舰载机甲板调运过程避碰路径规划研究
2014-08-26张智林圣琳夏桂华朱齐丹
张智,林圣琳,夏桂华,朱齐丹
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
舰载机在航母甲板上的调运策略直接影响了甲板上多机作业的效率,从而影响了航母上舰载机的综合出动回收能力,最终将影响到航母的综合作战能力。而随着计算机技术的发展,国外航母平台越来越多地依赖计算机仿真技术对舰载机在航母甲板上的布列及调运策略进行研究[1],例如近期由麻省理工学院人类和自动化实验室研制的名为甲板作业活动过程规划者(DCAP)的人机交互系统较真实地再现了舰载机甲板作业调度过程[2]。舰载机在甲板上调运过程中的路径选择,可以看作是平面移动机器人避碰路径规划问题,但不同于普通的移动机器人路径规划,舰载机形状复杂且经常需要在某一较小区域内排列众多飞机,因此往往需要在障碍复杂、目标拥挤的情况下进行路径规划[3]。
关于移动机器人路径规划问题研究的文献较多,如行为动力学方法[4〛、人工势场法[5-6]、遗传算法[7]、模糊逻辑算法[8]、启发式搜索法[9]、粒子群算法[10]等,但为了简化避碰过程,多数将机器人简化为栅格点或圆形等简单形状处理,而该方法无法适用于舰载机调运过程,舰载机不仅形状复杂,且在机翼收起状态下机身呈细长形状,用其外接圆简化处理将会损失大量有效空间,无法在拥挤的障碍环境下找到有效路径。
本文设计了一种适用于复杂形状目标及障碍环境的局部避碰路径规划方法;引入行为动力学实现舰载机局部避碰路径规划;并针对性改进了避障策略和奔向目标策略;推导了航向角动力学与速度动力学解耦的避碰形式,使得路径规划算法能适用于舰载机多种任务模式的需求。
1 舰载机的形状描述及距离检测
1.1 舰载机的形状描述
本文采用舰载机形状如图1所示。

图1 舰载机形状描述Fig.1 Aircraft shape description

图2 舰载机及多边形形状描述Fig.2 Aircraft and polygon description
在甲板调运过程中,根据作业任务的需要,舰载机可能会经常在图1的2种状态间切换,因此本文的路径规划方法将同时针对2种形状开展研究,为简化计算量、减小局部极小问题出现概率,在不损失太多有效空间的前提下,引入多边形线段集对飞机形状进行描述,图2为描述后的飞机形状。
1.2 线段之间距离计算
舰载机外形已被描述成线段集,因此欲实现舰载机之间的碰撞检测和距离计算,需先推导任意2条线段之间的最短距离计算方法。
如图3,两线段相对位置关系包括平行、交叉或其他,但无论相对位置关系如何,线段最短距离均在以下几种情况中产生:某一线段端点到另一线段所在直线距离;某一线段端点到另一线段端点间距离;距离为0(交叉情况)。

图3 线段最短距离检测Fig.3 The minimum distance detection of lines
设线段1的端点为P1(xP1,yP1)、P2(xP2,yP2),线段2的端点为P3(xP3,yP3)、P4(xP4,yP4),可按如下步骤计算线段最短距离:
1)判断两条线段是否交叉。
2条线段所在直线方程如下:

联立以上方程可求解交点,然后判断交点是否在任意一条线段上即可,判断方法可通过判断交点的x或y坐标值是否在某线段两端点坐标值之间。
2)计算线段端点距离。
分别计算距离dP1_P3、dP1_P4、dP2_P3、dP2_P4,以dP1_P3为例:

3)计算端点到另一线段所在直线的距离。
此处仍需分别计算4个端点对应的距离,此外,还需计算点到直线的垂足是否在目标线段两端点之间。以P1点到线段2所在直线距离dP1_L2为例:

垂足点PP1⊥L2(xP1⊥L2,yP1⊥L2)坐标计算公式如下:


