机载LiDAR检校场布设及检校技术探讨
2014-08-16林先秀
林先秀
(福建省测绘院,福建 福州 350003)
一、引 言
LiDAR技术是一种全新的获取地理信息数据的手段,具有普通摄影测量无法比拟的优势,具有自动化程度高、受天气影响小、数据生产周期短、精度高等特点。机载LiDAR传感器发射的激光脉冲能部分地穿透树林遮挡,直接获取高精度三维地表地形数据。因此,近年来,LiDAR技术逐渐被应用于基础测绘、道路工程、电力电网、水利、石油管线、海岸线及海岛礁、数字城市等领域。随着LiDAR技术的广泛应用,与其相关的一些技术研究也越来越引起人们的重视,如点云的分类提取、LiDAR数据滤波方法、点云高程数据精度检核方法、激光雷达的误差及检校等。其中又以激光雷达的误差及其校正技术最为关键,因为它直接关系到所获取点云数据的可靠性及精确度。本文就以某山区项目为例,从检校场的布设、航迹解算、激光检校等方面对该技术作一些试验性的测试研究。
二、误差分类简述
机载LiDAR系统是一个复杂的集成系统,主要包括:① 动态差分GPS接收机,用于确定扫描投影中心的空间位置;② 姿态测量装置(IMU),用于测量扫描装置主光轴的空间姿态参数;③ 激光扫描测距系统,用于测量传感器到地面点的距离;④ 一套成像装置(主要是数码相机),用于获取对应地面的彩色数码影像,最终制作正射影像。