基于十字滑块的具有容差能力的螺钉拆卸工具设计
2014-09-06,,
, ,
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001)
基于十字滑块的具有容差能力的螺钉拆卸工具设计
高文锐,孙奎,金明河
(哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨 150001)
螺钉拆卸工具是空间在轨服务中常用的一种工具,基于十字滑块的位置补偿功能,设计了一种具有容差能力、可针对不同规格圆柱头螺钉进行操作的螺钉拆卸工具,并着重对十字滑块、校正片弹簧以及工具整体的动态响应性能进行了设计与分析。首先对十字滑块机构的运动特点进行了系统分析;接着利用有限元软件参数化设计方法确定了校正片弹簧尺寸参数并拟合出刚度曲线;再利用动态仿真软件验证了工具的径向动态响应性能的快速性和平稳性,并将其与安装相同当量刚度圆柱弹簧的工具进行性能比较。十字滑块的使用使螺钉拆卸工具具有一定的容差能力,提高了工具设计的紧凑性,扩展了工具在航天领域的使用范围。
螺钉拆卸工具;十字滑块;容差能力;在轨服务;校正片弹簧
0 引言
由于空间在轨任务对象属性(如载荷的形状、大小、质量、惯性等)千差万别,设计多种能够与机械臂末端执行器通过标准接口连接的操作工具已成为国际上的普遍做法[1-6]。在各种工具中,螺钉拆卸工具是最常用的工具之一,也是工具箱设计中的难点。
因此,设计了一种具有容差能力的螺钉拆卸工具,该工具不仅能够通过内外轴的十字滑块结构来实现位置误差的补偿,还通过夹紧爪的弹簧结构实现了针对多种型号螺钉的拆卸。鉴于工具在操作时需要快速响应位置偏差以及在操作后浮动部分需要复位,分析设计了校正片弹簧的参数结构,并针对工具的动态径向响应性能进行了分析,得到了动态响应迅速、运行平稳的螺钉拆卸工具。
1 螺钉拆卸工具的方案设计
1.1 技术指标要求
螺钉拆卸工具安装在机械臂的末端执行器上,末端执行器和螺钉拆卸工具之间通过标准接口连接,可以传递来自于末端执行器的内环单独转动和内外环同时转动2种机械动力,如图1所示。
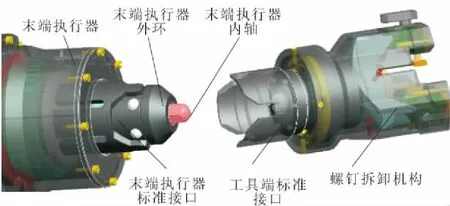
图1 末端执行器的动力输出源
设计的螺钉拆卸工具属于一种末端操作工具,应用于空间小型灵巧机械臂。螺钉拆卸工具应实现2个功能:能够自行对螺钉进行位置校正补偿;能够操作不同型号的内六角圆柱头螺钉(外形尺寸不同,但六角孔尺寸应相同),提出表1所示的设计指标。
表1 设计指标

设计指标数值设计指标数值工具质量<0.5kg径向容差±2.5mm输出力矩>15N·m操作螺钉型号M4~M8
1.2 螺钉拆卸工具的工作原理
螺钉拆卸工具的整体组成和原理如图2所示。

图2 螺钉拆卸工具的组成及原理
工具中内轴和外环十字滑块的使用,使工具外壳可以带动丝杠丝母和夹紧爪整体径向浮动,而校正片弹簧则用于对浮动外壳位置的快速响应及复位;末端执行器内环单独转动时的运动传递路径为:内轴十字滑块—丝杠丝母机构—夹紧爪(六角执行头),而末端执行器内外环同时转动时则使工具整体转动。
螺钉拆卸工具的内外轴十字滑槽结构如图3所示。2个十字滑块使工具外壳带动夹紧爪和六角执行头整体浮动以适应螺钉头的位置偏差。夹紧爪和六角执行头的结构如图4所示。
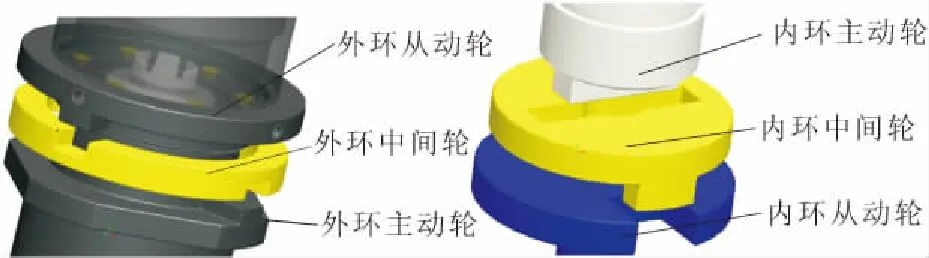
图3 内外轴十字滑槽结构

