不平衡飞轮的扰动特性
2014-08-31李太平姚煜中李霖圣程世祥
李太平,姚煜中,李霖圣,程世祥
(上海卫星装备研究所,上海200240)
不平衡飞轮的扰动特性
李太平,姚煜中,李霖圣,程世祥
(上海卫星装备研究所,上海200240)
高精度航天器对指向精度有极高的要求,飞轮是卫星姿态控制环节中不可或缺的执行部件,在研制和装备过程中,不可避免地具有微量的偏心或动不平衡,在姿态机动和稳定控制的过程中,飞轮的旋转会产生干扰力。将动静不平衡质量作为航天器的一部分,推导出完整航天器动力学姿态方程,进行动力学仿真,并根据完整的姿态动力学方程简化分析仿真结果。研究发现动静不平衡质量在飞轮高速转动时,对姿态均有影响,动不平衡质量对姿态的影响与安装位置关系很小,而静不平衡质量呈现线性关系,且两者对姿态的影响满足线性叠加。单轴转动时,指向精度的长周期变化只与飞轮的固有特性有关,与转速的大小无关。多轴转动时,姿态会振荡或发散,与初始相位有关;但对姿态的影响不满足单轴转动的叠加。
振动与波;动不平衡;静不平衡;转动;扰动;姿态
1 航天器姿态动力学方程
1.1 参考坐标系
研究含有动静不平衡质量的飞轮的航天器的动力学方程,需要建立五个坐标系:
惯性坐标系OeXiYiZi:Oe为地心,OeZi垂直于地球赤道面,其指向地球自转角速度的矢量的方向一致。OeXi在赤道平面内,指向赤道面与黄道面相交线,OeYi与OeXi和OeZi构成右手坐标系;航天器本体质心坐标系Obxbybzb:Ob为航天器本体质心,Obxb与飞行器的纵向对称轴重合,指向航天器的飞行速度方向,Obyb垂直于纵向对称面,Obzb与Obxb和Obyb构成右手坐标系;航天器复合质心坐标系Osxsyszs:Os为航天器系统的复合质心,本体质心Ob相对于系统复合质心Os的位置矢量为rb。Osxsyszs和Obxbybzb的三基矢方向始终一致。系统质心坐标系Osxsyszs相对于惯性坐标系的角速度为ω;飞轮形心坐标系Owxwywzw:Ow为飞轮的形心,Owzw与飞轮相对于卫星本体旋转的角速度矢量方向一致,Owxw与Owzw垂直,从飞轮的形心指向飞轮上某一定点,Owyw与Owxw和Owzw构成右手坐标系;飞轮质心坐标系Oixiyizi:Oi为飞轮的质心,Oixi、Oiyi、Oizi和Owxw、Owyw、Owzw平行。该质心相对于系统质心Os的位置矢量为ri。
1.2 姿态动力学方程
zi轴为系统的惯性轮的自旋轴,对应的单位矢量为fi,假设第i个轮子相对于系统质心坐标系以转速Ωi旋转,第i个惯性轮的质心坐标系Oixiyizi相对于系统质心坐标系Osxsyszs的方向余弦矩阵可用自旋轴的方位角λi、仰角φi和自旋相位角μi表示可得

在系统质心坐标系Osxsyszs下的矩阵表达式为

航天器本体部分关于其系统质心的视角动量为

其中fs是Osxsyszs的方向单位矢量,为卫星本体部分相对于其自身质心的惯性并矢,rb为卫星本体的质心相对于质心的位置矢量,mb是卫星本体部分的质量。
同样,第i个惯量轮关于系统质心的视角动量矢量为

则航天器系统关于系统质心的总角动量矢量为

将其代入经典欧拉方程,可得

其中Td为外界干扰力矩。
2 不平衡飞轮模型
2.1.1 不平衡飞轮构型
如图1所示,图中坐标系为飞轮的形心坐标系的基矢方向,其原点在飞轮的几何中心,z轴与自转轴重合,x轴与y轴在z轴的垂直平面内,并与z轴构成右手坐标系,三轴固连与飞轮的初始位置。

图1 不平衡飞轮模型
其中ms为静不平衡质量,相对于形心的位置矢量为rs,其在x方向的分量数为rs,md为动不平衡质量,相对于形心的位置矢量为±rd,其在x方向的分量数为± rd。 2不平衡飞轮的动静不平衡质量的相位差
飞轮转动时,静不平衡质量ms对卫星本体所产生的离心力沿x、y轴的分量表达式为
2.1.

