基于压力垫系统的人体压力中心估计方法研究*
2014-09-06毛志勇沙长源
王 典,毛志勇,沙长源,蔡 萍
(上海交通大学电子信息与电气工程学院仪器科学与技术系动态检测研究室,上海 200240)
基于压力垫系统的人体压力中心估计方法研究*
王 典,毛志勇,沙长源,蔡 萍*
(上海交通大学电子信息与电气工程学院仪器科学与技术系动态检测研究室,上海 200240)
为研究压力垫在静态平衡和步态检测两个方面替代测力台的可行性,深入比较了利用压力垫和测力台计算得到的压力中心(COP)的异同。利用了平衡功能综合测力台,其包括测量分布力的压力垫系统和集总力测力台系统;这两个系统同步采样,确保测量结果得以相互比较。18名被试者以双脚直立、倾斜、左右摇晃和单脚站立等站立姿态完成测试。并且通过被试者的步态数据利用线性回归的方法,建立行走中的压力中心坐标与压力敏感单元的模型。通过t-检验和相关系数来分析比较两个测量系统得到的结果;并且验证所建立的线性回归模型的准确性。经实验验证,两个系统计算得到的COP具有较高的一致性;分析比对结果表明按足底解剖结构放置8个压敏单元能够较为准确反映压力中心的动摇轨迹。
压力中心;步态;人体静态平衡;线性回归
研究压力中心COP(Center of Pressure)的动摇情况对于进行人体的步态分析和评估平衡能力等方面都有着非常重要的意义[1]。通过比较行走时足底压力中心(COP)的运动轨迹,可以评价胫骨截肢病人安放义肢后,义肢对正常足造成的影响[2]。有研究发现,在行走过程中,COP控制着人体质心的前移[3-4]。安放假肢后的截肢病人,如果其压力中心异于正常人,会影响他们保持动态平衡的能力[5]。与此同时,COP的动摇轨迹也可以被用于评价视觉刺激对人体平衡能力的影响[6]。
多维测力台通常被视为分析足底压力中心的金标准,其通过测得的6个力分量的瞬时值计算出压力中心,由此评估人体的平衡能力[7]。但测力台比较笨重,体积过大,只能用于固定安装地点检测。进行步态检测时,通常需要两个或两个以上的测力台才能够完成。因此,其应用受到一定的限制。
压力垫因其轻薄柔软,可被用作穿戴式测量,越来越受到人们的重视。压力垫包含众多横纵向带状导体的交叉点;这些交叉点即压敏阵列单元,当有外力作用到这些压敏阵列单元上时,其阻值会发生变化,从而反映压力分布情况[8-9]。目前已有研究利用足底与压力垫接触面积的大小来识别步态[10]。但是压力垫与测力台的测量结果是否一致,目前尚无定论。当利用压力垫检测步态时,如果可以选用相对较少的敏感点,就可以简化设计,给后续的测量工作带来便利。