LiDAR的精度受到系统内各个组成部分的共同影响,误差来源很多也很复杂,可以分为量测误差和集成误差两大方面。量测误差主要包括测距误差、GPS定位误差、IMU姿态误差等;集成误差包括硬件安置误差和数据处理误差等。
三、试验与分析
1. 布设检校场
此次试验所依托的项目是福建某山区地市,项目总设计航摄面积约20 000 km2,要求采用2000国家大地坐标系和1985国家高程基准,点云高程精度见表1。
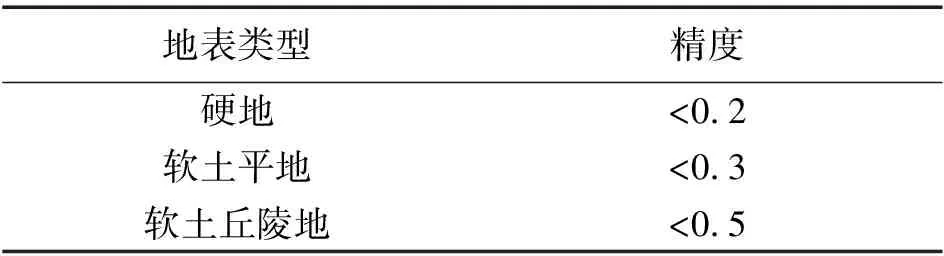
表1 点云高程精度指标 m
由于项目涉及范围较大,为了获取相对精确的检校数据,技术人员首先选取地势相对平坦的城区来布设检校场,城区中间有一条笔直宽阔的道路,附近还有一较大的尖顶建筑物,比较符合检校航线的布设需求,如图1所示。
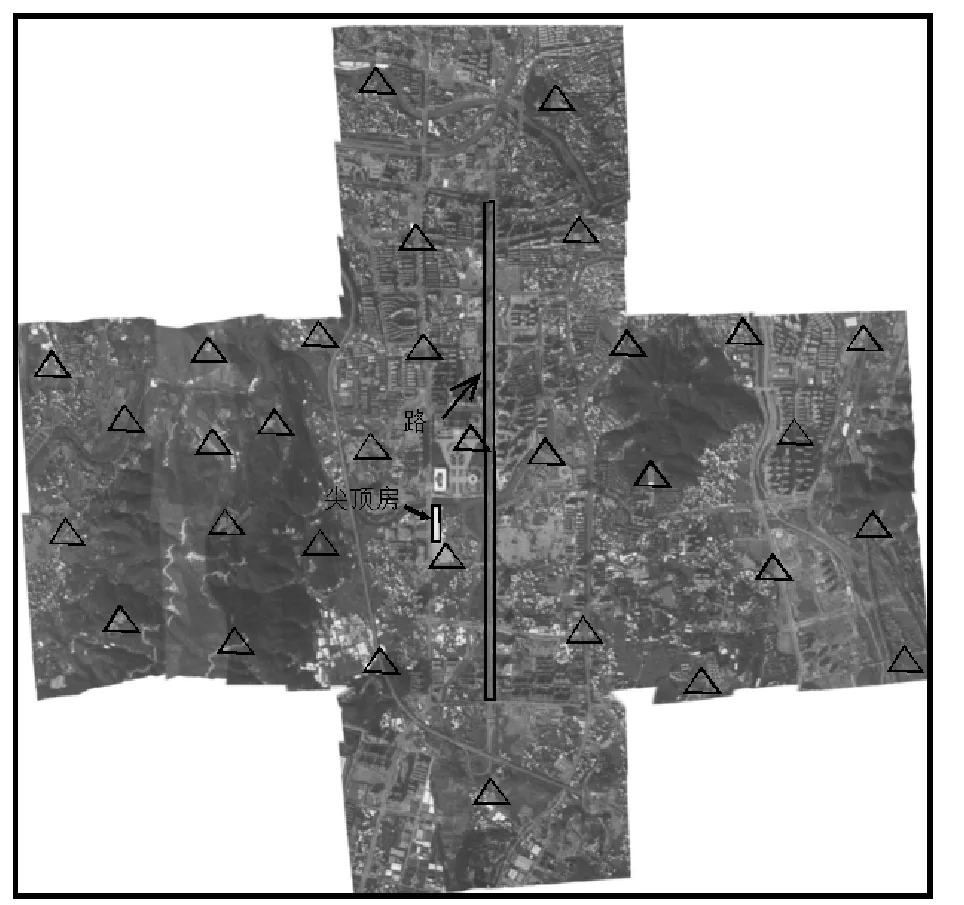
图1 检校场及激光检校外业布控设计
检校航线设计如图2所示,细长航线为激光检校航线,设计绝对航高2600 m,相对航高2300 m。其中A05和B05、A08和B08、A09和B09为反向对飞的航线,08航线和09航线平行,旁向重叠度60%,尖顶建筑物位于08航线的中心且在09航线的边缘,屋脊线垂直于航线。05航线垂直于08航线和09航线,且以宽阔的马路为中心线。图中的短粗航线为相机检校航线,本文不对相机检校作论述。
