基于电致振动效应的触觉再现系统的设计与实现
2014-08-23陈思凡
陈思凡,陆 熊
(南京航空航天大学自动化学院,江苏 南京 210016)
0 引言
触觉能让人感知物体的表面特征以及物理特性,如柔软度、硬度、弹性、粗糙度以及材质等。触觉的研究一直是虚拟现实、远程操作以及人机交互等领域的研究重点。借助于触觉再现设备以及软件仿真环境,触觉再现技术能够提供触觉反馈,使用户可以通过触觉再现设备来触摸、感觉和操控虚拟环境中的物体[1]。
按照触觉再现原理可以将触觉再现方法分为基于摩擦力控制的和基于非摩擦力控制的触觉再现方法。在基于非摩擦力控制的方法当中,人们利用诸如压电单元[2]、气动装置[3]、直流电机[4]等机械制动器产生机械振动,进而实现触觉再现。电触觉方法[5-6]利用电流直接刺激人体皮肤内神经纤维来实现触觉再现。在基于摩擦力控制的触觉再现方法当中,基于空气压膜效应[7]的触觉再现方法受限于压电陶瓷的体积以及功耗,使得该方法较难实现大面积、低功耗的触觉再现装置。基于电致振动效应[8-16]的触觉再现方法,利用电极和手指之间的静电吸引力能够实现较为精细的、大面积的触觉再现。
本文结合电致振动效应原理和微加工技术,设计实现基于电致振动效应的触觉再现系统。
1 触觉再现系统基本原理
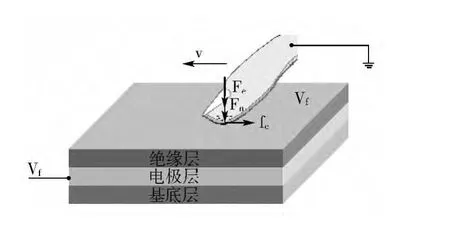
图1 触觉再现面板示意图
本系统的触觉再现面板包含3个部分(见图1):基底层、电极层和绝缘层。人手和触觉装置面板绝缘层接触或者靠近的时候,给触觉再现面板里的电极层施加电信号,人手和触觉再现面板的电极层就类似于电容的2个极板。人手角质层、空气层和触觉再现面板的绝缘层就充当了这个电容的电介质。
如图1所示,电容两极板在电场的作用下对彼此产生静电吸引力Fe为:

其中,ε0代表自由空间介电常数,A代表手指和面板的有效接触面积,Vf代表手指和电极层的电势差,εi、εsc分别代表绝缘层和人手角质层的相对介电常数,di、dsc分别代表绝缘层和人手角质层的厚度。
当人手手指在触觉装置面板表面滑动的时候,面板表面就会给手指一个阻碍手指移动的摩擦力。这个摩擦力fe可以通过公式(2)来描述:

其中,μ代表面板表面和手指的滑动摩擦力系数,Fn代表人手指施加给面板表面的法向压力,Fe代表手指和触觉装置面板之间的静电吸引力。
2 触觉再现系统构成
基于电致振动效应的触觉再现系统由如下几个模块组成:触觉再现面板、开关阵列模块、电源模块、液晶显示模块、中央控制模块等。各个模块框图如图2所示。
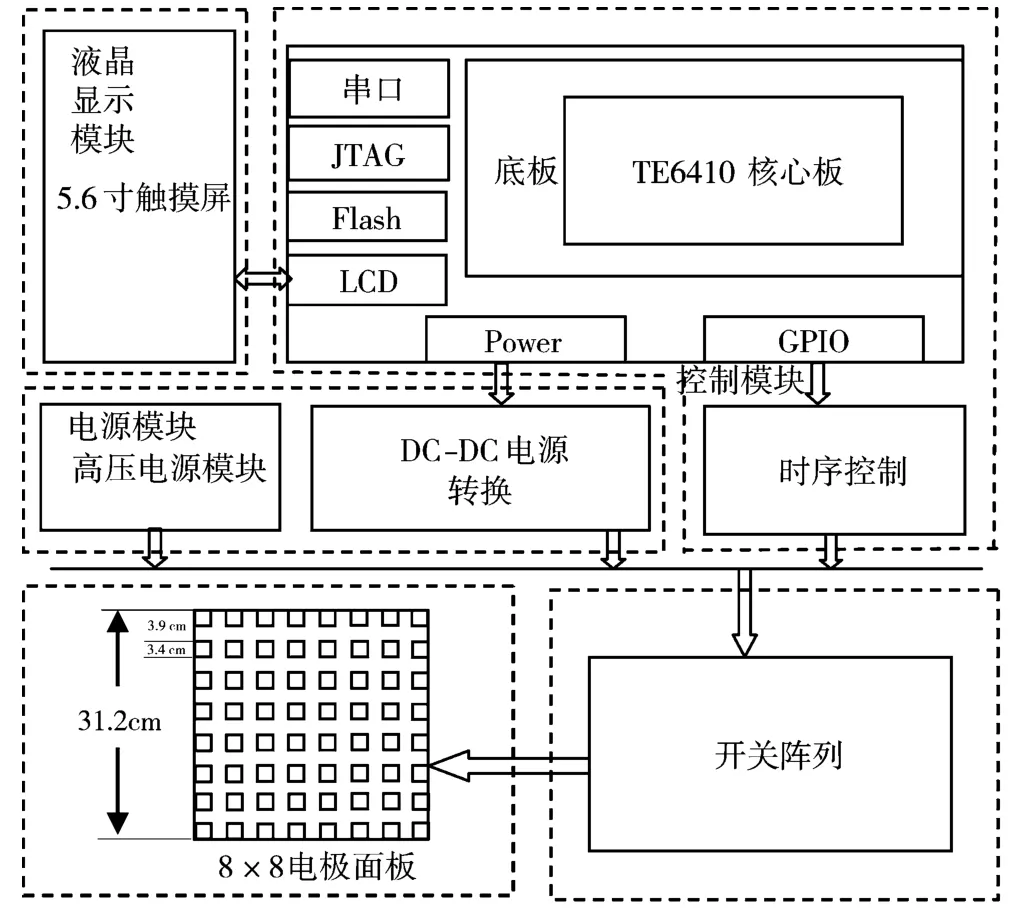
图2 基于电致振动效应的触觉再现系统模块框图