两个动不平衡质量md旋转产生的力矩以及静不平衡质量所产生的离心力对系统质心产生的力矩和为

其中α0与β0为初始相位,Us=msrs,Ud=2mdrdh,rsc为静不平衡所产生的离心力对系统质心作用的力臂的臂长。所以
卫星的姿态只与作用于质心的干扰力矩有关,由式可得,当要使干扰力矩达到极值,则α0=β0,即初始相位角一致。所以,选择动静不平衡的初始相位角相等。
2.1.3 不平衡飞轮的转动惯量
根据平行轴定理,飞轮相对于其质心的转动惯量矩阵为(偏心距离为d,沿轮系的+x轴方向)

其中

表示飞轮的偏心距,为一标量。
如图2所示,平行于三轴的三个飞轮按照图示方式旋转,假设三个自旋相位角分别为 μx、μy、μz。其中,在与图示位置平行的时候,三轴的相位角为 μx=μy=μz=2kπ。则三个飞轮对应的三个坐标变换矩阵分别为
图2 三正交飞轮的安装示意图
3 飞轮扰动特性分析
3.1 卫星系统参数
为了研究动静不平衡质量在飞轮高速旋转的情况下,对卫星姿态的影响,本文选取一种已知型号卫星系统的质量参数和飞轮质量参数。
3.1.1 卫星本体参数
卫星本体转动惯量为diag(4 616,2 626,3 155) (kgm2),质量为1 500 kg。三正交飞轮的安装位置在卫星本体坐标系下的位置分别为(rx,0,0)、(0,ry,0)、(0,0,rz)(m)。其他未说明的单位均为国际单位制。
3.1.2 飞轮参数
表1 飞轮参数
3.2 整星动量矩守恒
(6)式为航天器姿态动力学方程,其将动静不平衡质量作为航天器本体的一部分来考虑,所以,航天器系统应该满足动量矩守恒。所以,对(6)式满足动量矩守恒进行验证。x-y-z三轴姿态角分别为φ-θ-ψ,所以,根据(6)式求解出的,代入到(5)式可得

航天器的动量矩在惯性系下守恒,所以,通过坐标变换,将式投影到惯性系下

其中 三轴转速分别为:Ωx≡10 Hz,Ωy≡8 Hz,Ωz≡9 Hz
如图3所示,在三轴飞轮存在转动,动静不平衡质量对姿态产生扰动,卫星本体三轴方向发生了转动。但是在图4所示惯性系下,航天器系统的动量矩的分量列阵没有发生变化,dH dt=0,验证了(6)式的正确性。
3.2.1 航天器姿态变化
ms和md均为小量,m≪M,飞轮的转速保持不变,卫星的姿态角、姿态角速度以及姿态角加速度均为小量,所以(6)式可简化为

式中

图3 本体系下三轴角速度
图4 惯性系下角动量
根据(14)式可求得其解析解

当Ωx=5 Hz时,根据(16)式,可知,θ的长周期模态的周期为

θ的长周期模态的幅值为

同时,由于(16)式中,其系数为-Al,所以,θ是先向负向振荡,再回到正向。与图5是一致的。
当存在静不平衡质量,Ωx=5 Hz时,根据(16)式,可知,ψ的长周期模态的周期为

ψ的长周期模态的幅值为

rx=ry=rz=0.2 m;Ωx分别取5 Hz、10 Hz、15 Hz。
可得(17)—(20)式的结果与图5一致,同时由(15)式和(16)式可知,长周期发散量与转速无关,与图5一致。
3.2.1.1 xyz轴转动发散