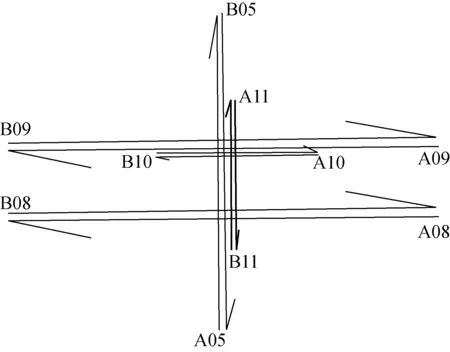
图2 检校场航线设计图
2. 航摄仪相关参数
航摄仪相关参数见表2。
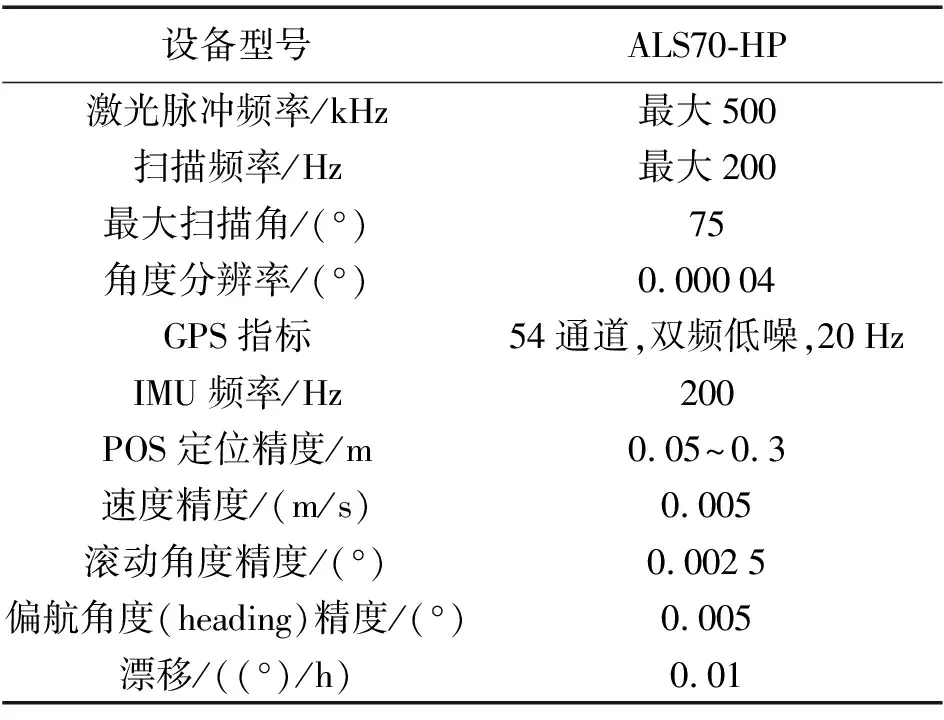
表2 航摄仪主要技术指标
3. 外业控制点布设
图1中三角标示的地方是激光检校后检核点的位置,要求外业应尽量在三角范围内平坦无遮盖的地方打点,不能打在路沿、田埂及坎等高程突变地物上。长条框范围内是宽阔马路,外业需沿马路每隔5 m打一个点,尽量打在马路中间的平坦硬化水泥路面上,不能打在路边沿及花圃等地物上。这些每隔5 m量测的外业点是作为此次检校用的控制点,考虑到距离检校对激光测距高程精度的影响较大,为了保证激光点的高程精度,本次沿路采集的距离检校点并没有使用RTK进行采集,而是采用从当地已知点拉水准的方式获取,最大限度地保证了距离检校点的高程精度[1]。
4. 航迹解算及精度分析
航迹解算精度主要是指在检校飞行中GPS的定位精度,轨迹数据的处理精度会直接影响后期的相机检校、激光检校及空中三角测量等各项处理精度,因此非常重要。其精度指标主要有以下三项:① GPS的正反算误差,要求不超过5 cm;② 激光设备的定位精度,同样要求不超过5 cm;③ PDOP值,即卫星的分布状态,该数值不能大于2.5(值越大表示卫星越少或分布越不均匀)。
