验证牛顿第二定律实验的系统误差分析和优化设计
2014-08-27
(江苏省宜兴第一中学,江苏 宜兴 214206)
“探究加速度与力、质量的关系”实验是中学物理中极其重要的学生实验之一,也是历年高考的热点实验.从近几年各地高考卷看,对其的考查大多为改进型实验,需要学生对本实验的系统误差有较清晰的认识,同时也考查学生在新情景下的实验探究能力.针对这一情况,笔者将从消除测量力的系统误差角度入手,探讨三种改进型实验方案,赏析消除系统误差的方法和思想.
1 系统误差分析
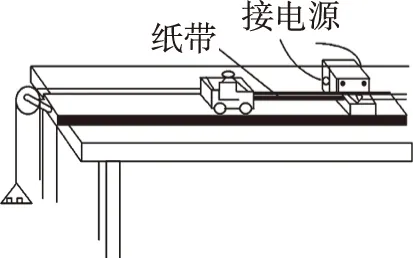
图1
2 优化设计
方案1:改近似为准确
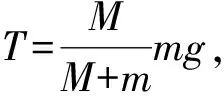
从上文分析可知,误差的原因是没有测出真实的绳上拉力T,而是用mg近似替代T.由此,最常规的改进思路呼之欲出,即利用有关测力装置准确测量出绳上拉力T,从而达到消除误差的目的.
例1 为了探究加速度与力的关系,利用气垫导轨和DIS系统等装置进行实验,如图2.两光电门与数字计时器相连.当滑行器通过光电门时,光束被遮挡的时间Δt1、Δt2都可以被测量并记录.滑行器连同上面固定的一条形挡光片的总质量为M,挡光片宽度为D,光电门间距离为x,牵引砝码的质量为m.回答下列问题:
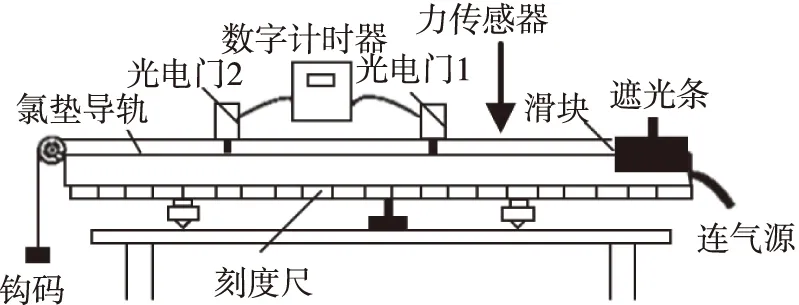
图2
(1)实验开始应先调节气垫导轨下面的螺钉,使气垫导轨水平,在不增加其他仪器的情况下,如何判定调节是否到位?
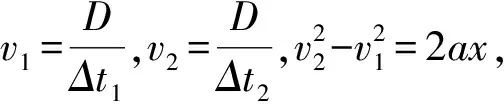
(2)在此实验中,需要测得每一个牵引力对应的加速度,请写出此加速度的表达式(用Δt1、Δt2、D、x表示).
(3)实验中,是否应该满足M≫m这样的条件?
解析:(1)如果气垫导轨水平,则不挂砝码时,M应能在任意位置静止不动,或推动M后能使M匀速运动,即数字计时器记录每一个光电门的光束被挡的时间Δt都相等;
(3)力传感器测出的力就是绳对小车的真实拉力,不存在系统误差,与m、M的大小无关.
点评:本例利用相应的测力装置测出真实拉力,可消除系统误差;利用气垫导轨消除摩擦力,从而使绳上的拉力就是小车所受的合力,比原有实验平衡摩擦力的方法简单,更具操作性.
方案2:化部分为整体
方案1是针对原实验中“拉力不能准确获得”而设计的,同时我们也可看到原始实验的对象仅是小车一个物体,我们还可以通过改变研究对象来达到消除误差的目的.
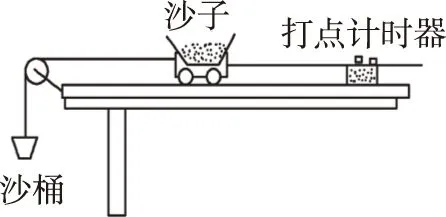
图3
例2 利用如图3所示装置探究物体加速度与力、质量关系.小车上固定一个盒子,盒子内盛有沙子.沙桶的总质量(包括桶以及桶内沙子质量)记为m,小车的总质量(包括车、盒子及盒内沙子质量)记为M,实验时已平衡了摩擦力.
(1)验证在质量不变的情况下,加速度与合外力成正比:从盒子中取出一些沙子,装入沙桶中,称量并记录沙桶的总重力mg,将该力视为合外力F,对应的加速度a则从打下的纸带中计算得出.多次改变合外力F的大小,每次都会得到一个相应的加速度.本次实验中,桶内的沙子取自小车中,故系统的总质量不变.以合外力F为横轴,以加速度a为纵轴,画出a-F图像,图像是一条过原点的直线.①a-F图像斜率的物理意义?②本次实验中,是否应该满足M≫m这样的条件?为什么?
(2)验证在合外力不变的情况下,加速度与质量成反比:保持桶内沙子质量m不变,在盒子内添加或去掉一些沙子,验证加速度与质量的关系.本次实验中,桶内的沙子总质量不变,故系统所受的合外力不变.用图像法处理数据时,以加速度a为纵横,应该以倒数为横轴.
点评:本题利用相同的器材,变更研究对象,巧妙的将系统误差化解于无形中,以该方案为蓝本派生出来的一系列实验能够很好的考查学生对实验原理的理解和新情景中的分析能力、迁移能力.
方案3:变多体为单体
在常规实验中,产生加速度的力由研究对象(小车)以外的物体提供,因此要消除误差需得到绳上的真实拉力,那么实验中提供加速度的力能否由研究对象自身提供呢?针对这一点,笔者考虑了以下方案.
例3 采用如图4所示的装置,探究加速度与质量的关系.提供的器材有:气垫导轨、滑块(总质量为m,左端装有遮光板)、光电门(配接数字计时器)、米尺、铁架台.实验中,测出导轨顶端A与光电门所在位置B的距离为L,导轨顶端距水平面的高度为h.
(1)用游标卡尺测量遮光板的宽度为d,接通气源,让滑块从A端由静止开始向下运动,读出遮光板通过光电门的时间为t1,若遮光板的宽度用d表示,则滑块运动到B点时的速度v1=,下滑过程的加速度a1=.
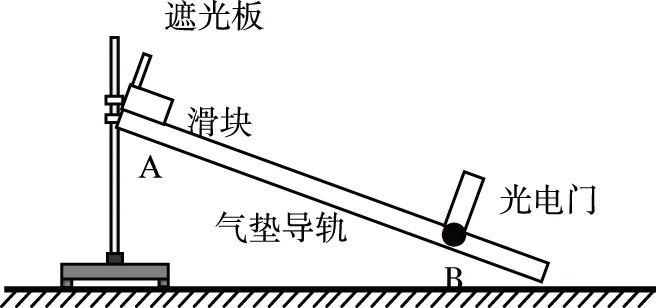
图4
本方案是对原实验的一次改进,主要亮点在于通过改变滑块质量和导轨顶端高度,保持滑块受到的合外力不变,其目的是为了消除系统误差.学生初次接触利用该方案设计的习题时,可能感觉难以下手,这就要求学生能与头脑中的“原型”进行比对,寻求问题的突破口.本例既考查了原实验,又考查了学生在新情景下的分析、解决问题的能力.