各模块的功能如下:中央控制模块主要负责整个系统的初始化以及对其它模块的控制;电源模块主要由高压电源和低压转换电路组成;开关阵列模块主要负责对触觉面板上各个电极的激励信号的控制;触觉面板主要功能是实现触觉再现,由8×8电极阵列组成;液晶显示模块主要负责对整个实验过程的记录等功能。
2.1 触觉再现面板
触觉再现面板是本系统的关键模块之一。如图1所示,基底层是电极层的加工基底;电极层由8×8的电极阵列组成;绝缘层主要由绝缘薄膜组成。每一块电极为2.29mm×2.29mm的正方形方块电极,电极间中心距离为3.15mm。
触觉再现面板的加工过程如下:首先利用PCB加工技术完成电极层及电极引线的制作。然后在PCB板上旋涂一层绝缘薄膜,将电极之间的间隙填充起来。接下来对已经填充的电路板进行化学机械抛光,直至裸露出铜电极为止。最后利用旋涂工艺在平整的铜电极表面旋涂一层聚酰亚胺薄膜。触觉再现面板实物图如图3所示。
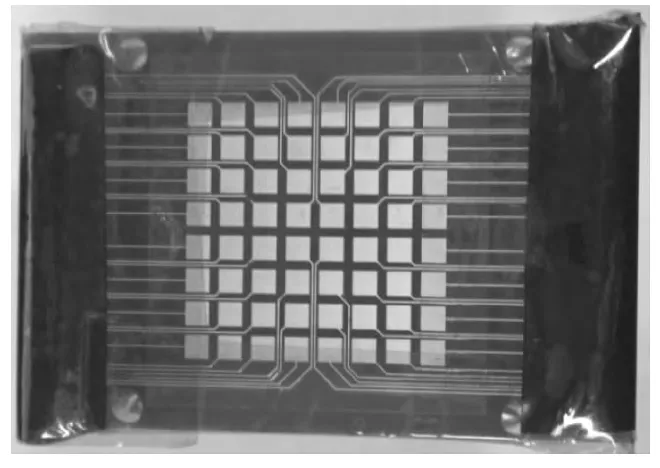
图3 加工后的触觉面板实物图
2.2 开关阵列模块
该模块采用HV507芯片来实现对每一个电极信号的控制。HV507是一款将串行低压转换到并行高压推挽输出的64路高压集成转换器。其直流输出电压可以达到300V,每一个输出通道的输出电流在±1mA以内,满足本系统所需的电压要求以及系统安全要求。该芯片的64路输出通道和触觉再现面板的64个电极相连。
HV507的控制时序主要由时钟信号(CLK)、锁存信号(LE)、串行输入信号(DA)来产生:(1)拉低LE,通过64次时钟上升沿触发信号,将串行数据从DA管脚移位至芯片内部的64位移位寄存器;(2)拉高LE,64路高压输出管脚按照移位寄存器内每一位的逻辑电平输出相对应的高压信号,其中逻辑1对应高压输出,逻辑0对应0V电压输出。
2.3 电源模块
电源模块包括逻辑电压模块和高电压模块2部分。逻辑电压模块主要由5V转3.3V电压转换电路组成,转换芯片为低压差线性调压器LM1117;高电压模块选用的高压电源规格为:5V电压输入,0V~400V电压输出,最大电流输出为1.5mA。
2.4 液晶显示模块
此模块主要用来实现实验参数的配置、实验数据的保存以及实验数据显示等功能。实验参数包括电压幅度、电压频率、占空比、电极尺寸、电极电压模式等。实验数据保存功能主要是用户感知的结果保存到系统的Flash存储器当中。实验数据显示功能主要是实现将实验数据显示到液晶显示屏上。
2.5 中央控制模块