航迹解算前要事先确定GPS的偏心分量,本次检校飞行设备为反向安装,即激光扫描头和相机装在飞机尾部,从机尾向机头看过去,GPS天线整体位于整套设备的左前方,如图3所示。
2.2.3 瓜秧整枝:根据该品种的特性,每株只留一个瓜。一般采用三蔓整枝方式,当主蔓长到30长,每株选留长势均匀的健壮侧蔓,多余的侧蔓及早去掉,一般选留第2~3雌花坐果,主蔓坐不住果时侧蔓雌花坐果。
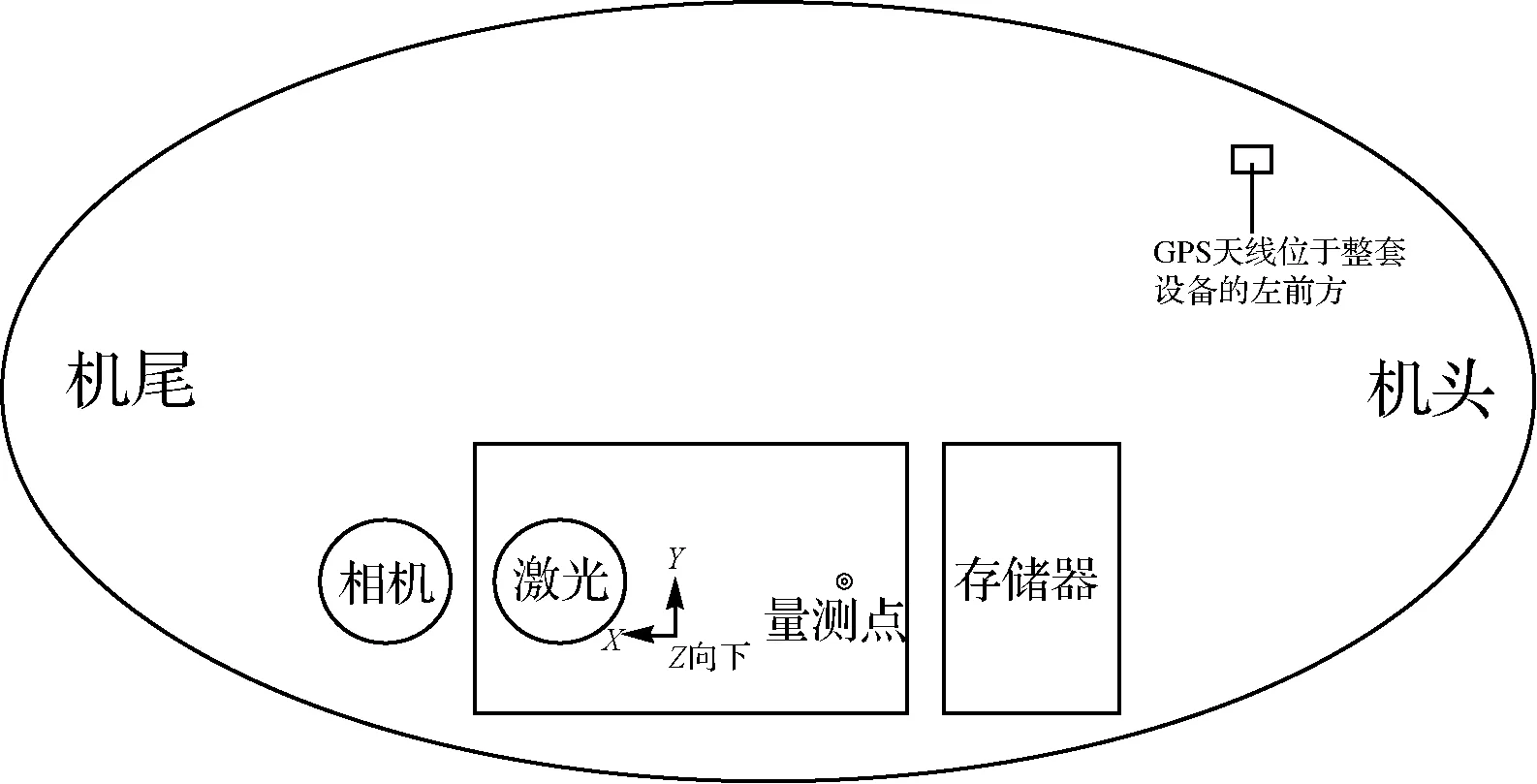
图3 飞行设备安装示意图
实测GPS天线到量测点的距离为x=1.632 m,y=0.074 m,z=1.106 m, 而量测点到坐标系原点的固定距离值为x=0.544 m,y=0.076 m,z=0.343 m,因此计算出实际的偏心分量值应为
X=-(1.632+0.544)= -2.176 m
Y=+(0.074+0.076)= +0.150 m
Z=-(1.106+0.343)= -1.449 m
由于福建省连续运行卫星定位服务系统项目已建成并投入使用,可以实时提供下载CORS数据加以应用,因此本次试验采用基站数据和精密星历数据两种方式进行解算比较。注意采用基站数据方式进行解算时,要考虑GPS差分值是固定解还是浮动解。图4、图5为使用基站数据解算后的结果。图4—图7中两条竖线范围内为有效数据的波形图。
