机载导弹发射点火信息探测
2014-09-07仲思东
王 涛,仲思东
(1.中国华阴兵器试验中心,陕西 华阴 714200;2.武汉大学电子信息学院,武汉 430079)
机载导弹发射点火信息探测
王 涛1,仲思东2*
(1.中国华阴兵器试验中心,陕西 华阴 714200;2.武汉大学电子信息学院,武汉 430079)
针对机载导弹发射点火信息探测问题,提出了基于视觉图像的探测方法,设计了系统结构和工作流程,介绍了运动目标的捕获和跟踪方法,阐述了导弹点火特征的综合识别方法,构建的探测系统监测距离为10 m~3 000 m,点火探测实时性优于20 ms,在某型空空导弹抗干扰试验期间进行了多次检验,未出现误报、漏报现象。
探测;图像识别;捕获;跟踪
在某型空空导弹抗干扰试验中,需要准确获取导弹发射点火信号以控制靶机抛射诱饵弹,如果诱饵弹抛射时机不准确,将达不到抗干扰试验要求,必须重新试验,造成人力物力的极大浪费。因此,准确无误地获取导弹点火信号变得尤为重要。试验要求导弹点火信号输出的响应时间小于50 ms。在联调期间,由于场区电磁干扰,用于获取导弹点火信号的无线电发射接收系统多次接收到伪点火信号导致误触发,加之试验要求不允许对空中武器系统进行任何改装或附加传感器,因此,如何远距离、非接触、准确获取导弹点火信息成为试验急需解决的一道难题。针对这一问题,本文提出了图像识别的探测方法,构建了探测系统,解决了试验难题。
1 系统原理与组成
本文设计的图像识别探测系统原理如图1所示。
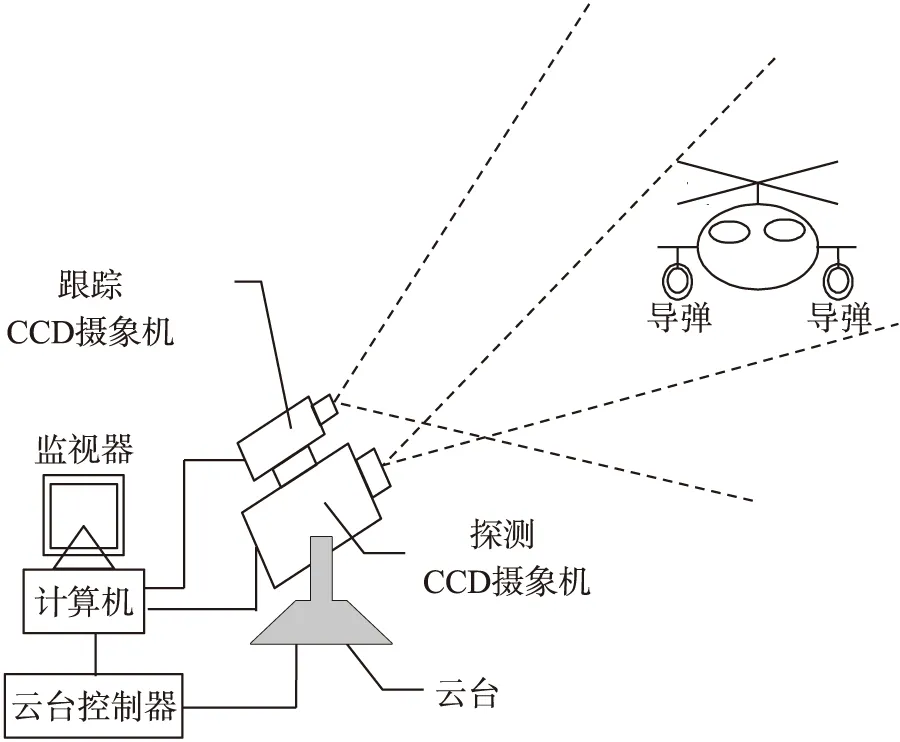
图1 探测系统结构原理图
系统主要由光学成像系统、捕获跟踪CCD摄像机、点火探测CCD摄像机、高速图像采集卡、工控计算机、监视器、云台系统等组成,工作流程如图2所示。
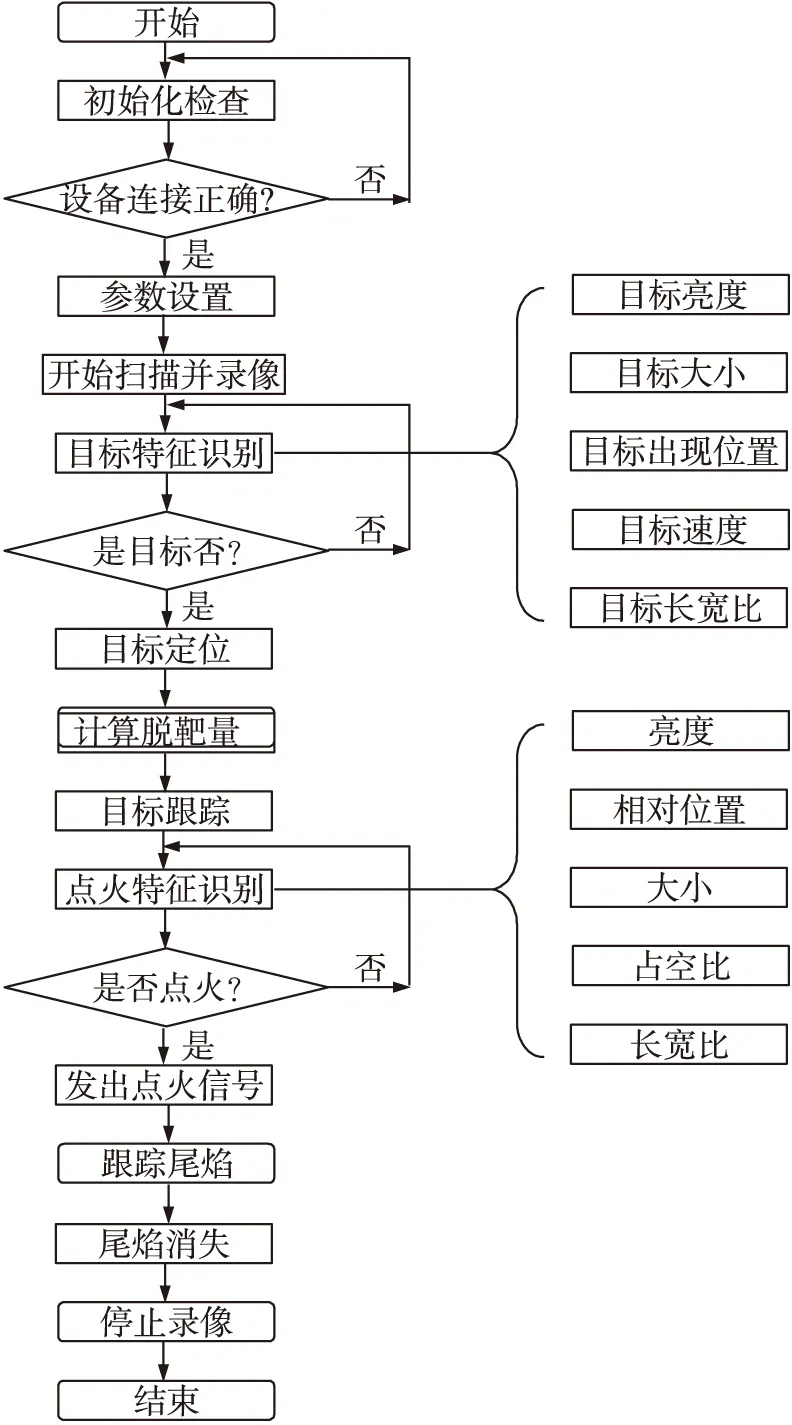
图2 系统工作流程图
探测系统采取等候方式捕获并跟踪飞机,当飞机在预定视场区域出现时,系统根据图像中目标的亮度、大小、出现位置、速度等信息对目标进行识别,并判断是否为目标飞机;当捕获到目标飞机时,立刻对飞机进行图像定位,并计算出飞机的脱靶量(飞机形心偏离图像中心的方向和距离),然后根据脱靶量控制云台向飞机转动,实现对目标的跟踪;跟踪过程中,系统对图像中目标区域进行快速扫描,根据目标灰度、面积、长宽尺寸、占空比等特征信息识别判断导弹是否点火,若导弹点火,计算机串行端口发出触发信号(TTL电平),同时继续跟踪导弹尾焰并录像,直至尾焰消失停止录像,探测结束。