美国加州大学伯克利分校的Kazerooni H等人利用分别放置在脚趾、跖骨、足弓和足跟的4个区域的压力传感器的信息和肌电信息一起对负重和能量自主外骨骼机器人(BLEEX)进行反馈控制[11]。但是其足底压力传感器安装于外骨骼上,并没有直接采集穿戴者的足底压力信息;故其提供的信号可能不够精确。因此本文主要解决的问题有二:一、考察利用压力垫系统与测力台的测量结果进行COP分析的估计精度;二、优化压力垫压敏阵列单元的位置和数量。

图1 综合测力台的系统框图
1 实验系统构成
综合测力台构成如图1所示,可以同步采集集总力和分布力数据,主要包括集总力测量模块、分布力测量模块、FPGA主控模块、USB通信模块和数据处理及用户界面等5部分。集总力测量模块包括测量Fx、Fy、Fz3个方向上的力及Mx、My、Mz3个方向的力矩的六维测力台;6路信号放大及具有6路同步模数转换能力的芯片AD7656。分布力测量模块包括空间分辨率为4 cell/cm2,单足计36行39列的压敏阵列,零电势放大电路及快闪式模数转换芯片AD9012[12]。FPGA主控程序分成3个模块,集总力测量控制模块对集总力6个通道的信号进行同步数据采集;分布力测量控制模块对36×39的压敏阵列进行行列扫描,逐一选通各个压敏单元;控制快闪式A/DC,读入压力分布数据;数据帧拼装模块用于将集总力数据和分布力数据组成一个数据帧。FPGA的并行执行能力[13],保证了集总力和分布力测量的同步性。USB模块实现USB2.0数据传输。上位机程序接收测量数据、进行相关处理,并提供人机交互界面。
本系统的数据采集速率主要取决于压力分布测量模块的相关指标。压力分布测量模块选用的快闪式模数转换芯片AD9012,其转换速率高达100 Msample/s,一次转换的译码时间及0.01 μs,而主控芯片FPGA的主频为20 MHz,按启动一次转换并完成数据存储需5个机器周期计,一帧压力分布数据采集的时间不超过0.5 ms,满足人体步态分析和平衡功能评估的要求。
由集总力测量数据求取压力中心坐标的计算式为[14]:
COP_X1=My/Fz
COP_Y1=MX/Fz
其中COP_X1是COP的X坐标;COP_Y1是COP的Y坐标;Mx和My是X和Y方向上的力矩,Fz是Z方向的地力。
由足底压力分布数据求取压力中心坐标的计算式为[15]:
COP_X2=∑(pressure(xi,yi)*xi)/pressure(xi,yi)
COP_Y2=∑(pressure(xi,yi)*yi)/pressure(xi,yi)
