六足机器人爬楼梯步态规划
2014-09-06,,
,,
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
六足机器人爬楼梯步态规划
孔子文,张世武,许旻
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
楼梯是移动机器人工作环境中最常见的复杂障碍物之一,也是衡量机器人在非结构化环境中推进性能的一项重要指标。因此,分析了国内爬楼梯机器人的研究现状,设计了六足机器人AmphiHex的四足步态,计算了四足步态的稳定裕度,并分析了四足步态在不同楼梯中的应用,最后通过实验验证步态规划是可行的,从而为机器人的系统设计和行为决策提供指导。
六足机器人;步态规划;稳定裕度
0 引言
移动机器人以其对复杂环境的适应能力,越来越多的被用于工业应用、海洋开发、家庭服务、太空探索和现代战争等场合。楼梯是最常见的障碍物之一,爬楼梯能力是移动机器人应具有的基本功能。国内外现有的爬楼梯机器人按推进方式主要分为轮式、腿式、履带式和轮腿式等[1-3]。
1 步态规划
1.1 机器人结构
六足机器人AmphiHex采用半圆腿为推进机构,具有良好的环境适应性,能够适应平地、楼梯和泥地等不同环境[4]。机器人由驱动模块、变形腿模块、控制电路和防水壳体组成,左侧3条腿依次编号为1,2,3,右侧3条腿依次编号为4,5,6。机器人的主要结构参数如表1所示。AmphiHex采用弧形腿为推进机构,每条腿仅有1个自由度,降低了控制的复杂度。机器人在楼梯上运动如图1所示。
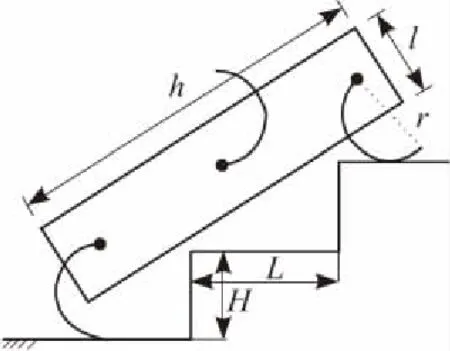
图1 AmphiHex楼梯运动
表1 六足机器人AmphiHex主要结构参数
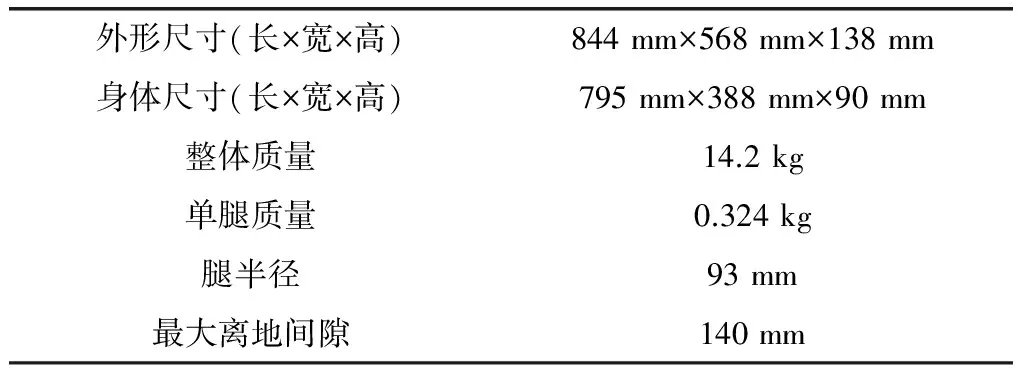
外形尺寸(长×宽×高)844mm×568mm×138mm身体尺寸(长×宽×高)795mm×388mm×90mm整体质量14.2kg单腿质量0.324kg腿半径93mm最大离地间隙140mm
1.2 六足机器人的典型步态
六足机器人在陆地上运动时,按照支撑在地面上的腿的数量不同,可将步态分为三角步态、四足步态和波动步态[5]。这3种步态是六足机器人陆地运动最常用的步态,其中三角步态速度快,灵活性高;波动步态速度慢,但稳定性好;四足步态介于以上两者之间。
六足机器人在运动时,腿的运动状态可以分为支撑相和摆动相。支持相是机器人的腿处于支撑或者着地的状态,此时腿承受载荷并朝运动反方向转动;摆动相则是指机器人的腿处于空中转动的不着地状态。用T表示机器人腿的运动周期,并且用tsi表示机器人的第i条腿处于支撑相的时间,则占空比βi可以用支撑相的时间tsi与运动周期T的比值来表示,即
βi=tsi/T
(1)
占地系数δ是指机器人运动过程中处于支撑相的腿的平均个数,对于腿的总条数为n的机器人为:
(2)

(3)
对于不同的步态,占地系数δ影响机器人的稳定性和平均速度。较小的占地系数意味着机器人处于支撑相的腿较少,速度较快;相反,占地系数较大时,处于支撑相的腿的条数增加,能承受更大的载荷,但是速度较慢。
1.3 AmphiHex步态参数