求得垂足坐标后,可按第1)步方法判断其是否在线段上,在线段上则判为有效距离。
4)若线段交叉则最短距离为0,否则在2)步计算的4个距离和3)步计算的有效距离中取最小值。
1.3 舰载机之间的碰撞检测及距离计算
根据上文推导的线段之间的最短距离计算方法,进一步计算舰载机间最短距离。设舰载机1由M条边组成,舰载机2由N条边组成,则两飞机间最短距离计算如下:

式中:d(l1i,l2j)表示第一个飞机的第i条线段到第2个飞机的第j条线段间最短距离,计算方法已在1.2节给出。

图4 舰载机距离计算Fig.4 The distance calculation of the aircrafts
而检测两舰载机是否碰撞,只需判断其最小距离是否等于0即可,实际使用过程中可留有一定安全余量,即设定一距离阈值dCol,当dP1_2<dCol时,即视为碰撞。
图4描述了舰载机之间的碰撞检测图例,图中标注了某架飞机与其他各飞机间最短距离计算结果。(甲板上除舰载机之外还有其他设备,均为舰载机路径规划过程中需要规避的障碍,但各设备也同样可用多边形线段集来描述,与舰载机间避碰处理方法相同,在不失一般性的前提下,文中仅用不同位置处的舰载机来代表障碍)。
2 舰载机避碰路径规划
2.1 行为动力学基本原理
智能机器人行为动力学可总结为[11-13]:研究机器人在动态未知环境中行为的发生与演化、分析与设计、预测与控制以及与环境的关系的科学,主要反映控制系统特性以及与环境的相互作用规律。
舰载机路径规划的总体行为由奔向目标行为和避障行为组成。而奔向目标行为模式和避障行为模式组成了舰载机的路径规划行为模式。动态环境中的路径规划,两种基本行为模式是随着环境的变化而变化且相互制约,最终实现路径规划任务。基本的行为模式可以通过行为变量的运动微分方程来实现,即

式中:φ、v称为行为变量,v是舰载机的移动速度,这里指舰载机的甲板运行速度;φ是舰载机的航向角;env表示环境;f和g构成的矢量场由舰载机的任务约束来决定。这样,舰载机的路径规划就变成了这些行为变量的时间历程,也就是行为的动力演变。在每一个规划周期,可通过航向角φ和速度v的时间历程来描述舰载机的运动轨迹。
2.2 舰载机的航向角行为动力学模型
2.2.1 奔向目标行为
如图5所示的舰载机与障碍物、目标点示意图。φ为速度v和x轴正方向的夹角。

图5 舰载机及环境Fig.5 Aircraft and the environment
将舰载机的航向角奔向目标行为动力学模型用微分方程表示为

式中:ψgoal表示目标点相对于舰载机当前位置的方位,λgoal,φ>0表示吸引强度。容易看出φ=ψgoal是该非线性方程的一个不动点,将其在不动点处线性化,得到≈-λgoal,φφ ,显然 φ 在不动点邻域内近似指数渐进收敛,ψgoal是一个稳定的不动点,目标点形成一个吸引子。
2.2.2 避障行为
对于舰载机的避障模式下的行为状态,用以下微分方程来表示[15]

式中:λobs,φ>0是排斥强度;dobs表示舰载机用于距离检测的外轮廓多边形与障碍物的最小距离;cobs是排斥力随距离增加而衰减的系数;ψobs表示障碍物相对于舰载机当前位置的方位角度,由舰载机本体坐标系中测量得出;σ表示舰载机避障排斥角度范围。由于,ψobs为一个不稳定的不动点,障碍物形成一个排斥子。
2.2.3 舰载机航向角整体动力学模型
航向角行为模式由奔向目标行为模式和避障行为模式共同决定。因此,舰载机整体航向角行为动力学模型为:

式中:i为多障碍物环境下障碍物的序号;wgoal,φ、wobs,φ为航向角奔向目标行为和避障行为的权值系数,决定了舰载机在环境中的奔向目标行为和避障行为所占权重,体现了两者的竞争关系。
2.3 舰载机的速度行为动力学模型
2.3.1 奔向目标行为
舰载机在甲板运动的期望速度必须小于其系统所制约的最大速度vgoal,max,同时必须尽可能大,使舰载机能尽快到达目标点。但为了保证精度,当舰载机趋近目标时,速度应随着与目标点的接近而减小。因此,奔向目标行为的期望速度为

式中:参数kgoal>0,dgoal为舰载机到目标点的距离。速度动力学模型为

式中:λgoal,v表示吸引子的强度。为确保系统保持在吸引子附近,即满足,它的相关参数应该满足

2.3.2 避障行为
舰载机的速度应该随着与障碍物的距离减小而减小。同时为逃离局部极小点,速度必须大于最小速度vmin,所以避障行为的整体期望速度为

式中:参数kobs>0,dobs表示舰载机到障碍物的最小距离。则避障行为的速度动力学模型为

式中:参数-λobs,v表示排斥子的强度。同样,为确保系统远离排斥子,即,避障行为的相关参数必须满足

从以上的设计可以看出,与常规的舰载机线速度和角速度的设定值为常数的情况相比,基于速度行为动力学系统的设计能使舰载机根据外界环境动态地改变方向和速度[14-17]。
2.4 路径规划仿真
基于VC++6.0软件开发仿真软件,并分别针对舰载机展翼情况和收翼情况进行仿真验证,舰载机有效避开障碍,达到了期望位置。

图6 舰载机路径规划仿真结果Fig.6 The results of aircraft path planning simulation
3 路径规划方法改进
如图7,舰载机复杂的形状特点,使得传统的行为动力学方法应用于其避碰路径规划过程中的障碍情况较复杂时,往往更容易规划失败。本节将针对问题特点,对行为动力学的避障行为策略、奔向目标行为策略等多处进行改进,使其更适用于舰载机形状特点和舰载机调运任务的需求,提高算法在复杂障碍中的适应能力。

图7 舰载机路径规划中的局部极小问题Fig.7 The local minima problem of path planning
3.1 航向角避障行为策略的改进
如图8,引起舰载机路径规划失败的一个主要原因是运动目标与障碍的多边形表示引入许多“尖角”(尤其是舰载机前端顶点),导致避碰难度增加,本节将对航向角避碰行为策略进行改进,通过提高舰载机对其正前方附近障碍反应的灵敏度来提高避碰能力。

图8 前端障碍的避碰情况Fig.8 The front-obstacle avoidance

式中:在姿态角偏差绝对值小于阈值ζobs时采用符号函数,令其取值在偏离0时快速上升,当姿态角偏差绝对值大于阈值ξobs仍采用斜坡函数,而位于ζobs与ξobs之间时,利用三次多项式函数保证曲线的平滑过渡。
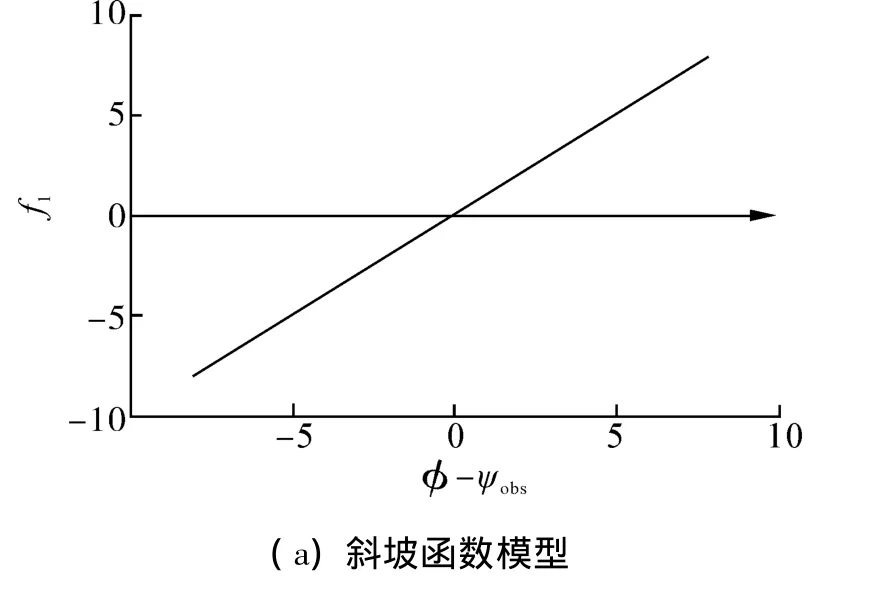