其中COP_X2和COP_Y2是COP的X和Y方向的坐标;pressure(xi,yi)是坐标为(xi,yi)的压敏单元上测得的分布力的大小;(xi,yi)是压敏单元的X和Y方向的坐标。
2 实验结果与分析
2.1 压力垫与测力台系统COP估计一致性评估
共有18名被试者(12名男性,6名女性;年龄(24.8±3)岁;体重(59±11.8)kg)参与此次实验。每个被试者分别完成6组实验,每组实验的持续时间为30 s:双足站立、前倾、后仰、左右摇晃、左脚单独站立和右脚单独站立。然后选择鞋码一样的被试者完成步态检测实验。步态检测实验要求被试者在行走的过程中,左脚有一步完全踏在综合测力台上,使得压力垫和测力台都能够完整的记录下这一动作的足底压力数据。
表1中列举了分别利用测力台和压力垫数据计算的压力中心位移的t检验结果和线性相关系数。利用测力台和压力垫分别得到的压力中心在A/P(Anterior/Posterior)方向和M/L(Medio/Lateral)方向的位移在检验水平0.05的条件下,均无明显的差异,并且相关性很高。这就说明压力垫的测量结果和测力台的测量结果有很好的一致性,在某些场合,可以用压力垫代替测力台进行人体足底压力中心的测量。

表1 足底压力中心动摇轨迹的t检验结果和相关系数
注:N代表无差异。
2.2 足底压力敏感单元配置优化设计
实际应用尽可能少的压力敏感单元获得尽可能准确的COP估计以简化系统。本研究利用位于不同足底分区的压敏阵列单元的压力值总和模拟一个压敏单元,以此分析不同数量、不同位置的压敏单元配置对COP测量结果的影响。
如果在足底放置两个压敏传感器,则在跖骨和足跟部分各放置一个;如果放置3个压敏传感器,则在脚趾、跖骨和足跟各放置一个;4个压敏传感器则分别放置在第1脚趾、第2~5脚趾、跖骨和足跟;5个压敏传感器分别放置在第1脚趾、第2~5脚趾、跖骨、足跟内侧和足跟外侧;8个压敏传感器分别放置在第1脚趾、第2~5脚趾、第1跖骨、第2~4跖骨、第5跖骨、足弓、足跟内侧和足跟外侧;10个压敏传感器分别放置在第1脚趾、第2~5脚趾、第1跖骨、第2~4跖骨、第5跖骨、足跟内侧上半部、足跟内侧下半部和足跟外侧上半部、足跟外侧下半部(A/P方向)或者10个压敏传感器分别放置在第1脚趾、第2~5脚趾、第1跖骨、第2~4跖骨、第5跖骨、足跟内侧左半部、足跟内侧右半部和足跟外侧左半部、足跟外侧右半部(M/L方向)。相关足底分区的示意如图2所示。表2和表3分别列出了足底压力中心在A/P和M/L方向上,利用线性拟合方法得到COP估计值的标准差。