六足机器人AmphiHex运动时,6条腿按照一定的时序整周转动。图2为机器人运动时,单腿的运动示意图,其中,P0是由机器人身体内部的零位检测装置决定的绝对零度位置;P1和P2分别是支撑相的开始和结束位置。用参数ωs,ωf,ts,tf,θ0和θ1来描述机器人的运动。θ0是腿从OP0位置到OP1位置转过的角度,θ1是支撑相的角度,ts和tf分别是支撑相和摆动相的时间。
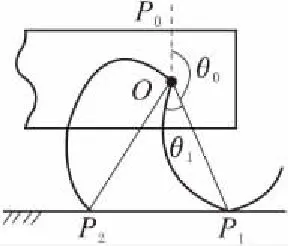
图2 AmphiHex单腿运动
在AmphiHex半圆腿的一个运动周期中,支撑相的角度为 [θ0,θ0+θ1],其余角度为摆动相。在支撑相,腿以较慢的角速度ωs转动,以支撑机器人并提供推进力;在摆动相,腿以较快的角速度ωf转动。由于半圆腿在转动的过程中,旋转中心离地面的距离是变化的,所以当支撑相结束时,处于摆动相的腿也应该结束摆动相,因此,半圆腿的运动应满足:
(4)
2 AmphiHex四足步态
2.1 四足步态的步态规划
六足机器人四足步态的灵感来自于蟑螂的运动,蟑螂在攀爬运动时会增加支撑腿的条数来维持身体的稳定,由常规的三足支撑运动变为四足支撑运动。采用四足步态,六组昆虫或六足机器人可以获得较大的推进力和稳定性[6]。
在四足步态中,AmphiHex的6条腿被分为3组,每一组腿由左侧和右侧的2条腿组成。3组腿分别为前足(1号腿和4号腿),中足(2号腿和5号腿)和后足(3号腿和6号腿)。机器人的3组腿按照由前到后的顺序依次转动。在四足步态中,任意时刻至少有4条腿处于支撑相,占空比为2/3,占地系数为4。机器人四足步态运动的时序如图3所示。
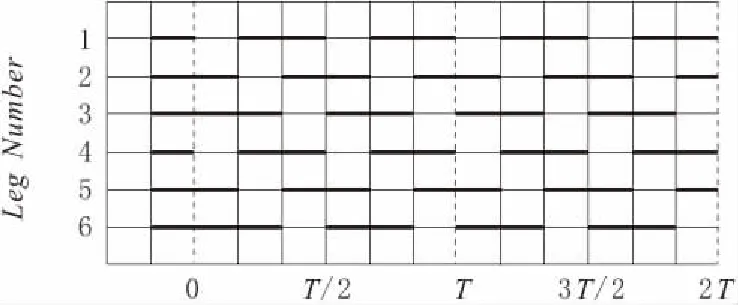
图3 AmphiHex四足步态时序
图4为AmphiHex四足步态的运动过程,可以分为以下3步:
a.前足从P2转到P1,处于摆动相,中足停留在P1,后足从P1转到P2,处于支撑相,如图4a所示。
b.前足停留在P1,中足从P2转到P1,处于支撑相,后足从P1转到P2,处于摆动相,如图4b所示。
c.前足从P1转到P2,处于支撑相,中足从P2转到P1,处于摆动相,后足停留在P1,如图4c所示。
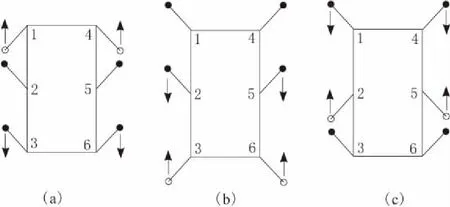
图4 AmphiHex四足步态运动过程
按照上述步骤循环,AmphiHex以四足步态向前推进。
与三角步态相比,四足步态的速度稍慢,任意时刻只有2条腿处于摆动相,但四足步态的承载能力和稳定性较好。三角步态常用于在平地上行走,可以获得更大的前进速度和运动灵活性。四足步态则用于斜坡或者楼梯等机器人容易发生倾斜或翻到的场合,以获得稳定的运动。
2.2 机器人四足步态的稳定裕度分析
McGhee和Iswandhi于1976年提出静态稳定裕度SSM(static stability margin)的概念[7]。SSM稳定裕度定义为重心投影点距离投影支撑多边形各边的最小距离,其数学表达式为:
(5)
SSSM为静态稳定裕度;ln为支撑腿数,diG为重心投影至支撑多边形第i条边的距离。当SSSM>0时,机器人处于稳定状态;反之,则是不稳定的。
六足机器人以四足步态运动时,当2条前腿或2条后腿处于摆动相时,机器人的稳定性最差。以前足离地的状态为例,机器人处于稳定状态需满足以下条件:中足和后足处于支撑相,且中足的支撑点不能越过身体的中心线。机器人在该状态下的稳定裕度计算如5所示。图5中,O为机器人身体重心的投影;s1,s2,s3,s4分别为机器人重心投影到支撑多边形各边的距离。