从图4左侧指标可以看出,基站数据解算的GPS的正反算误差在X方向和Y方向可以满足精度,但在Z方向达不到5 cm的精度;右侧指标显示GPS差分值为固定解2,满足要求。从图5左侧指标可以看出设备的定位误差在X、Y、Z方向都没有超过5 cm,符合精度要求;右侧指标显示PDOP值局部达到了4以上,不能满足要求。后续还需要进行更多数据测试来分析产生这种结果的原因。
图6、图7为采用精密星历数据解算结果。
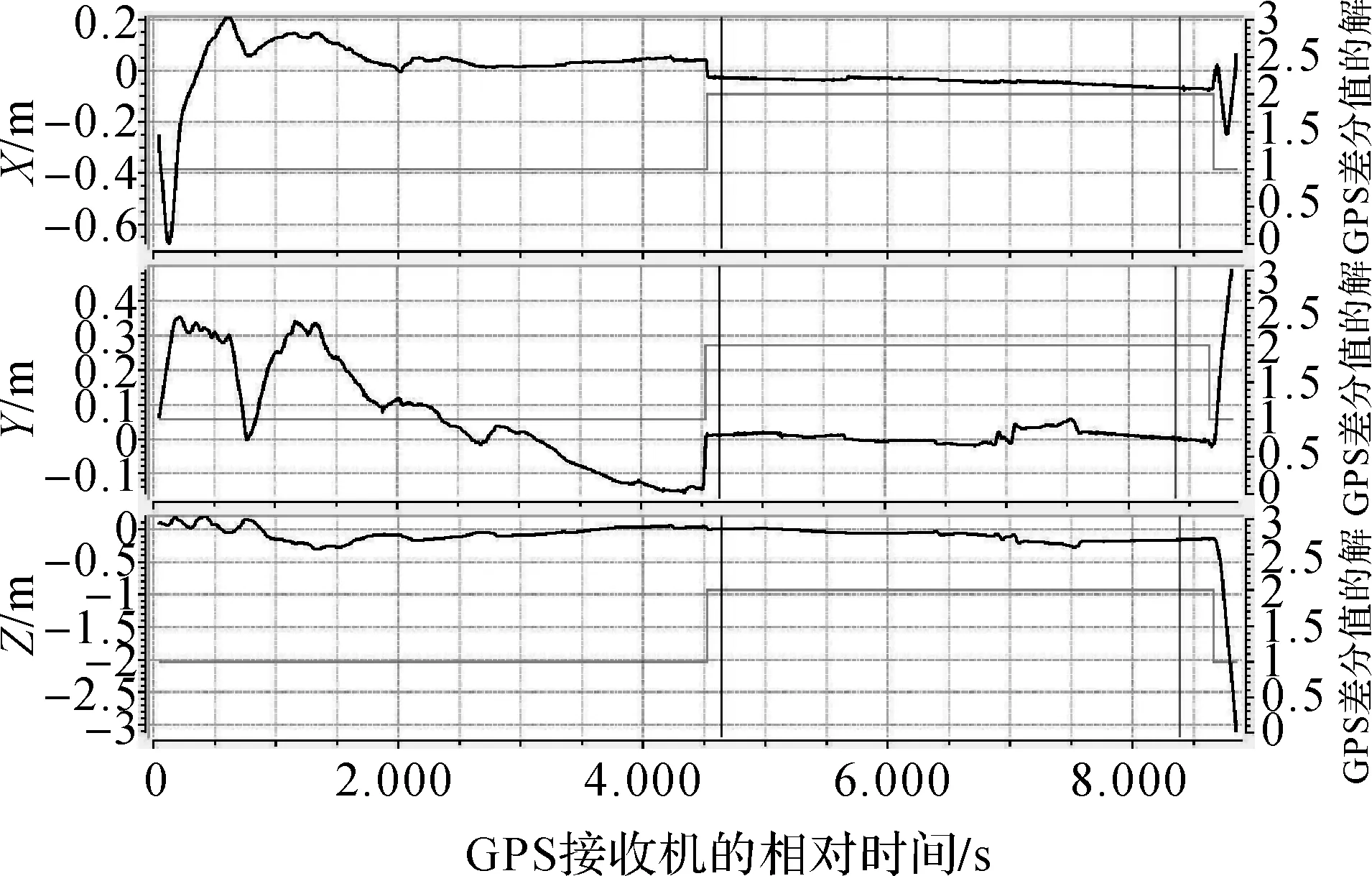
图4 基站数据解算的GPS正反算误差
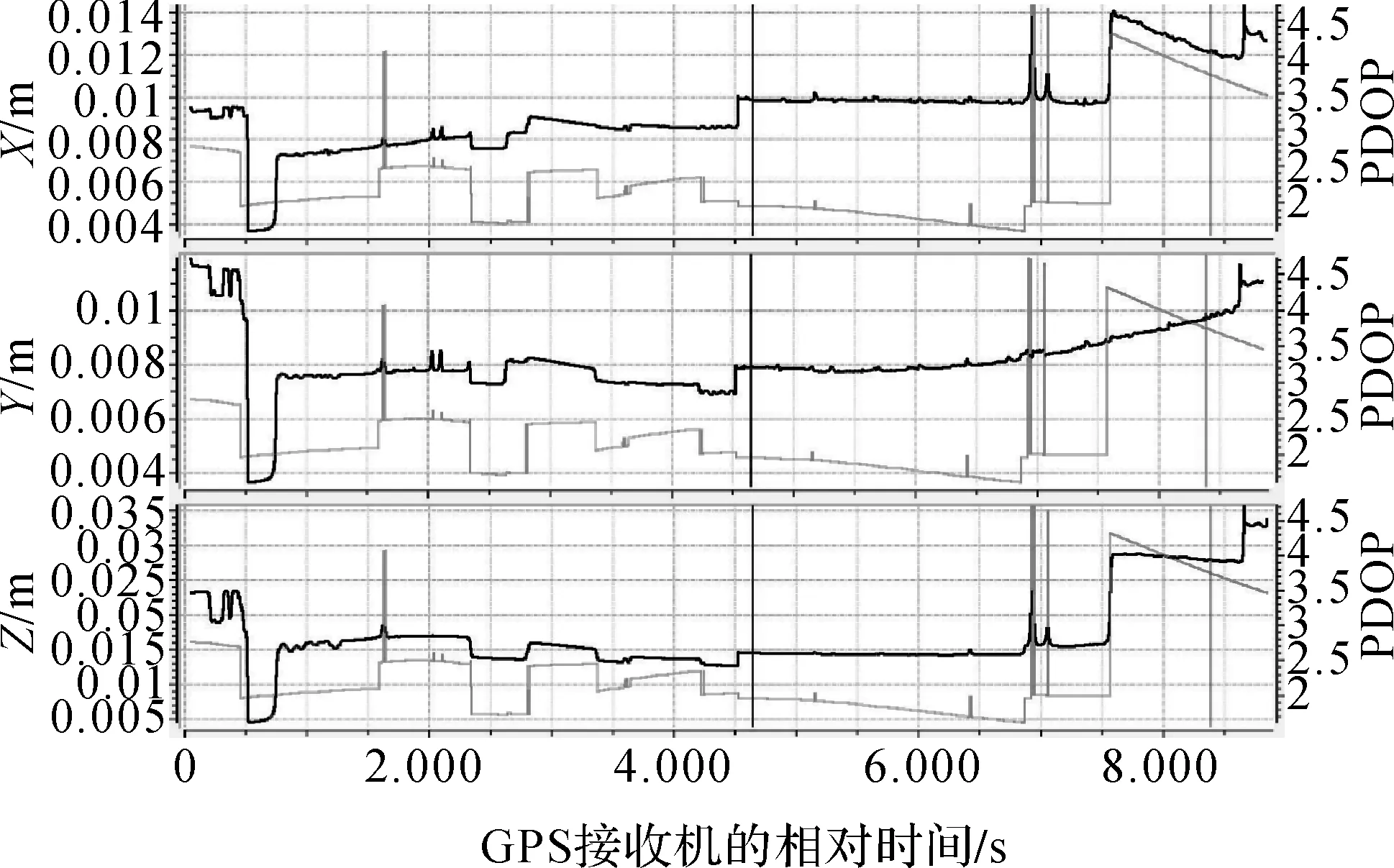
图5 基站数据解算的激光设备定位精度
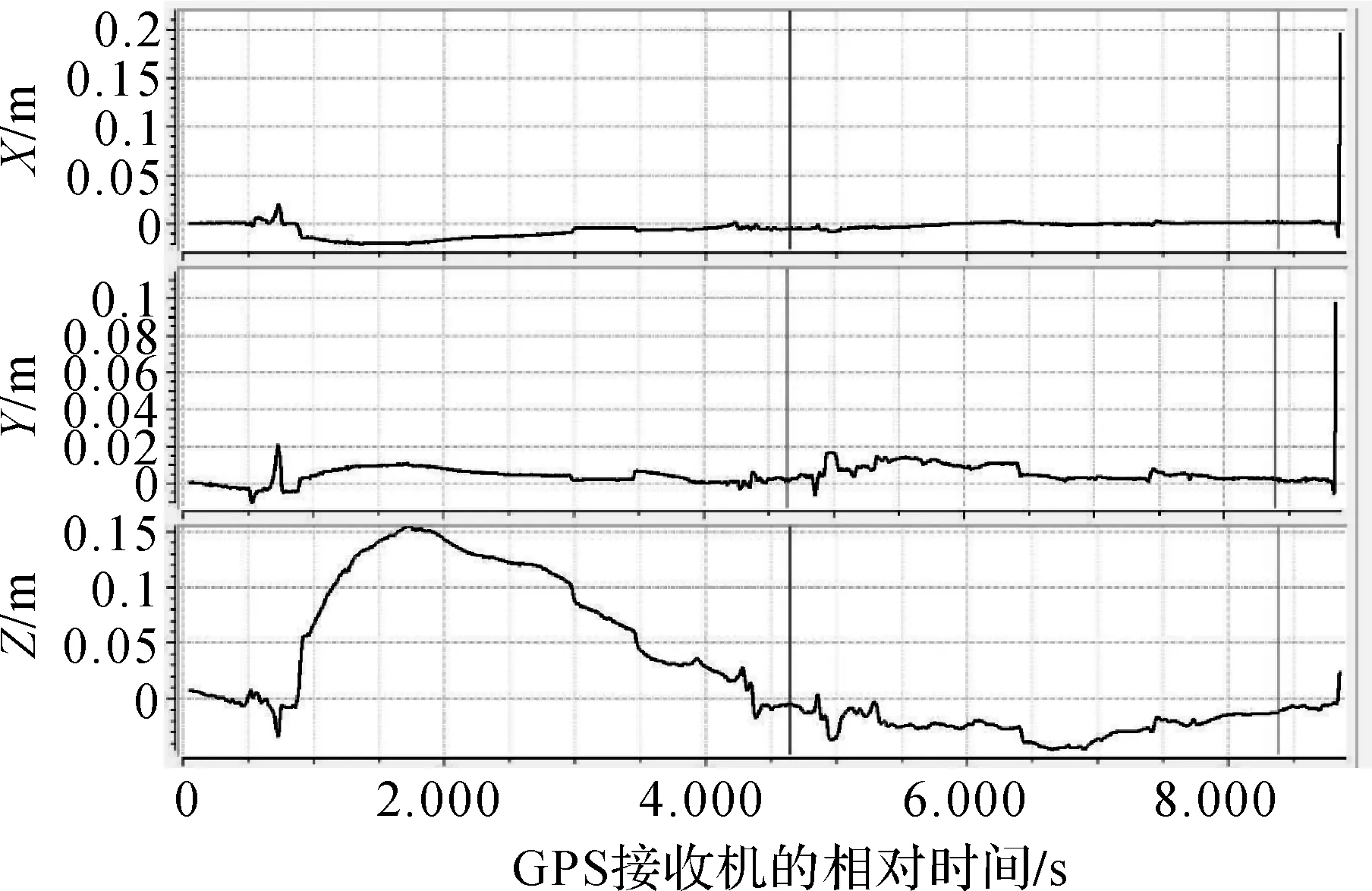
图6 精密星历数据解算的GPS正反算误差
从上面的结果可以看出,通过精密星历数据解算的航迹文件的3个精度指标都满足要求,因此获得的航摄数据可以用做进一步的检校工作。
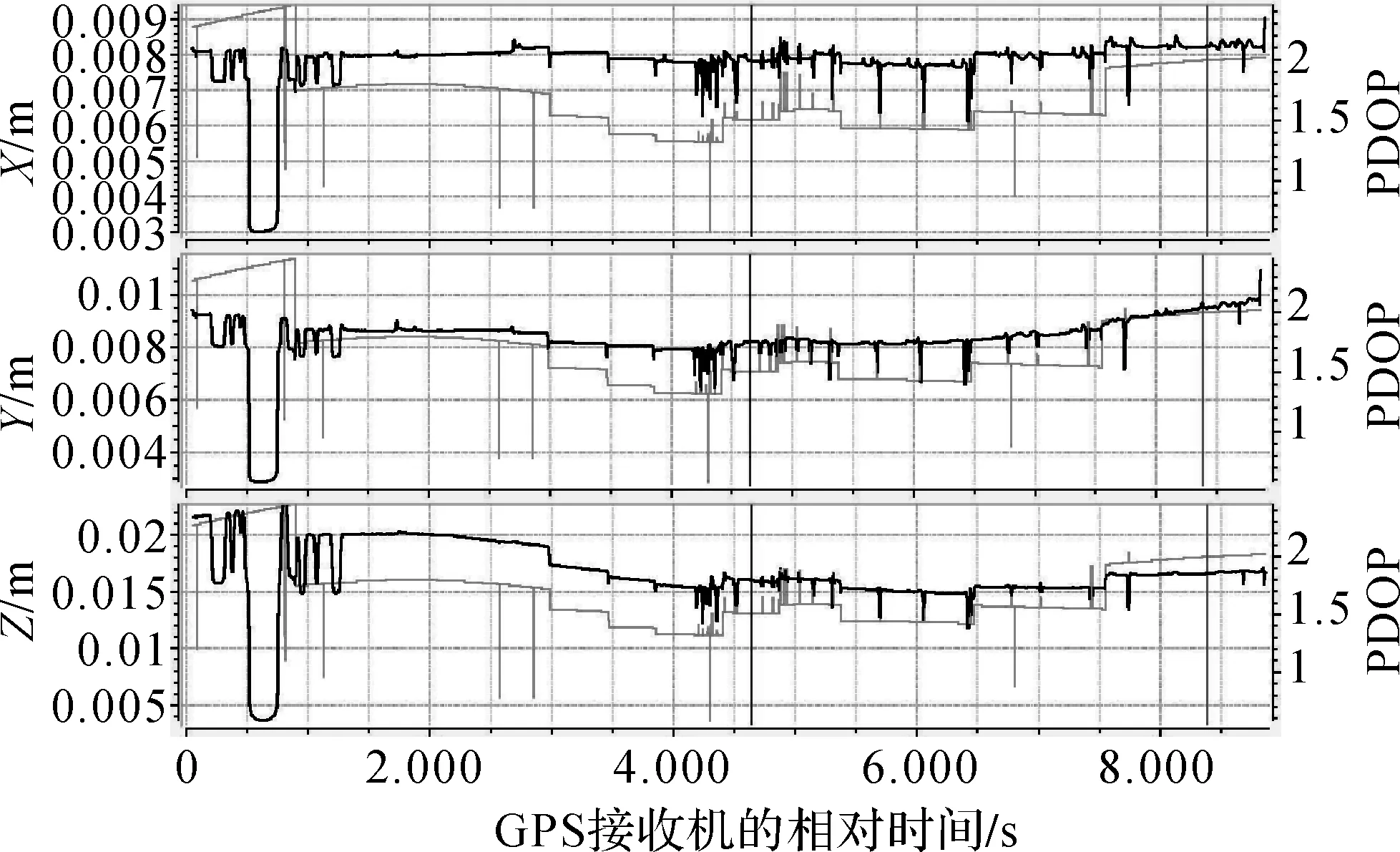
图7 精密星历数据解算的激光设备定位精度
5. 激光检校