设三轴初始相位角分别为 μx(0)=α,μy(0)=β和μz(0)=γ。要是在三轴转动时,卫星姿态不发生发散,即(14)式右端s-1项的系数为0,整理并化简可得,即
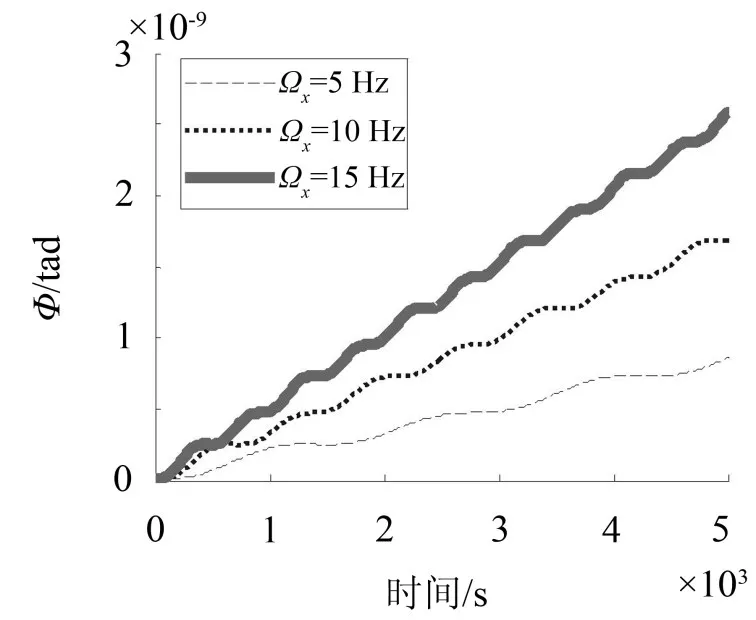
图5 x轴单轴转动的滚转角

图6 x轴单轴转动的俯仰角
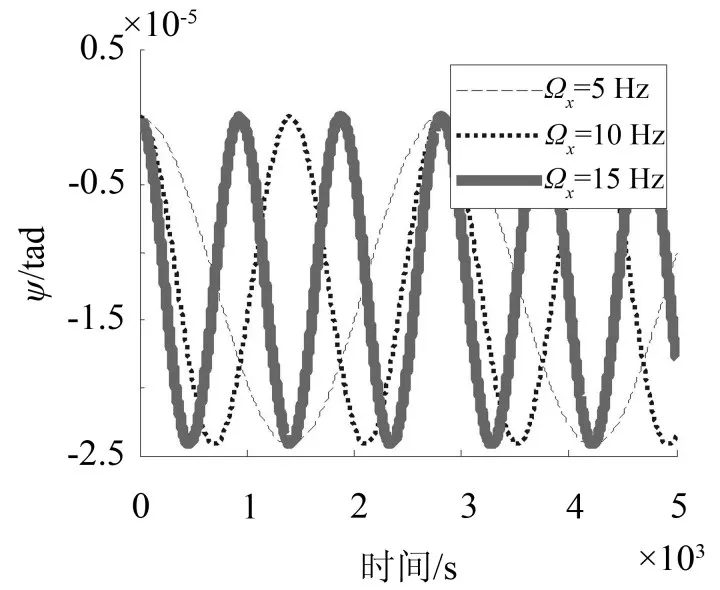
图7 x轴单轴转动的偏航角
由(21)式可得,单轴转动时a-1≡0,所以,单轴转动时,是不存在发散的。双轴转动时,未转动轴所对应的姿态角一定是振荡不发散的,而转动两轴姿态趋势是一致的。
3.2.1.2 x y z轴转动振荡Ωx=12 Hz;Ωy=15 Hz;Ωz=9 Hz;α=π/6、β=-0.084 8、γ=-π/4
Ωx、Ωy、Ωz、α、β、γ的参数满足(21)式,所以姿态角是振荡的,如图8所示。

图8 姿态角发散的x y z三轴转动
3.3 稳定性分析
将(13)式进行Laplace变换后,代入(14)式,求出系统的完整传递函数。因为函数的形式过于复杂,所以,对于系统的稳定性的分析,只写出ωx(s)中分母中存在(s2+Ωx2)的项,以此为例,其他项的规律与之一致,可得