图9 航向角避障动力学仿真模型Fig.9 Dynamics simulation model of the course angle
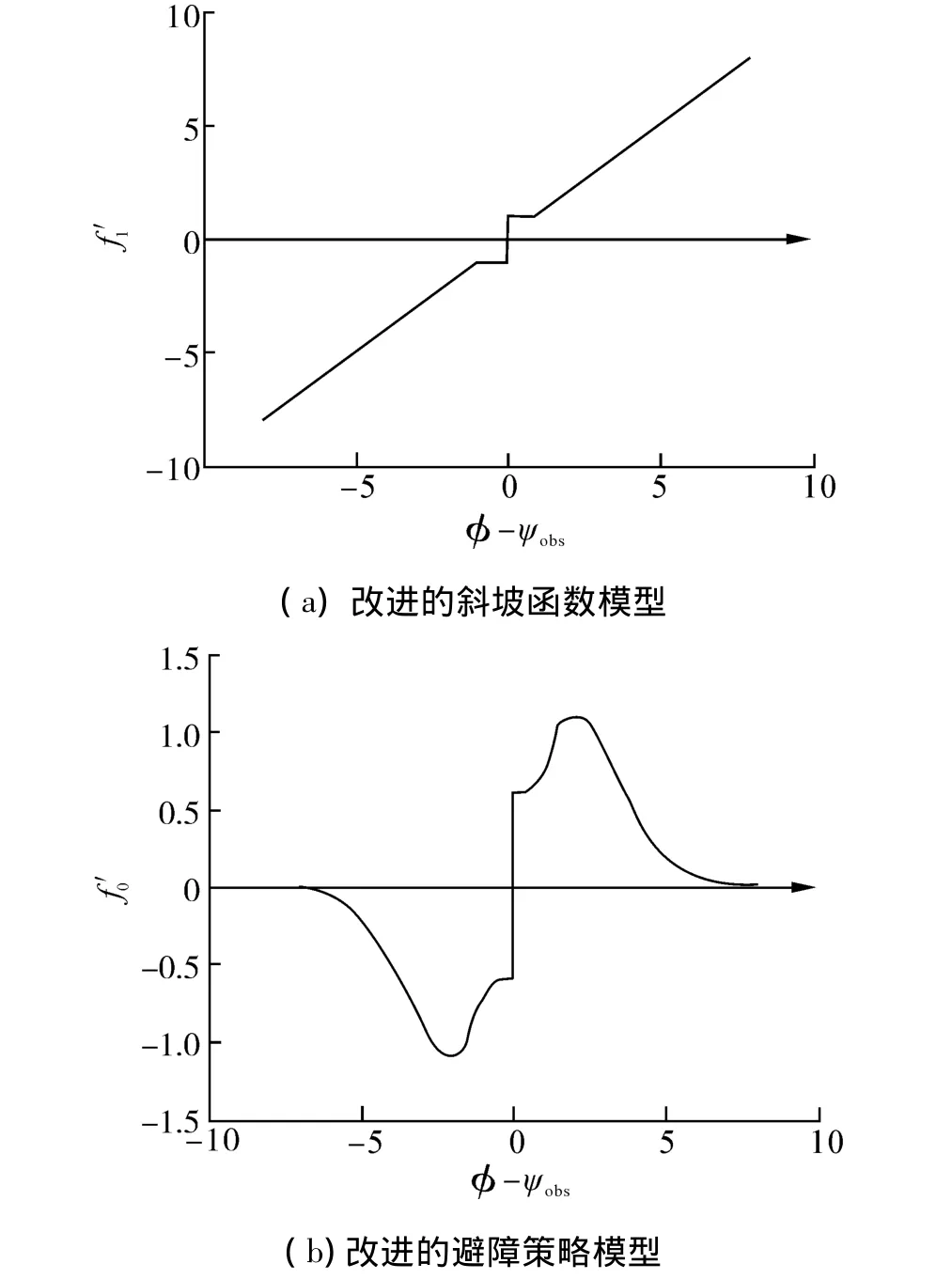
图10 改进的航向角避障动力学仿真模型Fig.10 Dynamics simulation model of the improved course angle
替换后的分段函数如图10(本文取ζobs=0.5、ξobs=1.5、μobs,φ=0.4)。将替换后的函数项代入式(10),得到新的斥力计算公式:

