一种新的足球机器人色标设计方法
2014-09-04
(西华大学机械工程与自动化学院,四川 成都 610039)
半自主足球机器人的色标设计方法是实现对机器人进行编程控制的基础。色标设计的好坏直接影响到整个机器人的对抗性能和对抗策略的执行能力[1-2]。目前,国内的半自主足球机器人色标设计方法是根据不同颜色、不同形状或者是不同颜色与形状的组合来确定机器人小车的位置、朝向、队员号以及运动方向等。其中具有代表性的色标设计方法[3-6]大致有如图1中所示几种。
图1(a)中,机器人小车方位角为小车顶部中心和副色标中心的连线方向,机器人的队号通过不同的副色标颜色来区别。该方案虽然具有算法简单、实时性较高等优点,但是非常容易发生混色现象[7](2种颜色互相干扰),如图2所示。当2个机器人在对抗比赛中距离过近或发生相撞后,色标受干扰就非常容易出现位置和角度的偏差,影响机器人策略。图1(b)表示通过一条矢量线确定机器人小车的正方向,通过副色标来辅助决定机器人的队号。该方案具有色块中心稳定,位置、角度精度高,抗干扰能力强等特点,同时避免了粘连现象的发生;但是由于识别算法复杂,导致在对抗激烈的赛场上实时性差,策略容易滞后等[8]。图1(c)表示利用2个圆形的色标,其中大圆为队标,小圆为副色标(队员号),主副色标中心到小车中心的距离之比为1∶3。此方法的优点是发生粘连现象较少,抗噪能力较强,其缺点是辨识精度不高。

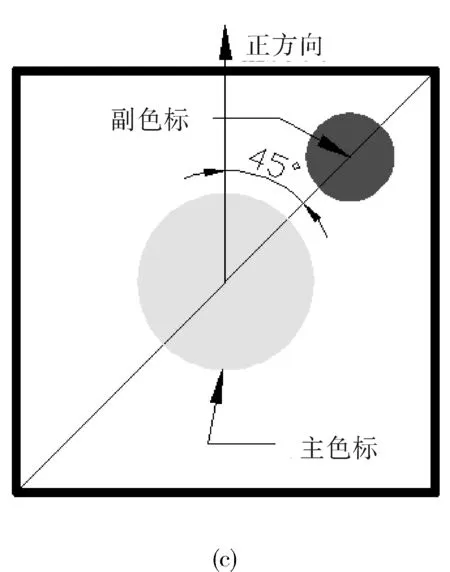
图 1 各种色标设计方案
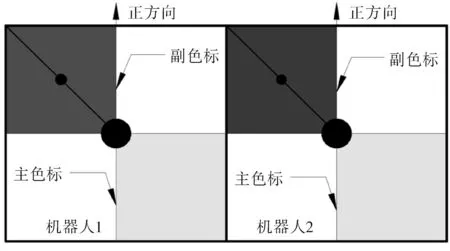
图 2 粘连现象
综上所述,目前仍然未见一种算法简单、响应速度快、辨识精度高、抗噪能力强的色标设计方法。为此,笔者在综合各队的色标设计方法特点的基础上,提出了一种新颖的色标设计方法。
1 色标的设计
1.1 色标颜色及形状
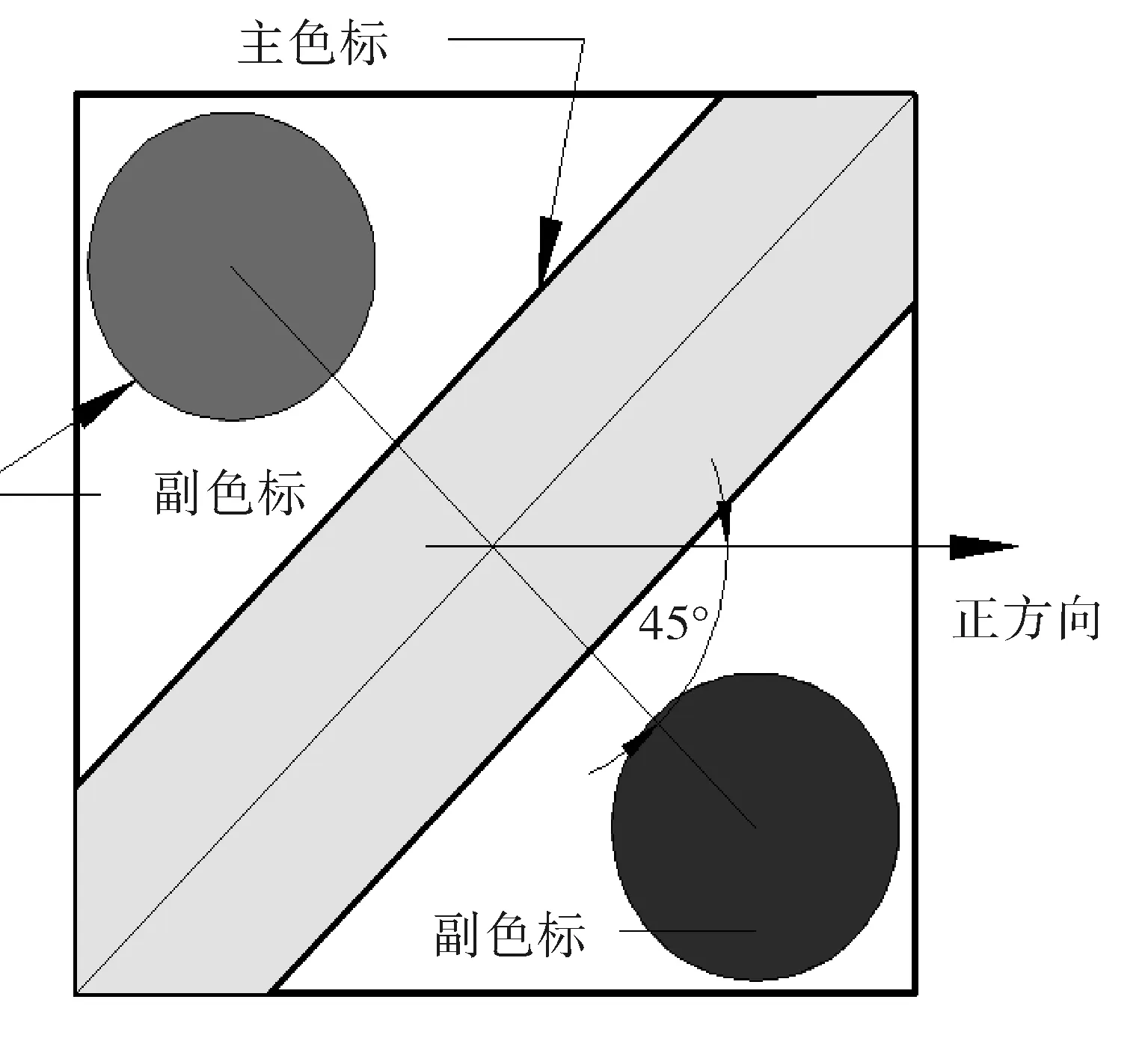
基于比赛场地光照等因素的影响,为使图像识辨算法尽量简单、快速、准确,本方案按照国际惯例将小车分为主色标(队标)和副色标(队员标志 )。将主色标设计为多边形,副色标设计为圆形。以足球机器人5VS5的比赛为例,在每个机器人小车上都使用1个主色标和2个副色标。其中主色标按照国际惯例,只取黄、蓝色,2个副色标根据实际情况进行变换。其队员号通过排列组合后按照一定规则分布来具体确定。