此模块采用ARM11处理器S3C6410,其硬件平台为核心板加底板设计,配备有串口、JTAG、液晶显示接口、Flash存储、GPIO扩展接口等。此模块软件采用嵌入式Linux操作系统,使用Qt开发本系统的图形用户界面。Qt程序的软件框图如图4所示,软件主线程主要完成对系统主界面的初始化;子线程用来产生开关阵列的时序波形。
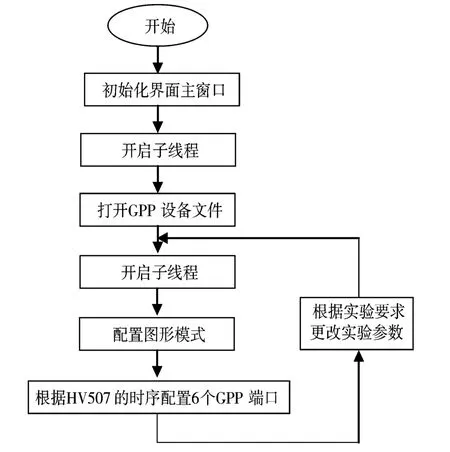
图4 触觉再现系统软件框图
3 触觉再现实验和结果
触觉再现实验环境如图5所示。电致振动效应的触觉再现系统的工作原理决定了系统性能受人体皮肤特性以及环境条件等影响:手指皮肤中的汗液、油脂等,触觉面板表面的空气水分会造成手指和面板间电场强度的减小,继而影响静电力的大小,因而会影响人手的感知效果。因此,本文采用以下措施来尽可能降低手指皮肤特性和环境湿度对实验的影响:(1)实验对象在实验前先用肥皂水清洗手指,以除去手指上的汗液、油脂、污渍等;(2)通过空调的调温和除湿功能使得室内温度保持在19℃ ~25℃之间,室内湿度保持在35%~48%之间。
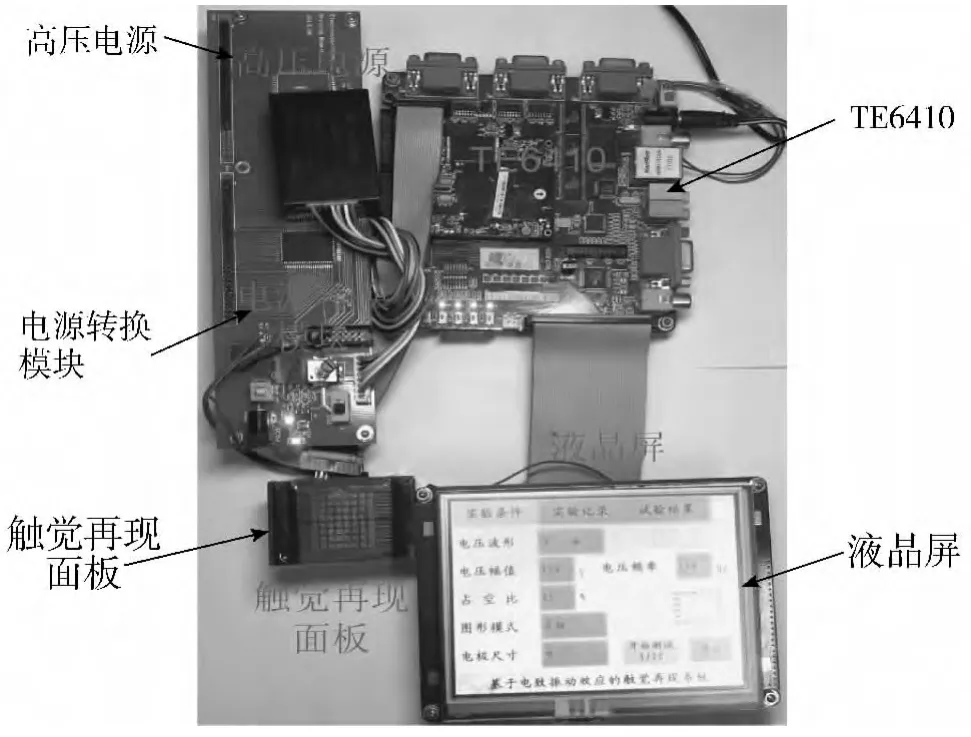
图5 触觉再现系统实验环境
为了验证本系统触觉再现的有效性,本文邀请了7名实验对象来参与实验,采用3种图形模式(如图6所示)作为感知目标,开展触觉再现验证实验。实验所用电压信号为方波信号,幅值为204V,频率为149Hz,占空比为50%。
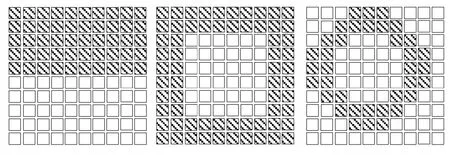
图6 触觉再现实验3种图形模式
实验步骤具体如下:(1)本实验建立如图6所示的图形模式。通过Qt程序产生开关阵列模块对应与相关图形模式的时序,以此来控制相应电极信号的有和无;(2)实验对象对不同的图形模式进行触摸感知,判断其感知出的图形模式和图6中哪一个最接近。如果其感知的图形模式和系统设定图形模式相符合,就认为其感知成功,并且记录下这个结果。对7位实验对象进行实验(不限定次数),结果如表1所示。
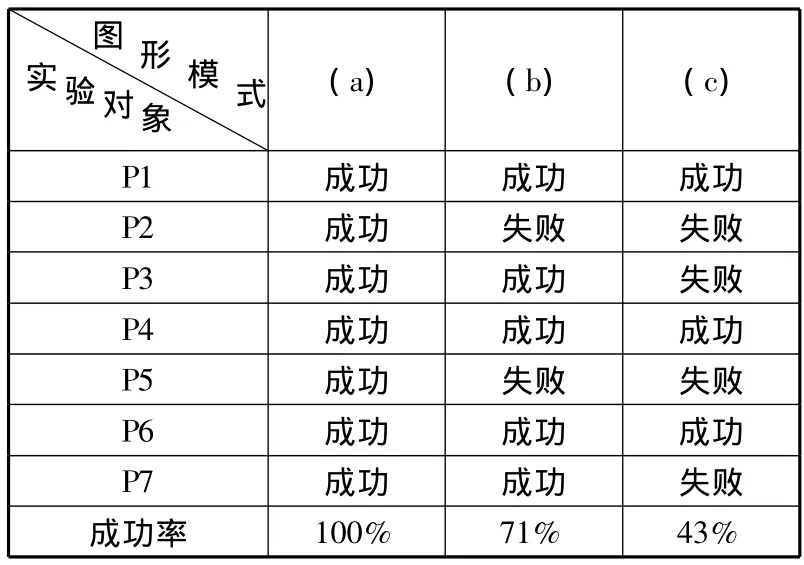
表1 触觉再现验证实验数据
从实验结果可以得出以下结论,对于轮廓比较鲜明的图形模式(如正方形等),人手指的感知成功率较高,而对轮廓不鲜明的图形模式(如圆等)的感知成功率相对较低。尽管有很多因素(如电压特性、电极尺寸参数、触觉面板的物理参数等)可能会影响到实验结果,但是人手指仍然能够对简单的图形进行认知,这为将来更加复杂图形模式的触觉再现积累了经验。
4 结束语
作为人机交互模式的扩展,触觉再现可以进一步改善人机交互的质量。本文设计并实现了基于电致振动效应的触觉再现系统,通过实验验证了该系统在触觉再现领域的有效性和可行性。
:
[1]陈旭.纹理触觉检测与再现技术的研究[D].南京:东南大学,2007.
[2]Ikei Y,Fukuda S.Tactile display presenting a surface texture sensation[J].Transactions of the Information Processing Society of Japan,1996,37(3):345-354.
[3]Amemiya K,Tanaka Y.Portable tactile feedback interface using air jet[C]//Proceedings of the 9th International Conference on Artificial Reality and Tele-Existence(ICAT 1999).1999:115-122.
[4]Lindeman R W,Yanagida Y.Empirical studies for effective near-field haptics in virtual environments[C]//IEEE Virtual Reality 2003 Conference.2003:287-288.
[5]Melen R D,Meindl J D.Electrocutaneous stimulation in a reading aid for the blind[J].IEEE Transactions on Biomedical Engineering,1971,18(1):1-3.
[6]张竹茂.基于手指的触觉替代视觉系统的研制[D].上海:上海交通大学,2009.
[7]Winfield L,Glassmire J,Colgate J E,et al.T-PaD:Tactile pattern display through variable friction reduction[C]//IEEE 2007 EuroHaptics Conference,Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems.2007:421-426.
[8]Mallinckrodt E,Hughes A L,Sleator Jr W.Perception by the skin of electrically induced vibrations[J].Science,1953,118(3062):277-278.
[9]Strong R M,Troxel D.An electrotactile display[J].IEEE Transactions on Man-Machine Systems,1970,11(1):72-79.