本系统软件采了模块化设计,主要包括以下功能模块:
(1)图像采集模块 主要完成将图像从采集卡中读入到主机内存中。
(2)图像数据处理模块 主要完成图像数据处理工作,实现捕获跟踪和点火识别算法。
(3)云台控制模块 主要完成对云台进行控制,为自动跟踪算法服务。
(4)图像显示模块 主要完成图像的实时显示,利于观察。
(5)文件管理模块 主要完成视频文件、图像文件、图像采集卡参数文件及其他数据文件的保存与读取。
(6)参数设定模块 主要完成系统的初始化及程序运行参数、接口的设定。
2 关键技术
系统涉及的关键技术主要有以下几个方面。
2.1 运动目标的捕获与跟踪
飞机的捕获采用大视场小目标的快速扫描捕获方式,当目标进入视场时,首先通过快速扫描灰度发现目标,然后根据目标的大小、位置、速度等特征对目标进行综合识[1]别,判断目标是否为要捕获的对象,以排除飞鸟、落叶、云彩等伪目标干扰信号。锁定飞机后对飞机进行定位并计算出飞机的脱靶量(偏离图像中心的距离),将脱靶量作为反馈信号控制云台向飞机转动,通过对脱靶量的不断修正实现对飞机的自动跟踪[2]。
从序列图像中定位运动物体[3],并将研究的运动目标从背景中提取出来[4],即运动检测和运动分割是序列图像处理中的一个基本问题[5],目标跟踪结果很大程度上取决于图像分割的质量[6]。针对运动目标的图像特点,提出了主要以灰度作为依据的分割算法。若给定图像f具有灰度级范围是[Zl,Zk],u是Zl和Zk之间的任意一个数,则设置门限u可得到两值图像fu。
设置门限的分割结果通常是带有噪声的,如果门限定得太高,就会使过多的偶然低于门限的目标像元误判为背景,而如果门限定得太低,则会发生相反的情况。所以,要解决的问题就是如何选取一个比较合适的门限u,使之能对由于目标运动而产生的背景变化做出及时调整,以保证使分割运算产生的错误最小。对于背景单一纯净的天空而言,为节省运算时间,灰度门限u的设定可根据下面的公式来设定。
u=gmin-k
(1)
其中,gmin为背景最小灰度值;k为安全值,根据实验经验,一般取20~60。图3为图像灰度阈值分割的效果图,其中背景最小灰度值为239,k取25,灰度门限u为214。

图3 图像灰度阈值分割
单纯的基于灰度的图像识别方法没有保留原图的空间信息,这无疑是不够准确的。因此在基于灰度的图像识别中引入空域信息对于确保识别正确率是十分必要的[7]。在现场试验中发现,为了排除飞鸟、飞虫等干扰[8],经过图像分析比较可以发现,飞机与飞鸟的最大图像区别是连续像素面积(长宽尺寸)和瞬时速度不同,飞机在捕获距离下的像素面积不小于128 pixel×96 pixel,瞬时速度不大于300 pixel/s。目标在第k帧图像拍摄时的瞬时速度的计算如下:
