 电流滞环控制模块
2.5 速度控制模块
速度控制模块实现了无刷直流电机双闭环调速系统的转速闭环控制,采用传统PID调节器控制,模型如图10所示,其输入为系统的给定转速参考值与电机转速实际值之差——转速误差,输出量作为参考电流模块的输入——三相参考相电流的幅值Is。饱和限幅模块对输出相电流的幅值Is进行限定。

图10 速度控制模块
2.6 电压逆变器模块
BLDC控制系统中的电压逆变模块采用自行搭建方式,输入为电流滞环控制模块给出开关导通信号,输出为三相交流电压。逆变器由3对IGBT功率开关器件、反并联续流二极管构成三相逆变桥并封装。逆变器根据电流调节模块输出PWM信号,对开关管进行导通或关断操作,产生图1中的方波电流。
由于SimPowerSystem工具箱和Simulink工具箱不能直接连通,必须通过受控电压源等方式进行信号类型转换[10]。本文将逆变器输出的三相电信号分别输入至电压表,得到可以与BLDC直接连接的Simulink信号,如图11所示。
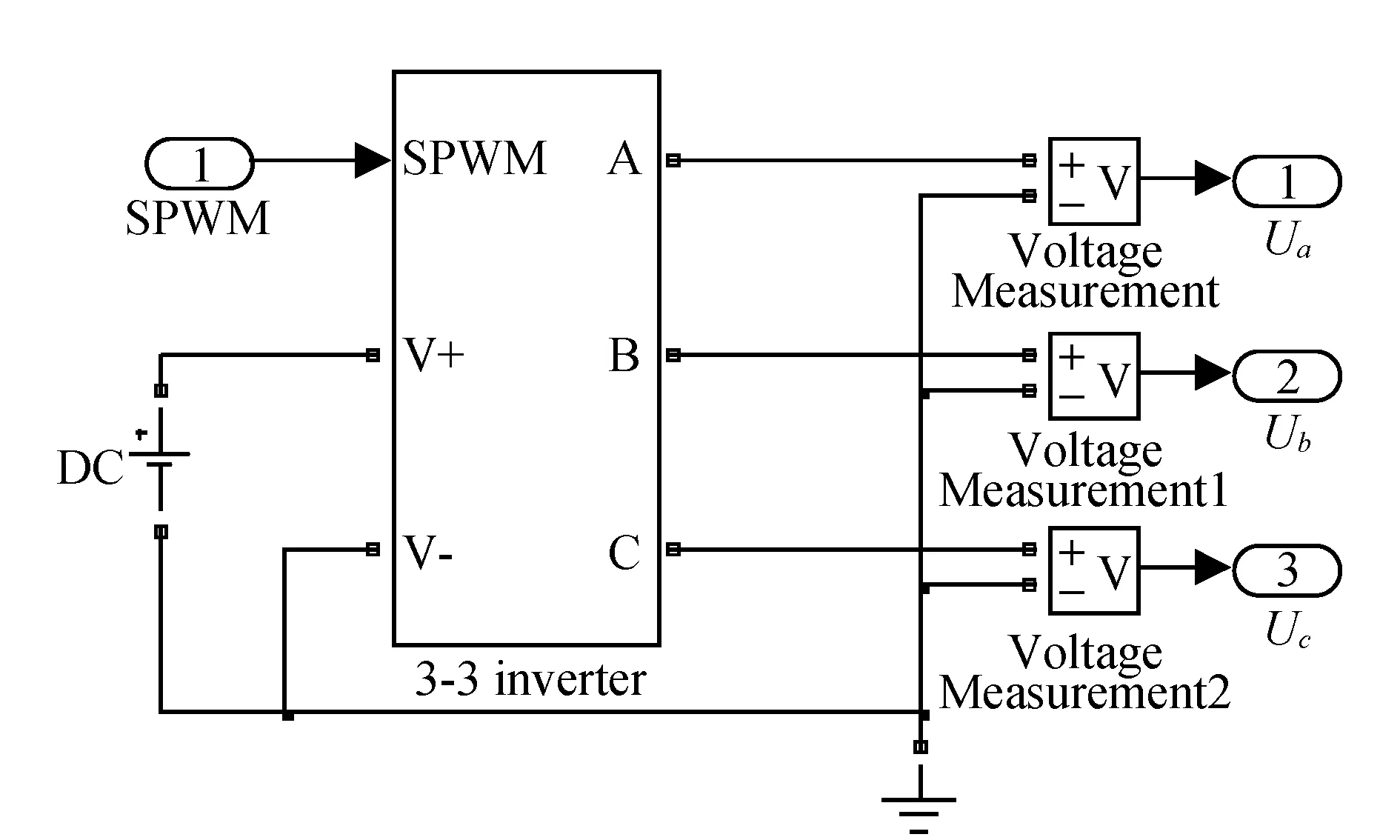
图11 电压逆变器模块
3 仿真结果
仿真BLDC电机参数设置为:极对数p=1、定子相绕组电阻R=1 Ω、定子相绕组自感L=0.02 H、互感M=-0.006 H、额定转速n=1000 r/min、阻尼系数B=0.001 N·m·s/rad、转动惯量J=0.005 kg·m2,PID控制器三个参数Kp=1、Ki=2、Kd=0.04,饱和限幅模块幅值限定为±35,逆变器电源采用220 V直流。
为了对所设计的BLDC控制系统模型的动、静态性能进行验证,依次对系统进行空载起动试验和稳态运行中突加负载TL=10 N·m的仿真试验,得到系统转速、转矩、三相电流和三相反电动势仿真曲线如图12~15所示。
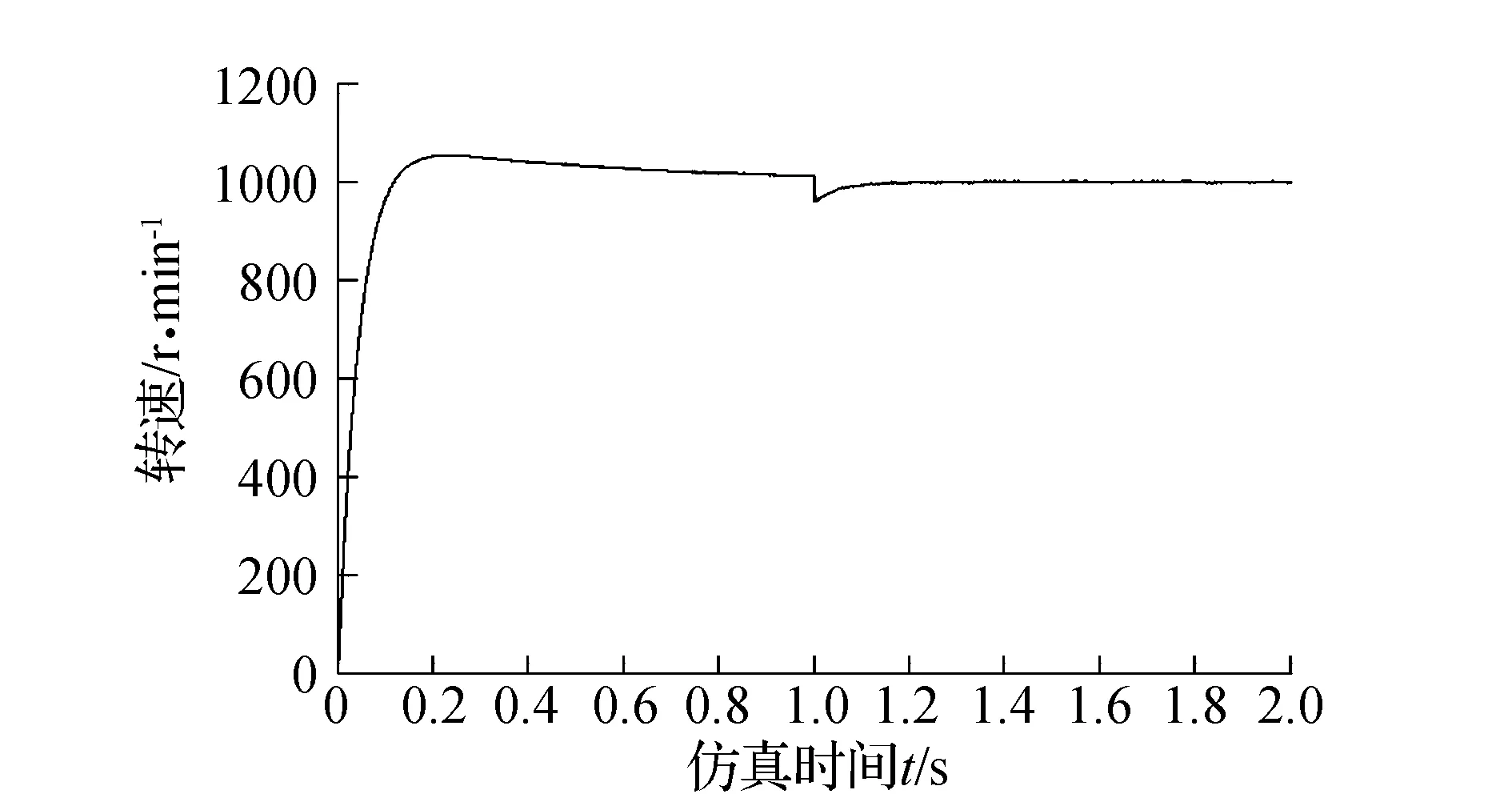
图12 转速响应曲线
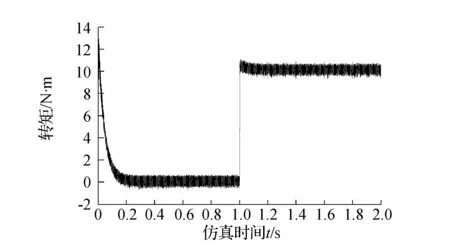
图13 转矩响应曲线
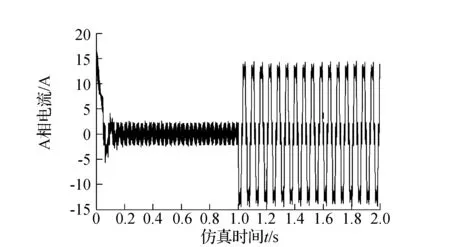
图14 A相电流波形
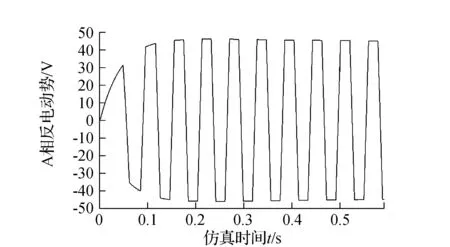
图15 A相反电动势波形
