旋转变压器数据融合与误差补偿的FPGA实现
2014-09-06,,,
,, ,
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001)
旋转变压器数据融合与误差补偿的FPGA实现
郭闯强,倪风雷,陈泓,张飞
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001)
为提高双通道多极旋转变压器测角系统的精度,提出了基于查表原理的粗、精通道测角数据融合方法。该方法降低了数据融合技术对粗通道旋转变压器原始测角精度的要求,并针对融合后测角误差曲线建立了基于三角函数拟合的误差补偿函数,在FPGA中实现了数据融合和误差补偿的快速计算,且搭建了双通道多极旋转变压器标定实验平台。
旋转变压器;数据融合;误差补偿;FPGA
0 引言
随着系统控制精度和性能的提高,对角度传感器精度的要求也越来越高。双通道多极旋转变压器作为高精度角度测量器件,在惯性导航与制导、武器火力控制、大中型数控系统和机器人控制等领域得到广泛应用。由于旋转变压器测角系统的精度受旋变自身加工精度、安装精度和旋变-数字转换电路(RDC)精度等因素限制,需要通过标定和软件补偿的方式进一步提高系统的测角精度[1]。
双通道多极旋转变压器测角信息的软件处理主要包括粗、精通道数据融合和误差补偿。对于数据融合,主要有固定区间法[2]和滑动区间法[3]。精通道旋转变压器的极数越多,对粗通道测角精度的要求就越高,生产成本就越高,因此,需要对现有的方法进行改进,降低数据融合的条件限制。对于误差补偿,主要有查表补偿和函数拟合补偿法[4-5]。
针对上述现有数据融合和误差补偿方法存在的不足,提出了一种基于查表原理的数据融合方法,与现有方法相比,降低了对粗通道旋转变压器原始测角精度的要求;并采用FPGA实现了数据融合和基于函数误差补偿的快速计算,满足了实时性要求。另外,建立了双通道旋转变压器标定平台,并对所提出的方法进行了实验验证。
1 双通道旋转变压器工作原理
双通道旋转变压器由粗、精2个通道组成,工作原理如图1所示。粗通道激励绕组Z1~Z2和精通道激励绕组Z3~Z4并联,共用一个激励源。D1~D2和D3~D4分别为粗通道相互正交的2套输出绕组;D5~D6和D7~D8分别为精通道相互正交的2套输出绕组。
当转子在不同的角度时,定子所切割的磁场强度不同,故在定子输出绕组上感应出与转子位置成正余弦关系的电压。设激磁电压为:
U12=U34=KUmsin(ωt)
(1)
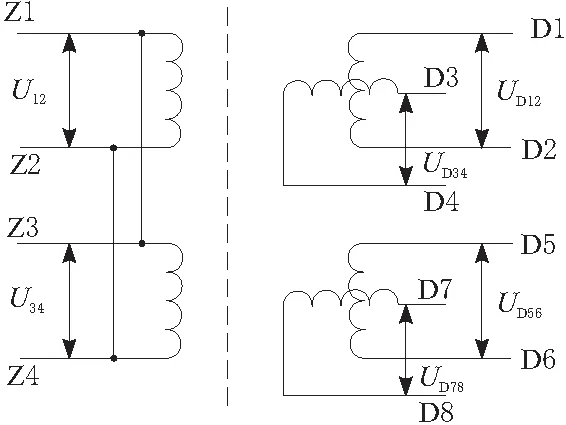
图1 双通道旋转变压器工作原理
则在粗通道和精通道输出绕组上的感应电压分别为:
UD12=KUmsin(ωt)sinΦ
(2)
UD34=KUmsin(ωt)cosΦ
(3)
UD56=KUmsin(ωt)sin(pθ)
(4)
UD78=KUmsin(ωt)cos(pθ)
(5)