如图3所示,黄队和蓝队的队标放在机器人的斜对正中心。副色标主要为三基色,如绿、紫、粉,这样在本队队伍中就可以用3个副色标的颜色组合来区分5个队员。在确定队员编号时,可以按不同顺序排列,例如把绿、紫、粉作为0、1、2号球员,组合颜色粉紫、绿紫分别作为4、5号队员。其重心为队标中心(主色标区域中心),小车的前进方向是以小车色标的重心与副色标中心点连线成45°连线的方向。

(a)蓝队
(b)黄队
1.2 足球机器人位姿的判定
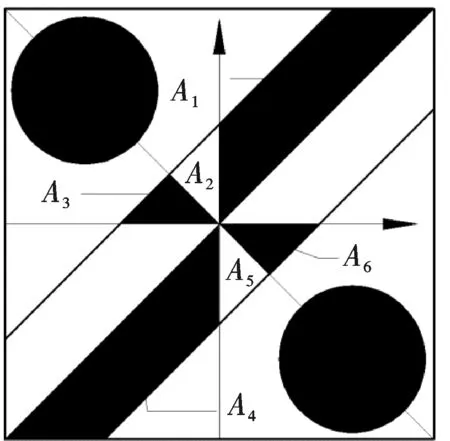
足球机器人的位姿是以足球机器人的中心位置来判定,即求得中心点就能知道机器人的位姿。其中心是通过对主色标的划分和统计获得的。方案中将主色标分为A1、A2、A3、A4、A5、A6,6个分区,如图4所示,中心坐标求解方法见式(1)和(2)。
设(x0,y0)为中心点坐标,则(x0,y0)为:
x0=(∑xA1+∑xA2+∑xA3+∑xA4+∑xA5+
∑xA6)/(nA1+nA2+nA3+nA4+nA5+nA6)
(1)
y0=(∑yA1+∑yA2+∑yA3+∑yA4+∑yA5+
∑yA6)/(nA1+nA2+nA3+nA4+nA5+nA6)
(2)
式中:∑xAi和∑yAi代表区域Ai(i=1,2,3,4,5,6)的相应队标特征颜色点的x坐标及y坐标的累加值;nAi代表区域Ai的符合队标特征颜色点的数量。
1.3 足球机器人队员色标中心的确定
受机器人尺寸所限,队员标志(副色标)在摄像头上所成的像比较小,一般只占几个到十几个像素;因此,在此方案中采取带阈值的重心法确定足球机器人队员的中心。
设图像灰度标志为f(x,y),x=1,…,m,y=1,2,…,n,那么对所采集图像进行阈值化可表述为

(3)
其中T为背景阈值。重心计算公式为:
(4)
(5)
1.4 机器人角度的求取
根据队标特点,并综合国内外各参赛队中的优秀方法[9-14],本方案利用机器人中心稳定的特点,提出了一种补偿逼近算法。
足球机器人主色标(队标)与副色标(队员色标)中心点连线为
(6)
利用求得的中心点连线为x坐标轴建立新坐标系。
先将主副色标沿x轴和y轴分割成2个对称部分,主副色标中心连线与x轴之间的夹角即为足球机器人的朝向角,如图4所示,其求解方程为:
(7)
(8)
(9)
(10)
式中(xu0,yu0)和(xd0,yd0)分别为x轴上半部分和下半部分的中心坐标,则有