激光检校主要是消除两个方面的误差:① IMU系统与激光扫描仪的角度安置误差[2];② 激光测距仪所测的距离与实际距离间的误差。ALS70系统有A、B两个波段,需要分开。以波段A为例:先作角度安置检校,再作距离检校。
1) roll(侧滚)检校:选择反向对飞的航线A08.las和B08.las,在Terra Scan中按航带显示,沿垂直于航线方向的平坦区域拉剖面,本例中刚好有马路,因此直接沿马路拉断面。由于roll的影响,在剖面的两端会产生差异。分别量测出两段的距离H1=10.176 m,H2=11.608 m,两量测点之间的距离L=1 917.645 m,利用公式roll=(H1+H2)/2/L,可以得到roll检校值为0.005 679 879,将该值填入ALSPP中重新生成LAS数据,可以看到roll值得到改正,差异减小。
2) pitch(俯仰)检校:选择反向对飞的航线A08.las和B08.las,在Terra Scan中按航带显示,选择航线中心处屋脊线垂直于航线方向的尖顶房,在屋顶上沿平行于航线的方向拉剖面。由于pitch的影响,屋顶会产生明显的位移,量测出距离H=2.534 m,该航线的相对航高L为2314 m,利用公式pitch=H/2/L,可以得到pitch检校值为0.000 547 598,填入ALSPP中重新生成LAS数据,可以看到pitch值得到改正,尖屋顶趋近于重叠。