p为精通道旋转变压器的极数;K为旋转变压器定子与转子绕组间的比例系数,与匝数比有关;Φ为余弦绕组轴线D3~D4与定子激磁绕组轴线Z1~Z2之间的粗测角度值;θ为余弦绕组轴线D7~D8与定子激磁绕组轴线Z3~Z4之间的精测角度值;UD12,UD36以360°(机械角度)为1个周期,而UD56,UD78则以360°/p(机械角度)为1个周期,若p=8,则精通道以44.25°(机械角度)1个周期。数据曲线如图2所示,其中,粗实线为粗通道数据,虚线为精通道数据。

图2 双通道旋转变压器数据曲线
2 双通道旋转变压器数据融合
2.1 基于查表原理数据融合方法
a.将旋转变压器转子运转1周,同时记录粗通道和精通道的角度反馈数据,如图2所示,其中,粗实线为粗通道数据θc,虚线为精通道数据θj。
b.找出精通道数据从360°向0°跳变时所对应的粗通道位置thete_0~thete_7。
c.建立如图3所示的数据融合区域划分表,数字0~7为名义区间标号i*。由于RDC一般为二阶系统,运行过程中测角数据存在动态误差,将thete_i±Δθ的阴影区间定义为动态判别区,空白区域定义为静态判别区。Δθ>n(ec+ej),其中,ec为粗通道动态跟踪误差,ej为精通道动态跟踪误差,n≥1为放大系数,根据标定误差数据离线计算确定。

图3 数据融合原理
d.如果θc落在第i*个静态判别区,区间标号为i=i*;如果θc落在第i个动态判别区,则判断θj的位置,如果θj>180°,则i=i*,否则i=i*+1。
e.根据区间标号i计算双通道旋转变压器融合后反馈角度φ,计算公式为:
φ=i*360/p+θj/p
(6)
2.2 基于查表原理数据融合方法的容差分析
通过以上数据融合方法的说明可知,如果2个相邻的动态判别区不重叠,通过查表法就能够正确判断出区间标号,而对粗通道的测角精度没有严格要求。高精度RDC芯片的动态转换误差一般小于±4 LSB,可根据系统实际情况选取Δθ的取值。因此,该方法能够降低数据融合对粗通道测角精度的要求,应用范围更广。
2.3 数据融合方法的FPGA实现
为了正确、快速融合粗、精通道旋转变压器数据,采用寄存器、比较器和3个功能模块构建了基于查表原理的数据融合FPGA功能单元。该功能单元以θc和θj为输入,以融合后的角度φ为输出,结构如图4所示。其中,最上排8个比较器用来判断θj所在名义区间标号i*;Fun1根据i*,通过数据表获得thete_i*和thete_(i*+1)的角度值,并输出动态区间边界值thete_i*+Δθ和thete_(i*+1)-Δθ;Fun2根据a0~a2的逻辑关系判断出θj区间标号i;Fun3根据式(6)计算融合反馈角度φ。图4中,Clk为系统时钟信号;Res为系统复位信号;En1~En4为时序控制信号,来自时序控制有限状态机。
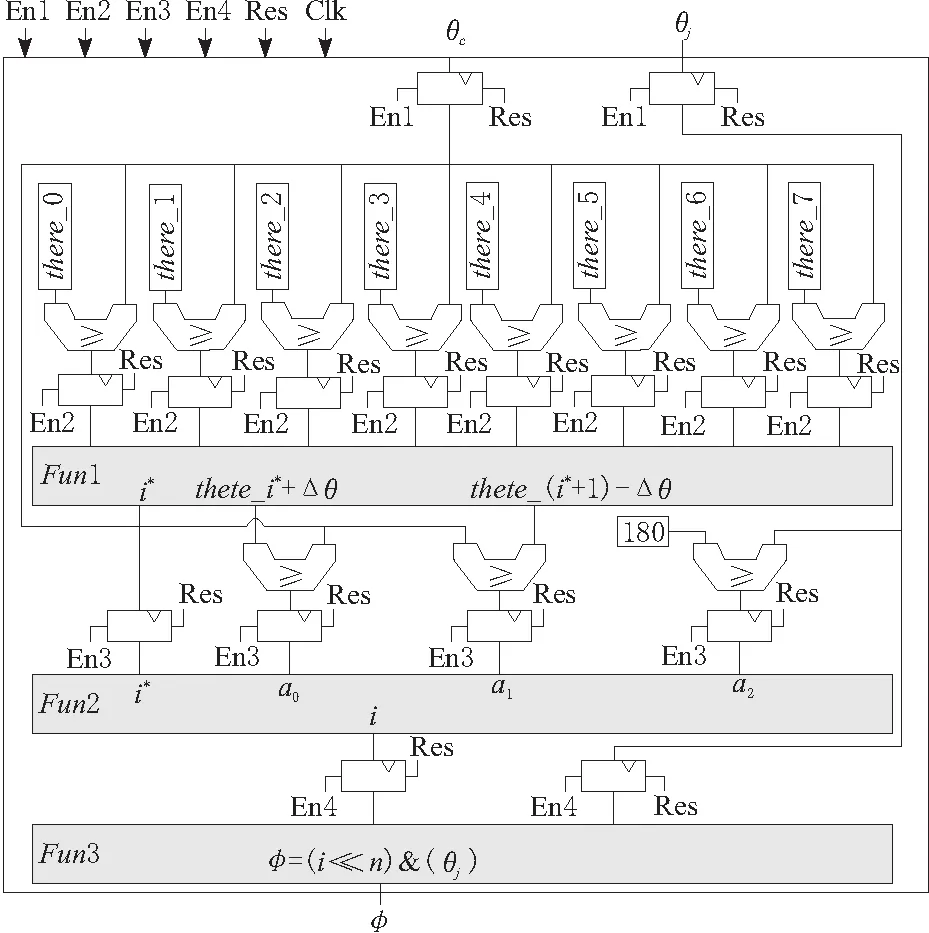
图4 数据融合模块结构
3 双通道旋转变压器测角误差模型
为了采用拟合函数对双通道旋转变压器数据融合后的测角误差进行补偿,需要对误差产生原理进行分析。旋转变压器误差按照来源,分为原理性误差、工艺性误差和条件性误差,这些误差可以归纳为幅值误差、正交误差、函数误差、励磁电源波形失真所引起的误差、相移误差和跟踪误差等,详细误差模型说明见参考文献[6]。从这些误差模型可以看出,旋转变压器的误差曲线与转子角度成一定三角函数关系。