(2)
其中
(3)
(4)
式中xk、xk+1分别为第k帧图像和第k+1帧图像中目标形心的横坐标,yk、yk+1分别为第k帧图像和第k+1帧图像中目标形心的纵坐标,Δt为图像序列中两帧图像之间的拍摄间隔。
在远距离,当目标面积较小,机动性不强时,采用滤波跟踪方法以提高跟踪精度[9]。在近距离,当目标具有一定面积且帧间抖动较大时,采用窗口质心跟踪或匹配跟踪方法以体现跟踪的稳定性和精度。
在实际应用中,最重要的是跟踪速度,跟踪精度要求不高,为了简化算法,节约时间开销,提高系统的实时性[10],可以用目标外接矩形的中心(IC,JC)来近似目标的形心,如图4所示。

图4 脱靶量计算方法
当捕获到目标飞机后,以式(5)计算出外接矩形的中心作为飞机形心,再以式(6)计算出脱靶量(ΔI,ΔJ)反馈到云台即可实现对目标的跟踪。
(5)
其中IR,IL分别为目标最右边和最左边像素横坐标,JB,JT分别为目标最下边和最上边像素纵坐标。
(6)
其中IW,JW分别为图像中心坐标。
由于云台存在运动惯性,跟踪控制过程中会出现回头和抖动现象,可以通过设置脱靶量修正阈值降低跟踪精度来解决上述问题,实现平稳跟踪。
2.2 点火特征的识别
导弹点火特征的识别是探测过程中最重要的一步,关系到探测的成败,单一的图像特征很难排除噪声、杂光等干扰,必须综合多种特征对目标进行识别[11],才能准确判断出导弹是否点火。
2.2.1 灰度特征识别
导弹白天点火瞬间产生一团白烟,夜间点火瞬间产生明亮火光。由此可见,灰度特征是导弹点火的最明显特征,也是最关键特征。当图像灰度值Gi大于设定阈值Gk时,认为导弹点火。阈值Gk由下式确定:
Gk=gmax+k
(7)
其中,gmax为背景最大灰度值;k为安全值,根据实验经验,一般取20~60。
2.2.2 形状特征识别
形状是计算机视觉和模式识别中图像的一个重要特征,它是目标识别的重要手段之一[12]。在计算机视觉和模式识别中,形状是对目标范围的二值图像表示,可以看成是目标的轮廓。形状是刻画物体的基本特征之一,用形状特征区别物体非常直观,利用形状特征进行图像识别可以提高识别的准确率和效率。为了进一步确认点火特征,排除以上变化的干扰,经过实验分析,我们再通过对灰度值大于阈值Gk的连续像素面积、长宽尺寸和占空比等空间特征来判断是否点火。