3) heading(偏航)检校:选择平行航线A08.las和A09.las,在Terra Scan中按航带显示,在A08航线的中心及A09航线的边缘有一处在航线设计时选择好的尖顶建筑,该尖顶房的屋脊线垂直于航线方向,在屋顶上沿平行于航线的方向拉剖面。由于heading的影响,屋顶也会产生明显的偏移,同样量测偏移距离H=1.945 m ,该量测点到A09航线中心的距离L为746.543 m,利用公式heading=H/L,得到heading检校值为-0.002 605 927,填入ALSPP中重新生成LAS数据,可以明显看到heading值得到改正,屋顶几乎重叠。
需要注意的是,roll、 pitch、 heading检校的过程实际上是一个多次迭代、逐渐趋近的过程,3个检校值之间会相互影响,尤其是roll值对其他两个影响较大,每次都需要按照roll、pitch、heading的顺序来检校;同时要特别注意检校值的正负号,如果重新生成的数据偏移值没有消除,反而比之前增大,说明符号取反了,需重新填入计算,多次反复,直至取得最佳检校数据值。
4) 距离检校:按照航线和外业布控设计,在A05线的中心有一条平直的马路,外业沿马路每隔5 m采集一个控制点。设置扫描线的裁切角度为-7°~+7°,裁出航线中心部分,将生成的LAS数据导入Terra Scan中输出控制点的误差报告,如图8所示。