通过对标定出的旋转变压器误差曲线进行快速傅里叶分析,发现误差曲线能量主要集中在1次、2次、p次、2p次谐波处[4]。因此,建立包括常值误差和关于旋变反馈角度的三角函数误差模型为:
e(φ)=c0+c1sinφ+c2cosφ+c3sin(2φ)+
c4cos(2φ)+c5sin(pφ)+c6cos(pφ)+
c7sin(2pφ)+c8cos(2pφ)
(7)
根据已知误差曲线数据离线计算出c0~c8等9个系数,并存储到程序存储器中,控制器就能够根据融合后的反馈角度φ,通过式(7)计算出对应的测角误差,进而完成补偿工作。
4 函数误差补偿算法的FPGA实现
对于FPGA控制器来说,在获得误差补偿函数的优化系数后,需要解决的主要问题是三角函数和误差函数值的实时计算。电机伺服控制电流环的控制周期一般小于50 μs,因此,误差补偿计算要求在小于5 μs的时间内完成。为此,采用VHDL语言在FPGA上用硬件实现了三角函数值和误差函数值的快速计算,满足了实时性要求。
4.1 基于CORDIC算法的三角函数计算
为了在FPGA中快速计算正余弦函数值,一般采用CORDIC算法。该算法通过一系列固定的、与运算基数相关的角度不断地偏摆,来逼近所需要的旋转角度,从而使得矢量的旋转和定向运算,不需要三角函数表及乘、开方、反三角函数等复杂运算[7]。每个CORDIC处理器能够同时计算出角度的正弦和余弦值。对于式(7),采用4个CORDIC处理器就能够同时计算出8个三角函数值,且计算精度高,速度快。
4.2 误差补偿函数的硬件实现
采用CORDIC处理器、寄存器、加法器和乘法器等基本的可重复利用模块,针对式(7)构建了旋转变压器误差补偿模块,结构如图5所示。该模块以融合后的原始反馈角度φ为输入,补偿后的测角数据为输出。图5中,COR代表CORDIC处理器。

图5 误差补偿模块结构
4.3 双通道旋转变压器数据处理模块
将上述设计的双通道旋转变压器数据融合功能模块和误差补偿功能模块,与时序控制有限状态机相结合,构建了双通道旋转变压器数据处理模块,如图6所示。有限状态机提供数据处理的时间顺序,控制2个功能模块的工作时序,将输入的粗通道和精通道的反馈数据融合成高分辨率测角反馈数据,进而完成基于函数模型的误差补偿,从而提高了测角精度。

图6 双通道旋转变压器数据处理模块结构
5 实验
5.1 双通道旋转变压器标定系统
为了验证所提出的数据融合和误差补偿方法,建立了双通道旋转变压器标定系统。系统主要由标定台、编码器、电源、通信接口卡、信号转换板、精通道转子、精通道定子、粗通道转子和粗通道定子等部分组成。实验中双通道旋转变压器的速比为64∶1,旋转变压器的定子与标定台壳体固定,旋转变压器的转子与标定台转子固定。转子同时与光电编码器相连接,编码器型号为775-HV,设计为25 000线,为旋转变压器的标定提供参考基准。信号采集板以Altera公司FPGA为核心控制芯片,能够同时采集3路旋转变压器信号和1路光电编码器信号。信号采集板通过高速串行通讯接口卡与PC机相连,向PC机反馈采集数据,通信频率为5 kHz。