在现场试验中发现,飞机航灯的闪烁是导弹点火识别中最大的干扰,很容易形成误判,经过图像的对比分析可以发现,航灯与导弹点火的最大图像区别是连续像素面积S不同,航灯的像素面积不超过9 pixel,导弹点火的像素面积不小于25 pixel。因此,设置点火形状特征的最小长宽尺寸为5 pixel×5 pixel。
另外,占空比也是排除其他杂散光干扰的手段之一,其定义如下:
E=S/A
(8)
其中,E为占空比,S为灰度值大于阈值Gk的连续像素面积,A为包围目标的最小矩形窗口像素面积。导弹点火时产生的白烟或火光为团状实心图形,占空比大于70%。
点火特征识别是空中武器运动状态下发射点火探测中最关键的一点,也是最难的一点。太阳、航灯、机窗玻璃反射光及其他杂光等干扰信号很容易被误认为是导弹发射点火,从而形成误判,因此,单一的识别模式很难排除干扰。为了解决这一难题,采用多模式综合识别技术,通过点火瞬间目标的灰度、象素面积、长宽尺寸、占空比等图像特征的与运算,从而取得目标的唯一性,排除干扰信号,准确识别目标。经过对数字图像的处理、解算和判别,探测到点火信息时,由计算机串行通信口输出触发信号给靶机遥控台,探测完成。

图5 空空导弹点火前一帧图像
3 实验及结果
为达到导弹点火信号输出响应时间小于50 ms的要求,系统采用最大帧频100 frame/s的相机进行图像采集,并对图像处理代码进行了优化,经测试,单帧图像运算处理时间小于10 ms,系统两通道图像采集帧速均设置为60 frame/s时,系统运行正常,整机探测实时性优于20 ms,在某型空空导弹发射抗干扰试验期间进行大量实验,本系统最短成像距离为10 m,视距超过3 000 m时导弹点火瞬间尾焰成像面积过小难以准确判断,在监测距离为10 m~3 000 m范围内,经过多次检验,未出现误报、漏报现象,探测正确率达99%以上,结果令人满意。
本系统自动实时探测武器发射点火,在点火时刻向COM1端口发送TTL电平,同时在界面右下角报警显示并发出报警提示音,部分人机界面如图5、图6所示。
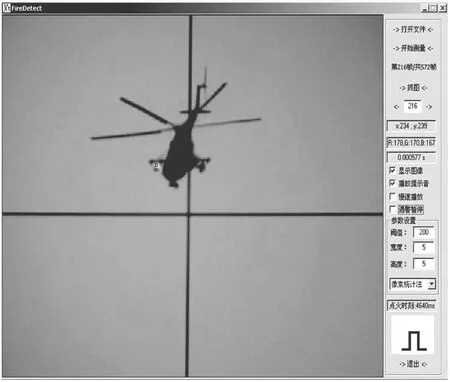
图6 空空导弹点火帧图像
4 结束语
本探测方法突破了以往在武器系统上加装传感器或进行试验改装的手段,综合运用成像技术、目标捕获跟踪技术、特征识别技术、计算机接口通信技术等形成的智能探测方法,抗电磁干扰,适用于昼夜全天候探测,不但解决了空空导弹点火时刻的实时探测问题,还可用于其他导弹、火炮、火箭等发射点火探测以及弹丸出膛速度、无人机起飞速度、炸时等信息的测量获取。对于复杂背景的弱小运动目标跟踪识别正确率会下降。
[1] 夏瑜,吴小俊,王洪元. 基于局部特征组合的目标跟踪算法[J]. 光电工程,2012,39(7):67-73.