仿真波形表明,在n=1000 r/min的参考转速下,系统快速响应,稳态转速平滑无静差,反电动势为较理想的梯形波;起动阶段,速度控制模块对参考电流起到了很好的限幅作用,获得一段使电流保持为恒值的恒流过程,实现了在允许条件下的最快起动;空载稳速运行时,因为系统的摩擦转矩的存在,电磁转矩均值近似为0;在t=1 s 时突加负载,转速发生跌落,但很快重新恢复到额定转速;负载转矩有较大的脉动,产生的原因主要是换相时存在电流延迟和电流滞环控制器的快速切换。仿真结果证明了这种新型BLDC仿真建模方法在实际应用中的有效性。
4 结束语
通过分析无刷直流电机的数学模型,针对以往建模方法的不足,本文提出了一种新的基于Matlab的BLDC控制系统仿真建模方法。在Simulink环境下,采用转速、电流双闭环的控制策略,构建并测试了这种无刷直流电机控制系统模型。仿真结果表明:该系统能够稳定运行,表现出了较好的静、动态特性,仿真波形与理论分析一致。Simulink环境下进行BLDC控制系统的仿真可以做到对整个系统的一体化仿真,同时,本文采用根据功能分块建模的方法,在下一步的扩展、改进系统及实现、验证其他控制算法时,仅对相应功能模块进行修改或替换即可。因此,它可以成为实际电机控制系统设计与调试中新的思路和工具。
[1]WALTER N A,STEPHEN L H.Electric motor control[M].Australia:Thomson/Delmar Learning,2003:65-70.
[2]沈海燕.基于无刷直流电动机的电动助力转向系统的研究[D].淄博:山东理工大学,2008.
[3]孙建忠,白凤仙.特种电机及其控制[M].北京:中国水利水电出版社,2005:23-25.
[4]朱彩红.无刷直流电机的数学模型及其系统仿真[J].苏州市职业大学学报,2008,19(2):82-84.
[5]程勇.无刷直流电机的MATLAB仿真[J].机电技术,2011(4):60-61.
[6]纪志成,沈艳霞,姜建国.基于MATLAB无刷直流电机仿真系统建模的新方法[J].系统仿真学报,2003,15(12):1745-1749.
[7]吴松华,叶汉民.无刷直流电机控制系统的MATLAB仿真[J].工业控制计算机,2011,24(5):65-66.
[8]曲中水,王建正,朱 泳.基于MATLAB的数字信号基带传输系统仿真[J].森林工程,2004,20(4):31-33.
[9]王寿峰,张孝祖,郑荣良.用于EPS的无刷直流电机控制系统的Simulink建模与仿真[J].拖拉机与农用运输车,2010,37(3):23-26.
[10]殷云华,郑宾,郑浩鑫.一种基于MATLAB的无刷直流电机控制系统建模仿真方法[J].系统仿真学报,2008,20(2):296-297.
A new method for modeling and simulation of BLDC system based on Matlab
LUO Yao-hua,WANG Chao-yi
(College of Automation,Harbin Engineering University,Harbin 150001,China)
Based on the detailed analysis of Brushless DC motor (BLDC) model,a new dual-loop control method for BLDC control system is proposed and designed.In Matlab/Simulink,the isolated functional blocks,such as BLDC block,Speed controller block,Hysteresis current controller block,Inverter block ect,have been modeled.At last,the simulation model of a brushless DC motor control system is established and simulated.The simulation results have verified the correctness and effectiveness of proposed BLDC control strategy.This new scheme is also suitable for verifying the reasonability of other control algorithms and offers a new thinking for designing and debugging the actual motors.
BLDC;modeling;simulation;Matlab
2014-01-15
罗耀华(1956-),男,教授,博士生导师,研究方向:船舶综合全电力推进技术;电力电子技术及应用.
TM33
A
1671-4679(2014)03-0035-06
郝丽英]