5.2 双通道旋转变压器数据融合及原始误差
将标定台的转子转动1周,通过对比粗通道旋转变压器和光电编码器的测角数据,获得粗通道测角误差曲线如图7所示。由图7可以看出,粗通道的测角绝对误差达5.3°,接近精通道电气周期所对应的机械角度(360/64=5.63°),不满足现有文献所说明的数据融合方法的要求。而通过本文所提出的方法进行数据融合后,获得双通道旋转变压器测角误差曲线如图8所示。由图8可以看出,该方法降低了数据融合对粗通道测角精度的要求,在粗通道绝对误差高达5.3°的情况下实现了数据的正确融合。融合后双通道旋转变压器测角系统的绝对误差为0.388 6°。

图7 粗通道旋转变压器误差曲线

图8 双通道旋转变压器原始误差曲线
5.3 基于查表法的误差补偿
为了对比说明所提出基于FPGA的测角误差补偿效果,首先采用查表法对上述测角误差进行补偿。测试中精通道旋转变压器为64极,粗、精融合后反馈角度的分辨率为22 bit。限于PROM的存储空间,建立了包含8 192个数据点的误差曲线表,2个数据点之间的补偿值通过线性插补计算获得。经过查表补偿,测得误差曲线如图9所示,绝对误差为0.077°。
5.4 基于函数拟合法的误差补偿
采用所构建的基于三角函数的误差补偿模块对图8所示误差曲线进行补偿后,测得误差曲线如图10所示。采用三角函数补偿后绝对误差为0.061 1°,相对于查表法提高了误差补偿精度,且占用较少的资源。
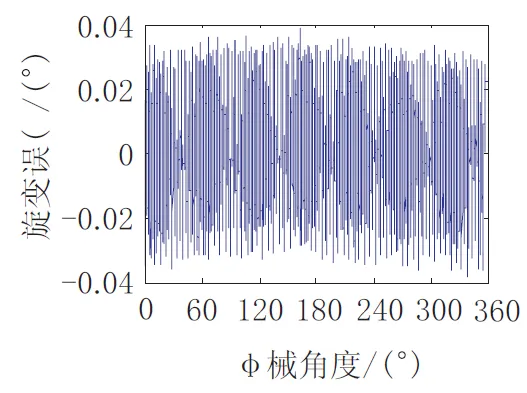
图9 采用查表法补偿后误差曲线

图10 采用三角函数法补偿后误差曲线
6 结束语
提出了基于查表原理的双通道旋转变压器数据融合方法,能够在粗通道测角误差接近于360°/p(精通道电气周期对应的机械角度)情况下,实现数据的正确融合,与现有方法相比,降低了数据融合对粗通道原始测角精度的要求。该方法适合在精通道极数较多、粗通道精度不高的情况下使用。并利用VHDL语言在FPGA中完成了双通道旋转变压器数据融合和误差补偿计算,满足了系统实时计算要求,且占用资源少。从而解决了现有误差补偿方法存在的占用资源多或计算延时大的问题。
建立了双通道旋转变压器标定平台,实验结果表明,所提出的方法能够在不增加硬件成本的前提下,实现旋转变压器测角误差的快速准确补偿,从而大幅度提高系统测角精度。并且该方法具有通用性,易于扩展应用。
[1] 张京娟,张仲毅,刘俊成.一种新型的旋转变压器测角误差标定技术[J].仪器仪表学报,2010,31(1):149-153.
[2] 徐大林,高文政.基于FPGA的多极旋转变压器粗、精数据组合双速处理器的设计与实现[J].测控技术,2006,25(5):42-45.
[3] 谢显之,刘新跃,于永昌.轴角编码粗精组合纠错算法的研究与应用[J].计量与测试技术,2001(3):6-8.