[2]王宏波,庄志洪,郑华利,等. 红外成像型空空导弹目标识别与跟踪算法研究[J]. 探测与控制学报,2003,25(4):1-6.
[3]史志富,雷金利,寒梅. 机载光电传感器图像融合识别的D-S证据理论方法[J]. 传感技术学报,2009,22(7):973-977.
[4]高国旺,刘上乾,秦翰林,等. 复杂背景下的红外目标自动跟踪算法[J]. 光电工程,2010,37(6):78-83.
[5]李喜来,李艾华,白向峰,等. 增量式特征基背景模型目标运动检测[J]. 传感技术学报,2010,23(9):1293-1296.
[6]张根耀. 基于动态图像分析的巡航导弹跟踪软件与算法研究[D]. 西北大学,2003,83-94.
[7]黄宗福,韩建涛,陈增平. 天文光电图像序列目标成像特征提取与分析[J]. 光电工程,2011,38(4):59-64.
[8]张学武,徐立中,石爱业,等. 基于视觉仿生机理的成像目标检测和识别方法及感知计算[J]. 传感技术学报,2010,23(12):1736-1742.
[9]马东辉,朱斌,樊祥,等. 基于粒子滤波的目标图像多特征融合跟踪方法[J]. 探测与控制学报,2009,31(4):39-43.
[10]刘松涛,沈同圣,周晓东,等. 舰船红外成像目标实时识别与跟踪系统研究[J]. 系统工程与电子技术,2005,27(8):1406-1408.
[11]王正国,罗来邦,董卫斌,等. 基于多分类器组合的红外目标识别方法[J]. 探测与控制学报,2012,34(2):61-65.
[12]孙俭. 图像目标识别之实现[J]. 舰船电子工程,2005,25(4):113-115.

王涛(1974-),男,陕西户县人,中国华阴兵器试验中心高级工程师,主要从事图像测量研究,wangtaos@126.com;

仲思东(1963-),男,黑龙江哈尔滨人,武汉大学电子信息学院教授,博士生导师,主要从事机器视觉与图像测量研究,zhongsidong@x263.net。
DetectiononFiringofAerialMissile
WANGTao1,ZHONGSidong2*
(1.Huayin Ordnance Test Center,Huayin Shanxi 714200,China;2.Department of Optoelectronic Information Engineering,Wuhan University,Wuhan 430079,China)
According to the problem of aerial missile’s firing detection,the detecting way based on visual image is put forward. The system structure and workflow are designed. The moving target capturing and tracking are introduced. The ignition multiple characteristics finding are expounded. The system’s monitor range is 10 m~3 000 m. The detecting real time is less than 20 ms,The system capabilities are verified many times during the anti-interference test for aerial missiles. The results indicate that error reporting and missing reporting are not happened.
detect;image identify;capture;track
2014-04-18修改日期:2014-08-21
10.3969/j.issn.1004-1699.2014.10.014
TP212.9;TP216;TP391.41
:A
:1004-1699(2014)10-1377-05