蜗轮蜗杆试验台测控系统设计
2014-08-26白国振
刘 淼,白国振
(上海理工大学机械工程学院,上海 200093)
0 引言
蜗轮蜗杆传动是目前机械上常使用的传动方式之一,用以传递空间交错的两轴之间的动力和运动。具有结构紧凑、传动比大、传动平稳和噪声小等优点,获得了广泛应用。但由于它的传动效率较低,且啮合处有较大的滑动速度,会产生较严重的摩擦磨损,引起发热,使润滑情况恶化,影响蜗轮蜗杆的使用寿命。因此,在产品投入使用之前,需要经过大量的实验确定其疲劳寿命。
1 蜗轮蜗杆试验台
蜗轮蜗杆试验台结构如图1所示。第1部分是与蜗杆连接的永磁同步电机1和扭矩传感器,通过设定电机的转速来控制蜗轮蜗杆的转速;扭矩传感器用来测定蜗杆端(输入端)的扭矩。第2部分是与蜗轮连接的交流异步电机2和扭矩传感器,电机2作为模拟负载给蜗轮加载不同的扭矩;扭矩传感器用来测定蜗轮端(加载端)的扭矩。第3部分是支架和连接件,支架用来固定支撑电机以及传感器,联轴器用来传递运动和转矩[1-2]。

图1 蜗轮蜗杆试验台结构
2 西门子SIMOTION
西门子运动控制系统SIMOTION作为新型的控制系统,集运动控制、逻辑控制与工艺控制功能于一身,能够最大程度简化工程系统的开发与调试时间,同时还能保证较高的循环率和最高的产品质量。模块化的设计顺应了模块化机器概念的趋势,使用PROFIBUS和PROFINET实现模块之间的通信,使SIMOTION运动控制系统具有更大的灵活性[3]。SIMOTION是一种简单,灵活的控制系统,具有如下优点:降低工程造价,提高机械性能;独立部件之间的接口对时间响应的要求大为降低;整个机器具有简单、统一、明晰的编程和诊断过程。
SIMOTION系统有硬件平台、工程开发系统(SCOUT)以及实时软件模块3个组成部分:
a.硬件平台。硬件平台是SIMOTION运动控制系统的基础。SIMOTION有3种硬件平台,即基于控制器的SIMOTION C、基于PC的SIMOTION P和基于驱动的SIMOTION D。每种硬件平台都具有针对特定应用领域的优势。而不同的硬件平台也可组合在一起用于处理复杂的控制任务,这是SIMOTION的一个独特优点。本设计采用的SIMOTION D,是集成在新的SINAMICS S120多轴驱动系统的控制模块上,特别适合紧凑和模块化设计。
b.工程开发系统。SCOUT是用于调试SIMOTION的工具软件,可以完成运动控制、逻辑控制与工艺控制的工程开发问题以及驱动器的组态与调试,并且还能够实现电机动态特性的调试、故障诊断等功能。
c.实时软件模块。这些模块提供了众多的运动控制以及工艺控制功能。用户可以根据需要灵活地选择合适的工艺对象,以满足机器所需要的功能。
3 系统硬件组成
根据蜗轮蜗杆试验台的功能需求,选择西门子SIMOTION D425控制器以及SINAMICS S120驱动器功率部分,确定试验台的控制方案如图2所示。

图2 控制方案
系统主要包括以下几部分:
a.控制模块(D425)。作为整个驱动系统的大脑,负责控制和协调整个驱动系统中的模块。
b.电源模块。选用智能电源模块(SLM),作用是将三相交流电转变成直流电,供给各电机模块,并能将直流电回馈到电网,但直流母线电压不能调节。
c.电机模块(功率模块)。即逆变单元,它将直流电逆变成三相交流电。作为伺服电机的供电电源;电机模块A,B分别作为输入端和加载端伺服电机的供电电源。
d.输入端、加载端电机。选择西门子伺服电机。
e.输入端、加载端扭矩传感器。选择Kistler公司的扭矩传感器[4]。
SIMOTION采用一体化的集成连接方式,控制器D425和驱动器SINAMICS之间采用Drive-CLIQ高速通讯方式,通讯速率可达到适合于数据序列增长(衰减)速度过慢的场合。
4 系统软件设计
4.1 蜗轮蜗杆试验台功能需求
针对蜗轮蜗杆的试验项目及内容,对蜗轮蜗杆试验台提出了以下控制要求:
a.要求实现输入端伺服电机给定位置(扭矩)曲线,同时加载端伺服电机给定扭矩(位置)曲线进行同步运动。输入端电机和加载端电机根据给定曲线运行,实现不同速度下的功能实验。
b.能通过PC对数据进行同步采集,包括输入端扭矩、转角和转速,加载端扭矩、转角和转速。
c.能够对上述参数自由设置监控极限,从而在预设的试样件破坏时,试验运行会自动终止并保存当前记录数据。
4.2 开发平台总体设计
系统软件开发平台采用高可靠性的研华工业计算机作为上位机,下位机采用西门子SIMOTION D425运动控制器。上位机软件开发环境采用基于Windows的LabVIEW图形化程序设计软件,下位机由西门子SIMOTION SCOUT软件控制,上位机和下位机的软件之间采用OPC通讯协议。
上下位机之间对实时采集到的数据进行实时通讯,但对控制信号则采用一次性中断通讯,这样可以实现实时采集数据实时显示,控制信号按照需要进行通讯。
系统通过SCOUT软件将轴配置为标准+力轴的模式,这样可通过指令来改变反馈为电机编码器反馈或扭矩传感器反馈,从而灵活地切换电机为位置闭环控制模式或扭矩闭环控制模式[5]。软件里包含速度环和电流环2个输出设定点,都为PI控制,并将输出设定点设定在速度环前面。整个控制流程如图3所示。