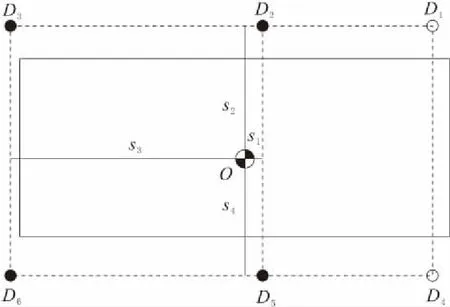
图5 AmphiHex四足步态稳定裕度
根据静态稳定裕度SSSM=min(s1,s2,s3,s4),由图6可得:
(6)
lr=d·sinφr
(7)
ψr=θr-90°
(8)
此时的最小稳定裕度为:
(9)
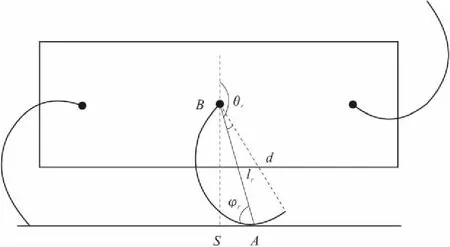
图6 AmphiHex最小稳定裕度
由上式可得,SSSM>0,因此,机器人的四足步态是稳定的。
3 AmphiHex爬楼梯实验及分析
3.1 四足步态在爬楼梯中的应用
与翻越单个或者几个障碍物相比,爬楼梯要求机器人能够更好地适应环境,以避免由于楼梯台阶长度限制而导致机器人运动若干周期后身体的姿态无法和适应楼梯,导致爬楼梯失败。
对于不同尺寸的楼梯,机器人在楼梯上行走时,可能出现腿无法接触到下一级楼梯的情况,发生踩空,进而导致后续的步态无法与楼梯相适应,导致爬楼梯失败。
在步态设计中,支撑相的角度可以在一定范围内变化。对于不同长度和高度的楼梯,可以通过改变支撑相的角度,使机器人的运动与楼梯协调。楼梯较长时,通过增加支撑相的角度,使得机器人身体的前端能够接触楼梯,继续完成爬楼梯运动。相反,当楼梯较短时,减小支撑相的角度能确保机器人腿的着地点和楼梯保持协调。
3.2 机器人爬楼梯实验设计
选取了校园5种不同类型参数的楼梯来测试六足机器人AmphiHex的爬楼梯性能,实验所选楼梯的尺寸及实验结果如表2所示。
表2 实验所选楼梯尺寸和实验结果

楼梯编号高度H/m宽度L/m角度/(°)速度(台阶数/s)成功率/%10.120.28522.80.310020.140.29525.40.2610030.150.326.60.2110040.160.2829.70.186050.190.332.300
其中,楼梯的角度为楼梯的高和长的比值的反正切值,机器人爬楼梯的速度为平均每秒钟爬上的楼梯的台阶数。实验中,机器人成功爬上了4种楼梯,机器人能够爬上的楼梯的最大角度为32.3°,机器人在爬22.8°的楼梯时速度最快,为0.3台阶/s。
3.3 实验结果分析
通过对比试验中不同楼梯的尺寸,发机器人能否爬上楼梯主要取决于楼梯台阶的高度,与台阶的长度,倾斜角度和表面情况无关。楼梯台阶过高,机器人的腿处于摆动相时,力臂较长,所需转矩较大,机器人因驱动能力不足而无法爬上楼梯;相反,台阶高度较低时,力臂相对较短,所需转矩较小,则能够成功爬上台阶。
4 结束语
设计了六足机器人AmphiHex的四足步态,对四足步态的稳定性进行了分析,并开展了机器人四足步态爬楼梯的实验研究。实验表明,机器人能用四足步态在常见尺寸的楼梯上行走,步态规划方案是可靠的。后续的研究重点是机器人对不同尺寸楼梯的识别,并自动调整步态参数来适应楼梯。
[1] 马学玉. 可爬楼梯的移动机器人研究[J].机电信息, 2010(12): 87-88.
[2] 朱坚民,李付才, 李海伟,等. 轮腿式爬楼梯移动机器人的设计及运动特性分析[J].中国机械工程, 2013, 24(20): 2722-2730.
[3] Haynes G C, Rizzi A A, Koditschek D E. Multistable phase regulation for robust steady and transitional legged gaits[J].The International Journal of Robotics Research, 2012, 31(14): 1712-1738.