图4 夹紧爪及六角执行头结构
夹紧爪上方斜滑槽和丝母接触,配合下方和外壳接触平行滑槽,使得当丝母向下运动时,夹紧爪向工具轴线方向径向平移,夹紧爪右端的压缩弹簧用于补偿不同型号螺钉头的尺寸,左端的拉伸弹簧用于自身复位;六角执行头前端采用球形设计以使其在插入螺钉六角孔时具有一定的容差性,由于六角执行头的尺寸固定,因此,不同型号的螺钉应具有相同的六角孔,但考虑到可操作螺纹的直径跨度较大及螺钉安装机构的几何限制问题,螺钉头的外径是不同的;丝母和校正片弹簧结构如图5所示。

图5 丝母及校正片弹簧结构
丝母的3个伸出梁侧面与外壳滑槽接触以保证丝母上下运动,伸出梁底部与夹紧爪斜滑槽接触以保证夹紧爪径向平移运动;校正片弹簧用于对十字滑块位置偏差的快速响应和复位,由4个片弹簧按正交方向安装在十字滑块主动轮的周围。在上述的设计中,通过夹紧爪上的压缩弹簧来实现对多种型号螺钉尺寸的适应性,通过内轴和外壳上的十字滑槽来实现操作工具和螺钉之间的位置补偿。
螺钉拆卸工具的运动分为4个阶段(在图2中用数字标出):自由运动阶段、位置校正阶段、螺钉插接阶段以及螺钉拆卸阶段。在运动过程中,首先工具内环单独转动带动丝杠丝母传动,丝母向下运动使得夹紧爪向工具中心轴线方向平移。运动开始时夹紧爪没有碰到螺钉头,此时为自由运动阶段;当夹紧爪碰到螺钉头时,内外轴十字滑块移动以补偿位置,此时为位置校正阶段;当工具完成位置校正后夹紧爪继续向前运动,压缩弹簧开始压缩以使六角执行头有足够的行程插入六角孔中,此时为螺钉插接阶段;最后工具内外环同时转动以拆卸螺钉,此阶段为螺钉拆卸阶段。
2 容差能力的零件性能分析与设计
2.1 十字滑块的运动分析


图6 十字滑块运动分析
从运动分析可知,当主从轮存在位置偏差时,十字滑块输出的运动无速度波动,但中间轮相对于主从轮存在相对滑动和向心加速度。由于螺钉拆卸工具转速很慢,且相对滑移带来的摩擦损耗对十字滑块的效率影响十分小,故可忽略两因素对十字滑块的影响。
2.2 校正片弹簧的设计2.2.1 片弹簧的预变形量
如图5和图7所示,片弹簧安装于外十字滑槽和壳体之间。图7中,H为外十字滑槽的接触面偏距;R为外十字滑槽的轮廓半径;S为片弹簧的跨距;A为片弹簧的初始倾角;t为片弹簧厚度。

图7 片弹簧模型机参数
根据式(1),可以算出片弹簧的预变形量,即拱形片弹簧最高点与浮动块位于正中位置时响应表面间的距离为:

(1)
当H=23mm,R=33mm,t=0.1mm时,得到片弹簧跨度S和倾角A与预变形量的关系如图8所示。

图8 片弹簧预变形量
从图8可知,片弹簧的预变形量对片弹簧的跨度和倾角2个因素均敏感。随着片弹簧倾角和跨度的增大,片弹簧预变形量增大。由于预变形量关系到片弹簧的预载荷和最大变形量,所以选取片弹簧参数时要综合考虑倾角和跨度这2个因素。
2.2.2 片弹簧参数选取及刚度拟合
由片弹簧片按正交方向安装和只受法向力的特点可知,弹簧力只与片弹簧的法向压缩量有关,故可简化为单方向受力模型,即浮动块只会沿着片弹簧的法向对其进行单方向挤压,随着法向力的增大,挤压面积也就越大。
由于片弹簧是大变形柔性体,采用有限元接触分析方法来确定敏感参数往往计算速度较慢[7]。为了快速确定参数,参考弯曲拱梁的接触受力变形经验,选取跨度长度的1/3~1/2的对中区域,采用均布载荷代替浮动块施加给片弹簧的挤压力,进行变形量分析。利用Workbench软件中的DOE优化方法(实验设计方法),将片弹簧宽度w、片弹簧厚度t和切缝倾角A等参数作为设计变量,并施加35 N法向均布载荷,片弹簧材料选用弹簧常用材料60Si2Mn,最终得到片弹簧的变形量如图9所示。
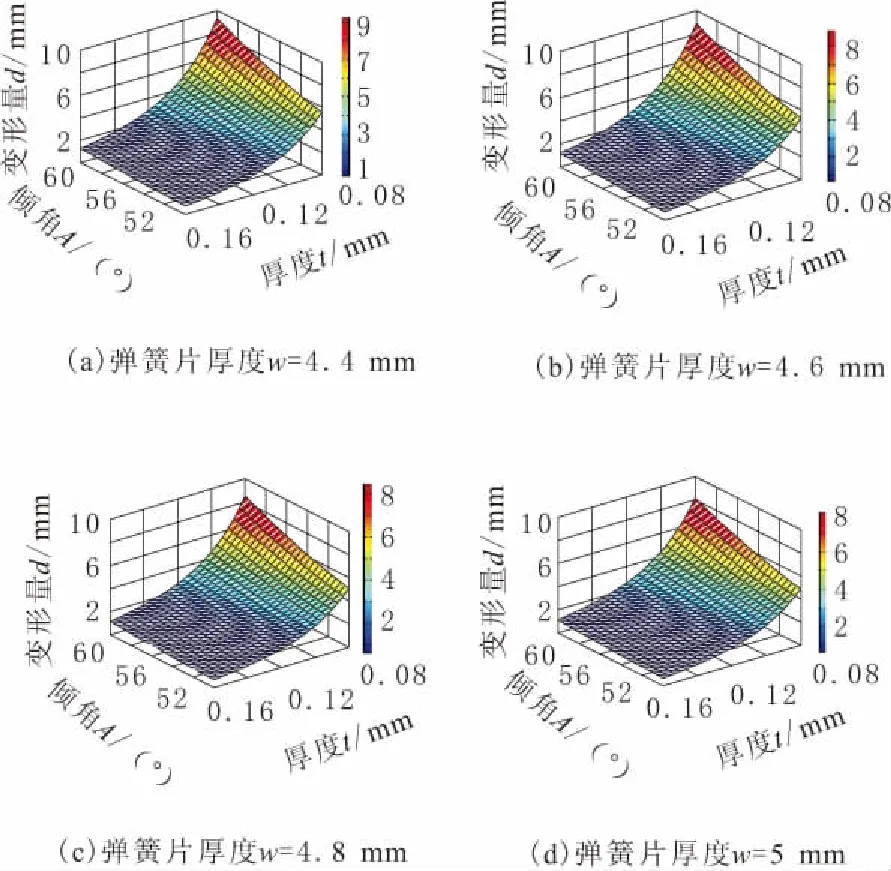
图9 局布分布载荷变形量
从图9可以看出,片弹簧的变形对厚度、宽度和倾角因素都是敏感的,随着厚度的增大、宽度的增大以及倾角的减小,片弹簧的刚度增大,其中厚度对弹簧刚度影响最大,宽度次之,倾角最弱。