图3 控制流程
试验台主要使用SCOUT软件的CAM曲线设定和控制程序编辑功能。SIMOTION工艺对象的同步运行功能,提供了使用“控制工程”替代“刚性机械连接”的选项。CAM同步时,主轴与从轴的速度或位置关系可以是非线性的,这样能够减少速度变化对机械设备的冲击。SCOUT软件自带的凸轮文本辑器操作简单,可以根据不同的实验要求设定试验扭矩曲线和位置曲线。此外,CamTool还可以为SCOUT提供全图形化的凸轮编辑及优化工具。
控制程序包括运动控制、逻辑控制以及工艺控制3种。MCC(motion control chart)是图形化的编程语言,适用于编写顺序执行的程序,主要用其编写运动控制的程序。程序也可以用LAD及FBD编程,梯形图直观易懂、容易掌握,特别适用于边沿触发、二进制数据处理等逻辑控制。ST语言是基于文本的类似于Pascal的高级编程语言,对于复杂的逻辑控制、数据处理及包含数学算法的运动控制,可用ST编程语言进行编程。这3种编程方式均集成在SIMOTION SCOUT软件中。
系统的软件编程主要包括计算程序、运动控制程序。计算部分程序是由ST语言编写来实现有效控制,主要包括电源模块上电的控制,凸轮曲线的读取及计算等。运动控制部分的程序是用MCC语言进行编程,主要包括电机的使能,凸轮曲线的同步运行,故障诊断报警,轴的停止等。
LabVIEW通过数据采集卡来采集所需的各路数据信号,数据采集系统如图4所示。
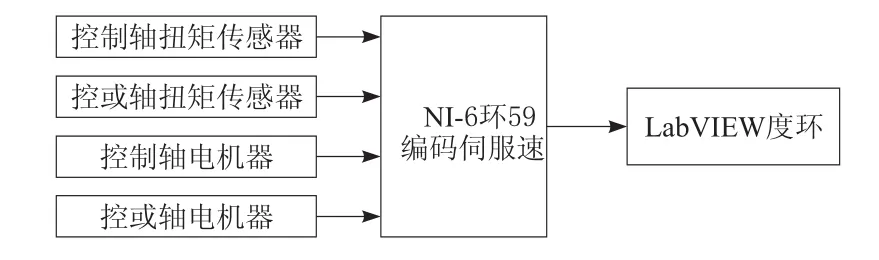
图4 数据采集系统
上位机使用LabVIEW编写的软件,通过OPC与D425进行通信和数据交换,来实现上位机对试验台的控制功能,试验曲线的设定和传输,以及各路数据信号的同步采集、处理和显示输出[6]。
输入端和输出端的2个扭矩传感器所采集的实时扭矩信号和编码器采集的位置信号,由NI-PCI6259数据采集卡以模拟量信号采集,通过上位机的Lab-VIEW软件将实时数据以曲线形式显示出来。
5 试验台测控实验
使用编写的LabVIEW程序对蜗轮蜗杆试验台进行测试试验。通过上位机控制面板,进行试验参数的配置以及加载曲线的设定和传输,设定了位置和扭矩同步曲线。其中,位置曲线是以某恒定速度到达正向目标位置,然后以同样速度反向到达反向目标位置,最后回到初始位置;加载曲线是力的方向与速度相反的分段曲线。
实验开始后,上位机通过采集卡同步采集实际位置曲线和扭矩曲线信号并显示。测得的实际位置曲线与设定位置曲线一致,实际采集到扭矩曲线波动范围为±2N·m,说明了所设计的试验台测控系统,能够对设定的扭矩和位置曲线进行同步加载并进行实时数据的采集,基本满足了试验台系统的实验要求,设计方案是可行的。
6 结束语
利用西门子SIMOTION D,设计了蜗轮蜗杆试验台测控系统。通过试验台测控实验表明,测控系统能够满足蜗轮蜗杆试验台的实验要求,且可靠性高,达到预期目标,运行效果好。
[1]廖抒华,王金波,张宝霞,等.转向系统试验台转向阻力模拟研究现状及发展[J].上海汽车,2009(10):33-35.
[2]李 芹,刘 平,何代华,等.蜗轮蜗杆试验台疲劳测试及控制系统仿真[J].计算机测量与控制,2012,20(12):3154-3157.
[3]周 全,白国振,熊 友,等.基于SIMOTION D425运动控制系统的CAM 曲线[J].电子科技,2011,24(10):96-98.
[4]刘 斌.基于西门子840D的数控系统教研机的构建与应用[J].制造技术与机床,2012(11):152-153.
[5]梁伟强.电动助力转向试验台开发[J].机电工程技术,2008,37(7):68-70.
[6]翟邵春,闵新和,黄志坚,等.汽车电动助力转向装置试验台测控系统的研究与开发[J].机床与液压,2008,36(12):141-143.