[4] Zhang S, Liang X, Xu L, et al. Initial development of a novel amphibious robot with transformable fin-leg composite propulsion mechanisms[J].Journal of Bionic Engineering, 2013, 10(4): 434-445.
[5] 谭兴军. 偏心轮腿六足机器人设计与分析[D].重庆:西南大学, 2011.
[6] Manton S M. The arthropoda: habits functional morphology and evolution[M].Oxford:Clarendon Press, 1977.
[7] McGhee R B, Iswandhi G I. Adaptive locomotion of a multi-legged robot over rough terrain [J]. IEEE Transations on Systems Man and Cybernetics, 1979, 9(4): 176-182.
Gait Planning of a Hexapod Robot in Stair Climbing
KONGZiwen,ZHANGShiwu,XUMin
(Department of Precision Machinery and Precision Instrument, University of Science and Technology of China, Hefei 230027,China)
As one of the most complex obstacle in the common working environments, stair presents a serious challenge to robots’ propulsion ability in unstructured environment. This paper investigates recent research status of stair-climbing robot, presents tetrapod gait of a hexapod robot Amphihex, describes the stability coefficient calculation of the tetrapod gait, applies the gait planning to different stair climbing, and verify the gait planning method in experiments, which offers guidance on system design and decision making.
hexapod robot; gait planning; stability coefficient
2014-05-05
TP242.6
A
1001-2257(2014)09-0077-04
孔子文(1990-),男,安徽阜阳人,硕士研究生,研究方向为智能机器人。