考虑到容差能力的要求,初始变形量较小时径向快速响应,当快达到容差极限时,刚度应当变得较大,以使偏移运动稳定下来,同时可以很好地抵抗外部的轻微扰动。由此选定片弹簧的宽度为4.8 mm,倾角为55°,厚度为0.1mm,跨度为28.5 mm,此时的预变形量为0.7 mm。
对选定参数的片弹簧利用Workbench软件进行接触分析,等间距地增大受力并测出浮动块的位移,将得到的数据进行四阶刚度拟合,片弹簧刚度拟合多项式如式(2)所示。其拟合品质可达到0.997 8,即拟合曲线可解释其中99.78%的数据[8]。
F=2.227 3x4-8.287 8x3+13.7130x2-
1.3833x+0.7913
(2)
2.3 工具径向响应性能仿真
确定片弹簧参数后,还需分析工具整体对位置误差的径向动态响应性能,并将其与具有相同当量刚度的线性圆柱弹簧的响应性能进行比较,利用ADAMS软件建立仿真平台。建立仿真平台如图10所示。在中心浮动块和周围四根弹簧之间建立过渡滑块,以模拟片弹簧只受法向力的特点;考虑到片弹簧接触受力分离不受力以及刚度非线性的特点,自定义片弹簧和线性圆柱弹簧的刚度曲线、长度、阻尼系数及预载力等;最后考虑阶跃输入对系统来说是最严峻的工作状态[9]。所以在初始状态分别令浮动块沿0°,15°,30°和45° 4个方向平移2.5 mm,并测量浮动块中心回到原点的动态性能,浮动块的质量和惯量信息如表2所示。
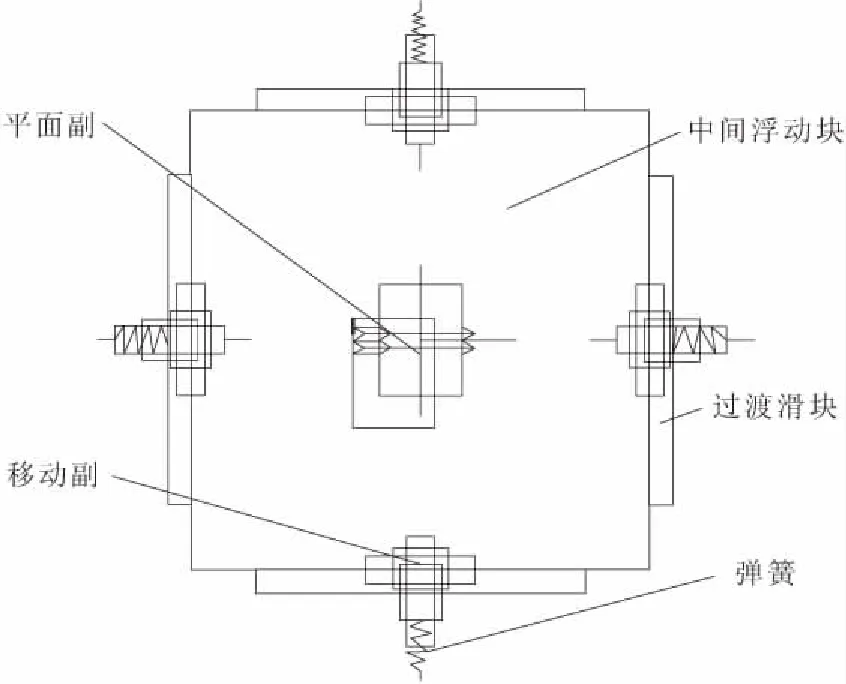
图10 工具径向动态仿真平台
表2 工具浮动块的质量与惯量数据