[10]Tang H,Beebe D J.A microfabricated electrostatic haptic display for persons with visual impairments[J].IEEE Transactions on Rehabilitation Engineering,1998,6(3):241-248.
[11]Kaczmarek K A,Nammi K,Agarwal A K,et al.Polarity effect in electrovibration for tactile display[J].IEEE Transactions on Biomedical Engineering,2006,53(10):2047-2054.
[12]Wijekoon D,Cecchinato M E,Hoggan E,et al.Electrostatic modulated friction as tactile feedback:Intensity perception[M]//Haptics:Perception,Devices,Mobility,and Communication.Springer Berlin Heidelberg,2012:613-624.
[13]Nakamura T,Yamamoto A.Multi-finger electrostatic passive haptic feedback on a visual display[C]//World Haptics Conference(WHC).2013:37-42.
[14]Linjama J,Makinen V,Suvanto P.Method and apparatus for sensory stimulation:U.S.Patent 8,174,373[P].2012-05-08.
[15]Bau O,Poupyrev I,Israr A,et al.TeslaTouch:Electrovibration for touch surfaces[C]//Proceedings of the 23rd Annual ACM Symposium on User Interface Software and Technology.ACM,2010:283-292.
[16]Meyer D J.Electrostatic Force on a Human Fingertip[D].Northwestern University,2012.