[4] 肖跃华,葛永强,张渝怀.双通道多极旋转变压器误差补偿[J].中国惯性技术学报,2007,15(5):573-575.
[5] Hung S T, Hung J C.Digitally compensated resolvers[C]∥Proceedings: IECON’84.Tokyo Japan,1984:625-627.
[6] 徐殿国,王宗培,王雅云.旋转变压器轴角数字转换系统的误差分析[J].仪器仪表学报,1993,14(3):231-237.
[7] 吴 恒,王淦泉,陈桂林.CORDIC算法在基于FPGA的PMSM控制器中的应用[J].电机与控制学报,2009,13(增刊1):113-118.
Realization of Data Fusion and Error Compensation for Resolvers in FPGA
GUOChuangqiang,NIFenglei,CHENHong,ZHANGFei
(State Key Laboratory of Robotics and System,Harbin Institute of Technology, Harbin 150001, China)
To improve the angular accuracy of dual-channel multipolar resolvers, a new data fusion method, which requires lower angle-measuring precision of the coarse-channel resolver, has been presented to combine the angle data from both fine and coarse channels based on the table look-up technique. According to the resulting error curve of angle measurement using data fusion, an error compensation function adopting the trigonometric fitting has been designed. Both the data fusion and error compensation are completed in a FPGA.
resolver; data fusion; error compensation; FPGA
2014-01-06
中央高校基本科研业务费专项资金资助项目(HIT.NSRIF.2015059);新世纪优秀人才支持计划资助项目(NCET-10-0058)
TM383.2
A
1001-2257(2014)07-0003-04
郭闯强(1982-),男,河北永年人,助理研究员,研究方向为永磁同步电机驱动和机器人控制技术;倪风雷(1975-),男,黑龙江七台河人,副教授,研究方向为永磁同步电机驱动和机器人控制技术。