其中ai、b、c在特定的工况下均为常数。所以可得:若a-1≠0,则φ(Ωx)必然存在一个时间t的一次项,是不稳定的发散的;若a-1=0、a0≠0,则φ(Ωx)将不存在时间t的一次项,但是存在常数项,姿态角是不以0为平衡位置振荡的。若a-1=0、a0=0,则φ(Ωx)将不存在时间t的一次项,也不存在常数项,姿态角是以0为平衡位置振荡的。
3.4 干扰力矩组合工况对姿态影响
因为干扰力矩的产生需要两个条件:(1)飞轮存在动静不平衡质量;(2)飞轮存在转动。
3.4.1 动静不平衡质量组合
根据式(13)可得

所以,动静不平衡质量对姿态的干扰,满足叠加原理。Ωx=Ωy=Ωz=15 Hz;如图10、11和图12所示,其中,real曲线为ms、md均存在的情况下,姿态角的实际变化规律;sum曲线表示为仅存在ms或md的两种情况下,三轴姿态角变化的和。

图10 动静不平衡质量的组合对滚转角的影响
在(12)式的U中,ms与ri存在一次项相乘,而md则没有,所以,静不平衡质量对姿态的影响与飞轮的安装位置有关,且成正比例,如图13、14和图15所示,三轴转速分别为:Ωx=12 Hz,Ωy=0,Ωz=0,rx=ry=rz分别取0.2 m、0.4 m和0.6 m。另外可得:动不平衡质量对姿态的影响,与飞轮的安装位置无关,如图16、17和图18所示,在安装位置发生变化的情况下,姿态角的发散情况无明显的变化。

图11 动静不平衡质量的组合对俯仰角的影响
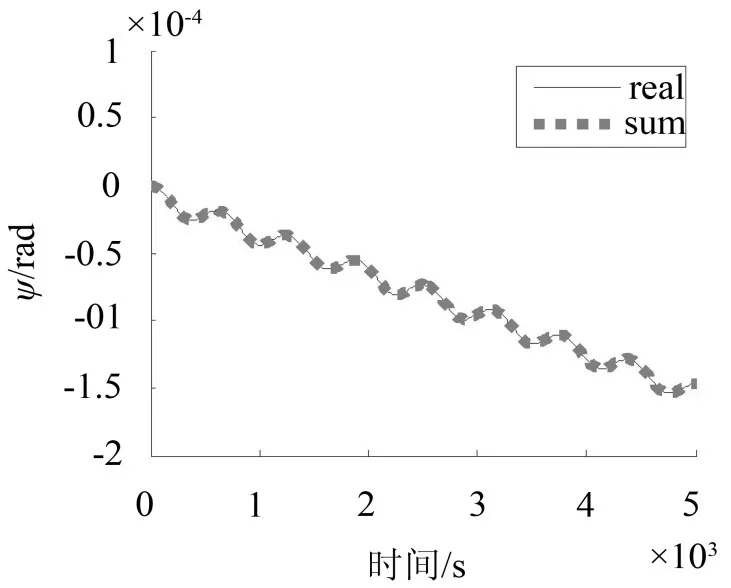
图12 动静不平衡质量的组合对偏航角的影响