3.2 航向角奔向目标行为策略的改进
奔向目标行为的作用是引导舰载机不断朝向目标方向运动,通常是计算运动质心与期望点的相对位置偏差,控制舰载机的质心位置最终达到预定点。当舰载机进行连续甲板作业时,需要在多个目标点之间连续运动,在仿真分析舰载机更加复杂的作业过程时,往往需要全局路径决策与局部避碰路径规划方法结合。而当期望路径点列描绘的是舰载机的期望质心轨迹的时候,如图11(a),舰载机细长的尖端顶点将会产生更大的波动幅度,给避碰造成困难。

图11 不同跟踪模式下的路径规划Fig.11 The path planning of different tracking modes
本节将奔向目标行为策略改进,将期望点设置在舰载机前端顶点,如图11(b),此时舰载机的运动过程将相对平稳,从而提高避碰路径规划成功率。
设舰载机前端顶点在其本体坐标系下的坐标为{xJB,yJB},变换到世界坐标系:

式中:(xJG,yJG)为变换后的顶点坐标,通过该坐标与目标点相对位置关系来计算航向角奔向目标行为模型:

3.3 航向角及速度动力学的解耦处理
行为动力学中的航向角动力学和速度动力学在目标运动过程中共同决定了避碰策略。但舰载机在甲板作业过程中受到任务约束,其运动速度需根据任务需求进行调整,因此本节将速度动力学和航向角动力学进行解耦处理,将避碰策略全部移至航向角行为动力学中,速度作为自由设定量。
设舰载机真实设定速度为vset,而原行为动力学方法计算出的速度为v,角速度为,在此推导舰载机新的角速度,使得新的角速度与设定速度所决定的舰载机运动轨迹形状与原行为动力学计算结果对应轨迹形状一致,只需要令其具有相同的转弯半径R即可,根据运动学约束有

令R与Rnew相等,可以得出:

3.4 改进算法后路径规划仿真
采用改进后的避碰路径规划策略进行仿真,结果如图12所示,图中分别针对舰载机不同的初始位置、机翼状态以及不同的期望速度,(a)为2.0 m/s,(b)为3.5 m/s,(c)为5.0 m/s进行了仿真,舰载机均有效避开了复杂的障碍环境,到达了期望位置。由此可见,改进后的避碰路径规划方法很好地解决了舰载机甲板调运过程避碰路径规划问题。
图12 改进后路径规划结果Fig.12 The results of improved path planning
4 结束语
本文针对舰载机甲板调运过程,研究了一种适用于复杂形状目标的避碰路径规划方法,并对行为动力学进行了多处改进。结果表明:改进后的方法不仅能很好地解决舰载机在复杂甲板环境下的避碰路径规划问题,同时也为其他类似的复杂形状目标路径规划问题的分析提供了参考和借鉴。此外,舰载机在甲板上的作业过程是一个非常复杂的多目标综合规划问题,将在后续工作中针对多机路径协调、甲板作业交通规则、避碰失效处理等一系列问题继续深入研究。
[1]郑茂,黄胜.超级航母的超级甲板[J].舰船知识,2013,2(3):48-53.ZHENG Mao,HUANG Sheng.The deck of super aircraft carrier[J].Naval& Merchant Ships,2013,2(3):48-53.
[2]RYAN J C,CUMMINGS M L,ROY N,et al.Designing an interactive local and global decision support system for aircraft carrier deck scheduling[C]//AIAA.Cambridge Town,USA,2011.
[3]杨炳恒,韩风,王海东.舰载机机库调运作业路径[J].舰船科学技术,2012,34(8):142-143.YANG Bingheng,HAN Feng,WANG Haidong.Research on aircraft handling workflow path[J].Ship Science and Technology,2012,34(8):142-143.
[4]XING Jianjing.Behavior dynamics based motion planning of mobile robots in uncertain dynamic environments[J].Robotics and Autonomous Systems,2005,53(2):99-123.
[5]ROMERO R A F,PRESTES E,IDIART M A P.Locally oriented potential field for controlling multi-robots[J].Commun Nolinear Sci Numer Simulat,2012,17(12):4664-4671.
[6]朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.ZHU Daqi,YAN Mingzhong.Survey on technology of mobile robot path planning[J].Control and Decision,2010,25(7):961-967.
[7]TUNCER A,YILDIRIM M.Dynamic path planning of mobile robots with improved genetic algorithm[J].Computers and Electrical Engineering,2012,38(6):1564-1572.
[8]BINGUL Z,KARAHAN O.A fuzzy logic controller tuned with PSO for 2 DOF robot trajectory control[J].Expert Systems with Applications,2011,38(1):1017-1031.
[9]JOHO D,SENK M,BURGARD W.Learning search heuristics for finding objects in structured environments[J].Robotics and Autonomous Systems,2011,59(5):319-328.
[10]ZHANG Yong,GONG Dunwei,ZHANG Jianhua.Robot path planning in uncertain environment using multi-objective particle swarm optimization[J].Neuro Computing,2013,103(1):172-185.
[11]SCHONER G,DOSE M,ENGELS C.Dynamics of behavior:theory and applications for autonomous robot architecture[J].Robotics and Autonomous Systems,1995,16(2/3/4):213-245.
[12]LARAMCHE F,DONIKIAN S.A new approach for real time navigation in complex and structured environments[J].Computer Graphics Forum,2004,23(3):509-518.
[13]EDWARD W L,HENRIK I,RUZENA B.Scaling the dynamic approach to path planning and control:competition among behavioral constraints[J].The International Journal of Robotics Research,1999,18(1):37-58.
[14]杨世强,傅卫平.基于行为动力学的智能机器人导航行为演化研究[J].应用力学学报,2008,25(1):66-70.YANG Shiqiang,FU Weiping.Behavioral evolvement of intelligent robot for navigation based on behavioral dynamics[J].Chinese Journal of Applied Mechanics,2008,25(1):66-70.
[15]张慧娣,刘士荣,俞金寿.基于动力学系统方法的自主移动机器人行为设计[J].华东理工大学学报:自然科学版,2008,34(6):843-849.ZHANG Huidi,LIU Shirong,YU Jinshou.Designing behaviors of autonomous mobile robots based on dynamical system approach[J].Journal of East China University of Science and Technology:Natural Science Edition,2008,34(6):843-849.
[16]LAR P E,HENRIK I C.Control of mobile manipulator using the dynamical systems approach[J].IEEE International Conference on Robotics and Automation,2009,12(17):1370-1376.
[17]SCHONER G,DOSE M.A dynamical systems approach to task-level system integration used to plan and control autonomous vehicle motion[J].Robotics and Autonomous Systems,1992,10(44):253-267.