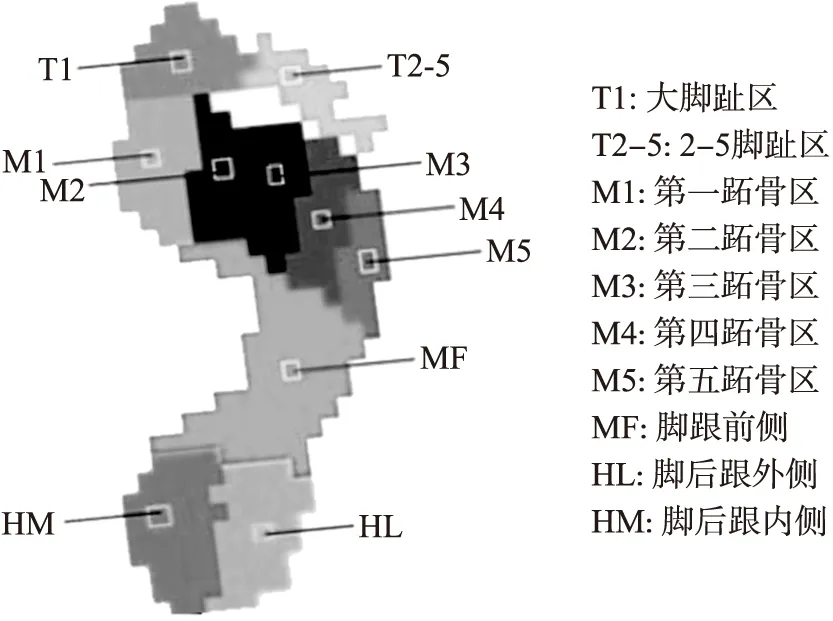
图2 足底生理分区示意图
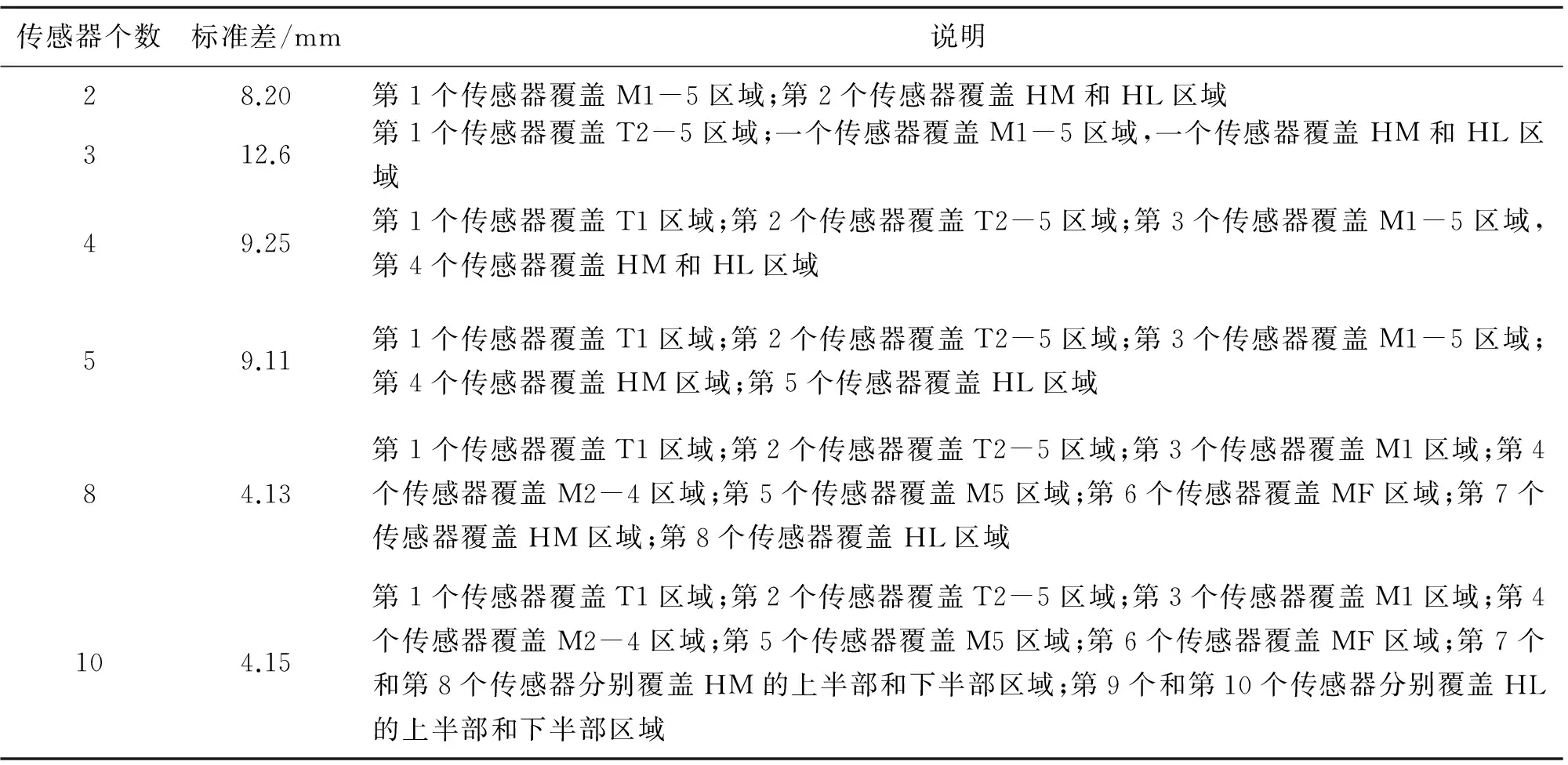
表2 COP在A/P方向上拟合结果

表3 COP在M/L方向上的拟合结果
由表2可以看出随着敏感单元个数的增加,COP在A/P方向上的标准差的变化趋势是逐渐减小的;但是敏感单元从8个增加到10个,得到的拟合方程的标准差基本不变。虽然在A/P方向上,当敏感单元从两个增加到3个,得到的COP标准差是增加的,但是其标准差仍然大于利用8个压敏单元得到的线性拟合方程的标准差。而在表3中,随着敏感单元个数的增加,COP在M/L方向上的标准差的变化趋势是逐渐减小的。当放置8个敏感单元时,利用其分别放置在第1脚趾、第2~5脚趾、第1跖骨、第2~4跖骨、第5跖骨、足弓、足跟的敏感单元的数据得到的拟合方程,基本可以得到准确的在A/P和M/L方向上的COP坐标。
3 结论
利用测力台数据和压力垫数据计算出的压力中心的动摇轨迹和包络面积具有较高的一致性和相关性;压力垫数据可以很好的反映出压力中心的动摇。与此同时,本文还建立了关于压力中心动摇轨迹的模型,分别是A/P方向和M/L方向。经实验验证,在足底放置8个压敏单元能够较为准确反映压力中心的动摇轨迹,基于此的穿戴式测量能够不受环境的限制;为计算足底压力中心的动摇轨迹提供了一种新的方法。
[1] Alain Hamaoui,Yola Friant,Serge Le Bozec. Does Increased Muscular Tension Along the Torso Impair Postural Equilibrium in a Standing Posture?[J]. Gait and Posture 2011,34:457-461.
[2]Schmid M,Beltrami G,Zambarbieri D. Centre of Pressure Displacements in Trans-Femoral Amputees during Gait[J]. Gait and Posture,2005,21:255-262.
[3]Torburn L,Perry J,Ayyappa E. Below-Knee Amputee Gait with Dynamic Elastic Response Prosthetic Feet:A Pilot Study[J]. Rehabil Res Dev,1990,27:369-384.