图13 静不平衡质量随飞轮安装位置的改变对滚转角的影响

图14 静不平衡质量随飞轮

图15 静不平衡质量随飞轮安装位置的改变对偏航角的影响
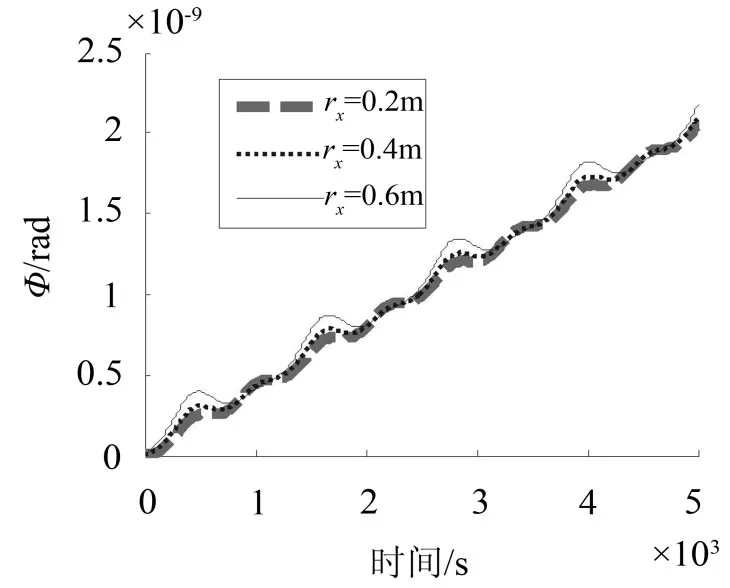
图16 动不平衡质量随飞轮安装位置的改变对滚转角的影响

图17 动不平衡质量随飞轮安装位置的改变对俯仰角的影响
3.4.2 速度组合
根据式(13)可得

但是,对于(14)式右端连乘的前两项的形式发生了改变,传递函数发生了改变,所以,速度并不满足叠加原理。如图19—图21所示:rx=ry=rz=0.2 m;real曲线表示在Ωx=Ωy=Ωz=15 Hz的情况下,三轴姿态角实际的变化;sum曲线表示Ωx=15 Hz、Ωy=Ωz=0 Hz;Ωy=15 Hz、Ωx=Ωz=0 Hz;Ωz=15 Hz、Ωx=Ωy=0 Hz;三种情况下,三轴姿态角变化的和。