(11)

机器人的朝向角补偿逼近具体算法如下:
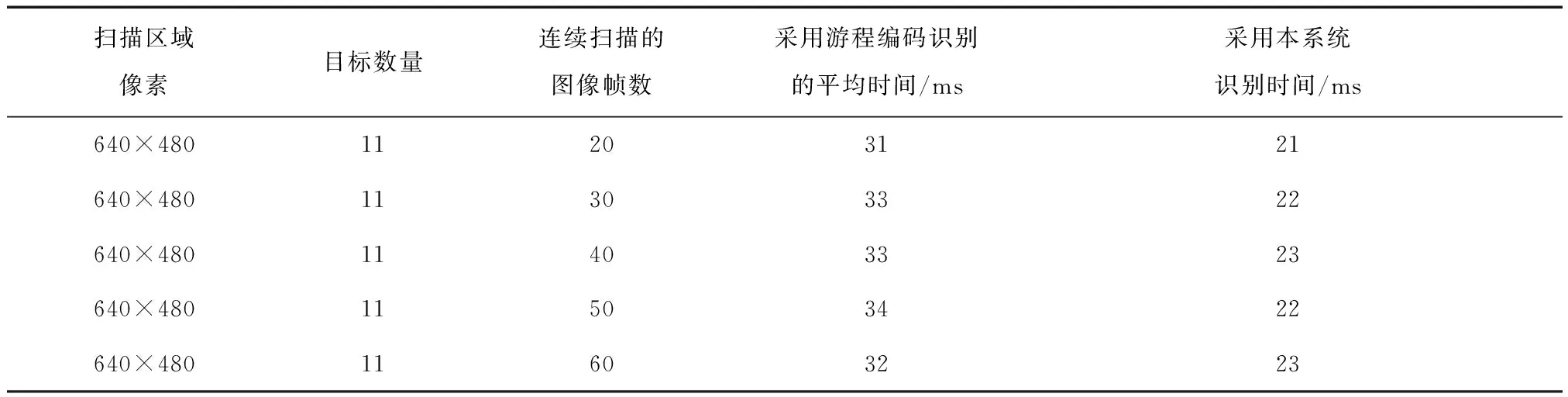
(xi (12) xi (13) xi>x0,yi>y0}; (14) xi>x0,yi>y0}。 (15) 由此可求出补偿后上下2个中心点坐标值,其求取公式如下: (16) yd′=(∑yA2+∑yA5+∑yA4+∑xA6-∑xA6′)/(nA2+nA5+nA4+nA6-nA6′); (17) xu′=(∑xA1+∑xA2+∑xA3+∑xA6-∑xA6′)/(nA1+nA2+nA3+nA6-nA6′); (18) yu′=(∑yA1+∑xA2+∑xA3+∑xA6-∑xA6′)/(nA1+nA2+nA3+nA6-nA6′)。 (19) 则有 (20) 笔者将此色标设计方案应用于FIRA足球机器人比赛中的5VS5半自主机器人足球项目。通过实验结果表明,这种方式能很好满足图像扫描的实时、快速性要求。图5为采用本方案后的辨识结果。从图5(a)可以看出,各色标在摄像头下所采集的图像清晰,队标与队员标识之间无干涉现象。从图5(b)中的预备情况可以看出,各色标均能被有效识别(为使视图的清晰,这里只截取了1、2、3号机器人的预备示意图),从箭头指示的情况来看,各色标的朝向角度计算正确,误差较小。 (a)比赛实景 (b)预备时各机器人的正方向指示图 图 5 色标应用 本文利用游程编码的方法与网格扫描的方法进行了对比分析,扫描对象为比赛双方的10名队员和小球,一共11个目标,研究结果如表1所示。可以看出,本文提出的方法具有用时少、实时性高、算法简单等优点,可以很好地提升足球机器人视觉系统的辨识能力,对于赢得比赛起到了一定的作用。这种方法在提高系统辨识精度和响应速度方面具有更大的优势。 表1 足球机器人视觉测试运行结果 针对现有大部分方案缺乏实时性的缺点,本文提出一种新颖的足球机器人色标设计方案,同时对该方法进行了实验研究。通过主色标是多边形副色标是圆形的混搭方案,增强了抗噪能力也避免了色标间的粘连现象,利用圆形副色标与多边形主色标之间的距离减少了色块边界的模糊及扩散造成的影响,从而提高了足球机器人视觉系统的辨识精度、响应速度和抗噪能力,减少其信号丢失。 [1]邓星桥.足球机器人视觉系统的研究[D].成都:西华大学,2004. [2]卢艳,徐雪松. 动态光照条件下足球机器人视觉目标的识别[J].计算机仿真,2013,30(3):376-379. [3]朱莹,洪炳镕,阮玉峰.