[4]Zernicke R F,Hoy M G,Whiting W C. Ground Reaction Forces and Centre of Pressure Patterns in the Gait of Children with Amputation:Preliminary Report[J]. Arch Phys Med Rehabil,1985,66:736-741.
[6]Alexander Ruhe,René Fejer,Bruce Walker. The Test-Retest Reliability of Center of Pressure Measures in Bipedal Static Task Conditions—A Systematic Review of the Literature[J]. Gait and Posture,2010,32:436-445.
[7]Cabeza-Ruiz R,Garcia Masso X,Centeno-Prada R A,et al. Time and Frequency Analysis of the Static Balance in Young Adults[J]. Gait and Posture,2011,33:23-28.
[8]陈雁西,俞光荣. F-Scan足底压力步态分析仪临床应用现状[J]. 国外医学(骨科学分册),2005(3):187-189,192.
[9]庄燕子,蔡萍,周志锋. 人体压力分布测量及其传感技术[J]. 传感技术学报,2005,18(2):313-317.
[10]Ana Paula Ribeiro,Francis Trombini-Souza,Vitor D Tessutti. The Effects of Plantar Fasciitis and Pain on Plantar Pressure Distribution of Recreational Runners[J]. Clinical Biomechanics,2011,26:194-199.
[11]Ryan Steger,Sung Hoon Kim,Kazerooni H. Contorl Scheme and Networked Control Architecture for the Berkeley Lower Extremity Exoskeleton(BLEEX)[C]//Proceeding of the 2006 IEEE Intermational Conference on Robotics and Automation. 2006:3469-3476.
[12]蔡楷,毛志勇,蔡萍. 电阻式压力敏感阵列足底压力测量及噪声滤除方法研究[J]. 传感技术学报,2013,26(1):12-16.
[13]孟庆浩,边旭东,扈佳林,等. 基于FPGA 的多路无串扰超声测距系统的设计与实现[J]. 传感技术学报,2013,26(4):582-589.
[14]Lafond D,Duarte M,Prince F. Comparison of Three Methods to Estimate the Center of Mass during Balance Assessment[J]. Journal of Biomechanics,2004,37:1421-1426.
[15]Tai Ryoon Han,Nam Jong Paik,Min Sik Im. Quantification of the Path of Center of Pressure(COP)Using an F-Scan in-Shoe Transducer[J]. Gait and Posture,1999(10):248-254.

王典(1986-),女,博士研究生,研究方向为压力传感器技术、压力分布技术,wangdian215@sjtu.edu.cn;

蔡萍(1963-),女,博士,上海交通大学教授。主要研究方向为力觉信息检测技术,动态检测技术,pcai@sjtu.edu.cn。
StudyontheEvaluationofCOPviaPressureInsoleSystem*
WANGDian,MAOZhiyong,SHAChangyuan,CAIPing*
(Dynamic Measurement Group,School of Electronic Information and Electrical Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)
To investigate the possibility of substituting force platform with pressure insole system in the analysis of COP and establishing a wearable static equilibrium or stepping intention analysis system,this study makes a thorough comparison between COP parameters obtained with the pressure insole system and the force platform respectively. The experiment set is a dedicatedly developed integrated measurement system which includes two measurement channels:pressure insole channel and force platform channel. The data of two channels are synchronously sampled that ensures the comparability of the two channels. Eighteen subjects are recruited for the data collection and the inspecting postures include bipedal upright stance,leaning,medio-lateral swing and standing on one leg. The results of both channels were compared via student test and correlation analysis. It is demonstrated that the results obtained with pressure insole system agree well with the result got with the force platform and COP could be estimated accurately via the eight pressure cells placed under the foot.
center of pressure;gait;static balance;linear regression
项目来源:国家科技支撑计划重点项目(2009BAI71B06);国家自然科学基金重大项目(61190124)
2014-08-22修改日期:2014-10-23
TP212.9
:A
:1004-1699(2014)12-1596-05
10.3969/j.issn.1004-1699.2014.12.002