图18 动不平衡质量随飞轮安装位置的改变对偏航角的影响

图19 三轴转动的组合对滚转角的影响
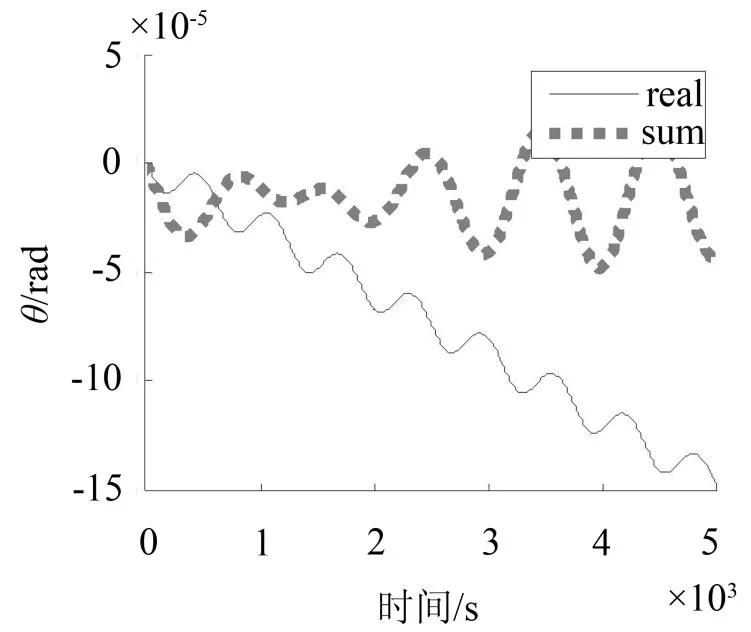
图20 三轴转动的组合对俯仰角的影响

图21 三轴转动的组合对偏航角的影响
4 结语
飞轮的不平衡质量在飞轮高速转动时,对高精度航天器的姿态有明显的影响,其中单轴转动时,对未转动的两个方向影响明显,但是姿态变化的幅值与转速无关,姿态变化的速度与转速相关。同时,动静不平衡质量对姿态的干扰是线性叠加的。且动不平衡质量对姿态的扰动,只与飞轮的特性有关,而静不平衡质量对姿态的扰动,与安装位置有关。多轴的转动有可能造成姿态的发散或振荡,与飞轮转动的初始相位有关。
[1]Wie B,Liu Qiang,Bauer F.Classical and robust H∞control redesign for the Hubble space telescope[C]∥AIAAGuidance,Navigation and Conference,1992-08.
[2]张振华,杨 雷,庞世伟.高精度航天器微振动力学环境分析[J].航天器环境工程,2009,26(6).
[3]Eyerman C E,Shea J F.A systems engineering approach to disturbanceminimizationforspacecraftutilizing controlled structures technology[R].MIT SERC Report# 2-90,1990.
[4]Bialke B.A compilation of reaction wheel induced spacecraft disturbances[C].Proceedings of the 20 th Annual American Astronautically Society Guidance and Control Conference,1997.
[5]徐 超,田 伟.卫星飞轮安装支架的粘弹性阻尼减振设计[J].噪声与振动控制,2010,3:1-4.
[6]李连军,戴金海.反作用轮系统内干扰建模与仿真分析[J].系统仿真学报,2005,17(8):1855-1858.
[7]De Weck O L.Integrated modeling and dynamics simulation for the next generation space telescope[D].Massachusetts Institute of Technology,1999.
Study on Disturbance Characteristics of Imbalance Flywheels
LI Tai-ping,YAO Yu-zhong,LI Lin-sheng,CHENG Shi-xiang
(Shanghai Institute of Spacecraft Equipment,Shanghai 200240,China)
High-precision spacecraft has very serious demands on pointing accuracy.The flywheel is an integral part of the execution units for satellite attitude control.In the research and development process,small eccentricity or dynamic imbalance is unavoidable.So,in the attitude maneuver and stability control process,rotation of the flywheel can cause interference forces.In this paper,taking the imbalance mass as a part of the spacecraft,the spacecraft attitude dynamic equations are conducted and the simulation is carried out.The simulation results are analyzed and illustrated.It is found that when the flywheel is rotating at high speed,the attitude of the spacecraft is essentially independent of the dynamic unbalance mass and its installation location,while it is linearly related to the static unbalance mass.When a single flywheel rotates,the long-period pointing accuracy depends on the inherent characteristics of the flywheel only,instead of its rotating speed.While multi-flywheels rotate,the attitude will oscillate or diverge,depending on the initial phase.Furthermore,effect of the multi-flywheels rotating does not mean the superposition of the influences of single-flywheel’s rotating.
vibration and wave;dynamic imbalance mass;static imbalance mass;rotation;disturbance;attitude
1006-1355(2014)03-0034-04
V414.1
A
10.3969/j.issn.1006-1335.2014.03.008
1990年,“哈勃”发射升空进入轨道以后,由于帆板的热致振动的频率与“哈勃”本体的基频一致,结构产生了共振,“哈勃”的指向稳定度从设计的0.007″变到了0.1″,极大地降低了指向精度[1,2]。但是人类对航天器的精度要求却越来越高。美国的锁眼(KH-Key Hole)系列卫星,从KH-1到KH-13,其分辨率从12 m提高到0.05 m。但是飞轮作为航天器的姿态控制机构,其动静不平衡特性在高速旋转的情况下,会极大地影响航天器的高精度。上世纪90年代,Eyerman和Shea等人对航天器的在轨微扰动进行了比较全面地总结,在该论文中,他们认为反作用飞轮和航天器的在轨运行热致振动的影响最大[3]。同时,Bialke发表了一系列的论文,对反作用飞轮扰动的扰动源、实验以及数学建模等做出了全面地阐述[4]。国内在这方面也做了大量的研究[5],但是这些建模都是将飞轮的扰动作为谐波[6,7]考虑,通过实验和Fourier变换获得谐波数和谐波因子,缺乏理论依据。基于此,本文将推导含有动静不平衡质量的航天器的精确姿态动力学方程,并以此为基础,分析飞轮的不平衡特性对航天器姿态的影响以及影响程度。
2013-06-28
李太平(1989-),男,河南内乡人,硕士,从事结构动力学试验和研究,微振动对航天器姿态的影响。
E-mail:litaiping168@126.com