参数M/kgIxx/(kg·mm2)Iyy/(kg·mm2)Izz/(kg·mm2)值0 303892 0500e+025 8818e+025 8772e+02
注:惯性张量是相对于ADAMS模型的质心运用Pro/E测算的;另外由于浮动块周向120°对称,故惯量积均为0。
在开始仿真之前,还需确定片弹簧的当量刚度以及弹簧的阻尼系数。相同当量刚度是指两者在预变形量处具有相同的载荷,线性圆柱弹簧当量刚度的计算为:
k=F/Δx=4.24/0.7=6.06 N/mm
(3)
另外根据结合面法向接触参数的估计方法[10],可知片弹簧法向阻尼的估计为:

=0.085 N/mm
(4)
为弥补估计的阻尼系数的粗糙性,扩大阻尼系数的取值范围,在0.01~0.5之间取多组值进行仿真。
经过ADAMS仿真,得到工具浮动块在不同角度偏移时的径向响应曲线。由于响应性能受角度偏移的影响非常小,故只显示安装非线性片弹簧及线性圆柱弹簧的工具在45°偏移时的响应曲线,如图11所示。

图11 非线性弹簧及线性弹簧的响应曲线
由图11可知,安装有非线性片弹簧和线性圆柱弹簧的工具对浮动块的径向动态响应性能(时间和振荡超调)受角度偏移的影响较小,而受阻尼系数影响较大:随着阻尼系数的增大,响应超调量逐渐减小(阻尼系数大于0.06时不会出现超调),响应时间则逐渐增大;在相同的阻尼系数下,安装非线性片弹簧的工具响应时间较安装线性圆柱弹簧的响应时间缩短了将近1倍,并且响应超调量要略小于安装线性圆柱弹簧的工具。
以上结论说明,安装非线性片弹簧的工具在径向动态响应的快速性和平稳性上,都较安装线性圆柱弹簧的工具具有优势;并且使用非线性片弹簧的工具还有结构紧凑和安装方便等优点。
3 结束语
设计了一种以十字滑块为核心零件的具有位置补偿功能的螺钉拆卸工具,通过运动和效率分析,论证了十字滑块装置具有结构简单紧凑、主从轴无速度波动等优点。鉴于螺钉拆卸工具应具有径向快速响应和操作后浮动外壳复位的功能,设计了校正片弹簧,通过有限元软件中的DOE分析及接触分析,确定出片弹簧的结构和安装尺寸并拟合出其刚度曲线。最后利用ADAMS仿真对工具整体的径向响应性能进行分析,通过与相同当量刚度的圆柱弹簧比较,证明了片弹簧动态性能的优越性。
[1] Nishida S, Yoshikawa T. A new end-effector for on-orbit assembly of a large reflector[C]//International Conference on Control, Automation, Robotics and Vision, IEEE, 2006:1-6.
[2] Reynerson C M. Spacecraft modular architecture design for on-orbit servicing[C]//Aerospace Conference Proceedings, IEEE, 2000,4:227-238.
[3] 钱 山.在轨服务航天器相对测量及姿态控制研究 [D].长沙:国防科学技术大学,2010.
[4] Michaud S,Dominguez M,Nguyen U,et al. Eurobot end-effectors[C]//Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation,2004.
[5] Parrish C J. The ranger telerobotic shuttle experiment:an on-orbit satellite servicer[C]//Artificial Intelligence,Robotics and Automation in Space,1999.
[6] Roberts B J. Using the international space station as a precursor to in-orbit robotic servicing[C]//American Institute of Aeronautics and Astronautics,2010.
[7] 庄 茁. 基于ABAQUS的有限元分析和应用[M]. 北京:清华大学出版社,2009.
[8] William J. Palm III:introduction to MATLAB 7 for engineers [M].Beijing:Tsinghua University Press,2007.
[9] 胡寿松.自动控制原理[M].5版.北京: 科学出版社,2007.
[10] 尤晋闽,陈天宁. 基于分形接触理论的结合面法向接触参数预估[J]. 上海交通大学学报,2011,45(9): 1275-1280.
Design of Screw Removement Tool with Misalignment Adjustability Based on Cross Slipper
GAOWenrui,SUNKui,JINMinghe
(State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin 150001,China)
Screw removement tool (SRT) is a frequently-used tool in the on-orbit servicing. Based on the cross slipper,an automatic SRT is designed in the paper,which has the misalignment adjustability and can operate hexagonal socket screw of different sizes,especially focusing on the design of cross slipper,arch flat spring and the analysis about the dynamic response of SRT. Firstly,the motion characteristic of cross slipper are analyzed. Then,through parameter design and contact analysis with FEA software,analyze and optimize the effect on performance of arch flat spring from the variables,acquire the stiffness fitting curve and validate the rationality of the selected parameter. Through importing the stiffness curve to ADAMS,the response rapidity and stability of the SRT are validated and compared with the SRT mounted with the cylindrical spring. The application of the cross slipper endows the SRT with a certain misalignment adjustability,and greatly enhances the compactness of the grapple interface,which expands applied range of tools in the aerospace field.
screw removement tool; cross slipper; misalignment adjustability; on-orbit servicing; arch flat spring
2014-05-12
国家973计划资助项目(973-2013CB733103);新世纪优秀人才支持计划资助(NCET-10-0058)
TH122;TH128
A
1001-2257(2014)09-0010-05
高文锐(1990-),男,辽宁盘锦人,硕士研究生,研究方向为空间机器人技术;孙奎(1974-),男,黑龙江哈尔滨人,博士研究生,讲师,研究方向为冗余机器人运动学和动力学算法,空间机器人技术;金明河(1970-),男,黑龙江哈尔滨人,博士研究生,教授,研究方向为多指灵巧手,空间机器人技术。