全自主足球机器人快速目标识别与定位方法[J].哈尔滨工业大学学报:自然科学版,2003,35(9):1060-1068. [4]胡英,赵姝颖,徐心和.色标设计与辨识算法研究[J].中国图像图形学报,2002, 12(7):1291-1295. [5]方帅,胡英,徐心和.集控式机器人视觉子系统的关键技术[J].东北大学学报:自然科学版,2003,24(11):1029-1032. [6]李彤斐,杨马英.足球机器人视觉目标识别的PCA-SIFT算法[J]. 江南大学学报:自然科学版,2013(12):601-606. [7]曾达幸.中型组足球机器人的视觉识别与视觉定位研究[D]. 秦皇岛:燕山大学,2004. [8]王凤兰,洪炳镕,曙光.基于HSI颜色分布连续性特征的区域合并方法[J].哈尔滨工业大学学报:自然科学版,2003,35(9):1086-1088. [9]Qiushui Yu,Zhiyong An, Ruining Yang, et al.Colour Tag Design of Robot Soccer Based on Computational Verb Theory[C]// Proceedings of 9th International Conference on Electronic Measurement and Instruments. Beijing:IEEE, 2009,4,433-437. [10]Liu Haibo, Li Weiwei, Dong Yujie. Algorithm for Real-Time Image Processing in the Robot Soccer[J]. Applied Mechanics and Materials, 2012,143: 737-741. [11]马爽. 基于视觉的足球仿人形机器人彩色目标及关键点的识别[D]. 长春:吉林大学, 2011. [12]尹仕斌,任永杰,邾继贵,等. 机器人视觉测量系统中的工具中心点快速修复技术[J]. 机器人,2013,35(6):736-743. [13]周明明.微型足球机器人视觉信息处理技术的研究[D]. 天津:天津大学,2004. [14]汤磊,王强. 基于K-均值聚类的足球机器人的新型图像分割方法[J].西华大学学报:自然科学版,2007,26 (5):11-14.2 实验结果及分析


3 结论