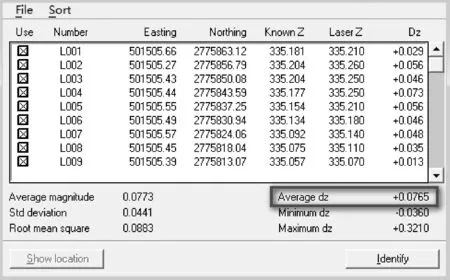
图8 第一次计算控制点精度
将得到的激光测距仪的距离改正值Average dz=+0.076 5填入ALSPP中重新生成LAS数据,同时再将外业采集的路面控制点坐标导入,输出控制点报告,如图9所示。
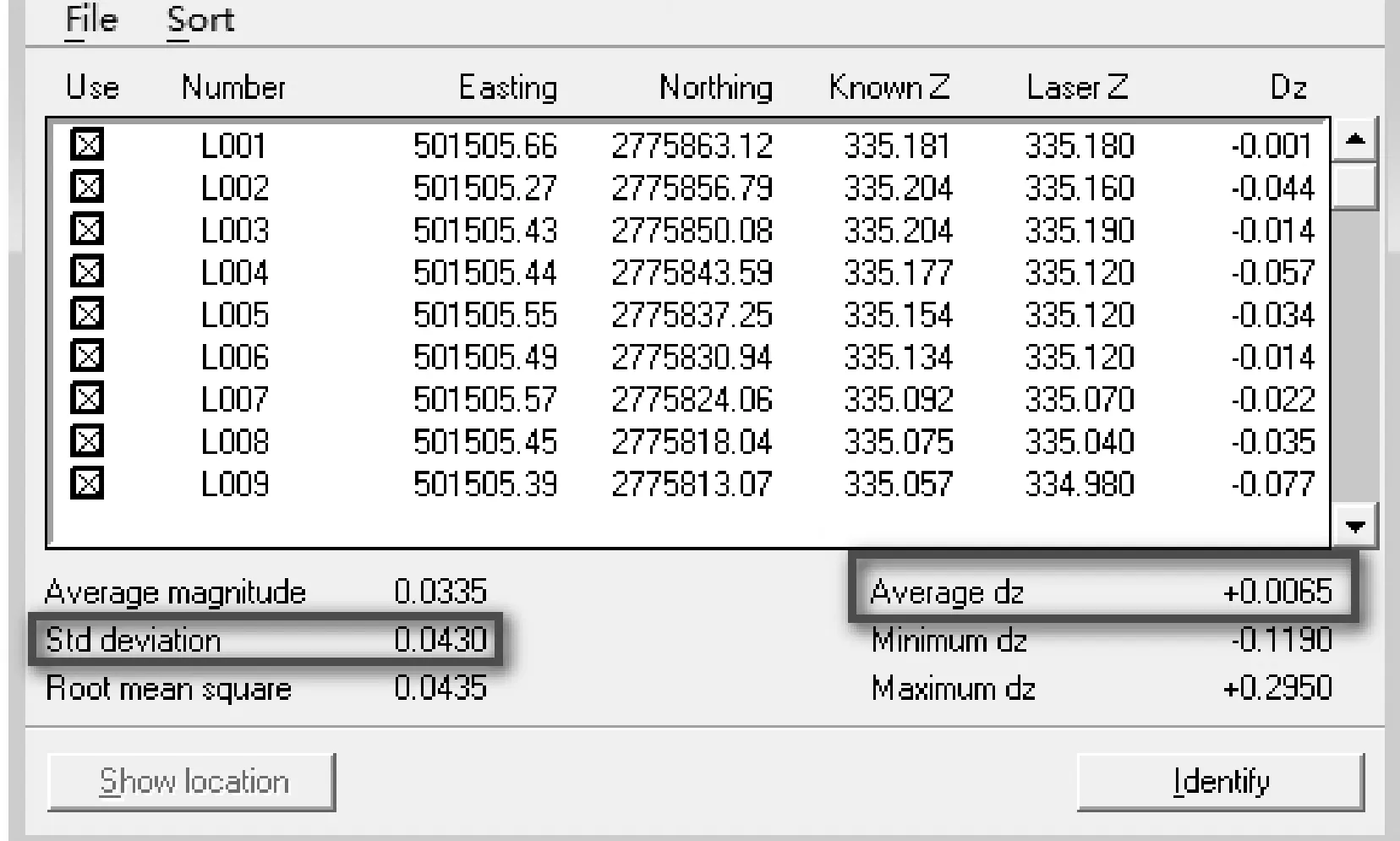
图9 第二次迭代计算控制点精度
从图9中可以看出,Average dz值接近于0,高程误差均方差Std deviation小于5 cm,这是判断距离检校是否作好的依据。作距离检校时应注意在输出控制点报告之前最好对点云进行地面点分类,去除在路面上的汽车等物体,以免影响改正值的精度[3]。
以上是以A波段为例,对B波段实施同样的操作后,多次迭代趋近后可以得到角度检校值分别为:
roll 0.006 021 451
pitch 0.000 720 046
heading -0.002 535 124
Average dz0.005 38
6. 精度评定
当A、B波段的角度检校及距离检校都完成后,用得到的检校值将所有检校航线输出LAS数据,然后进行地面点分类,这时可以用外业检查点来检测最终的点云精度,在这次试验中,最终获得的精度如图10所示。
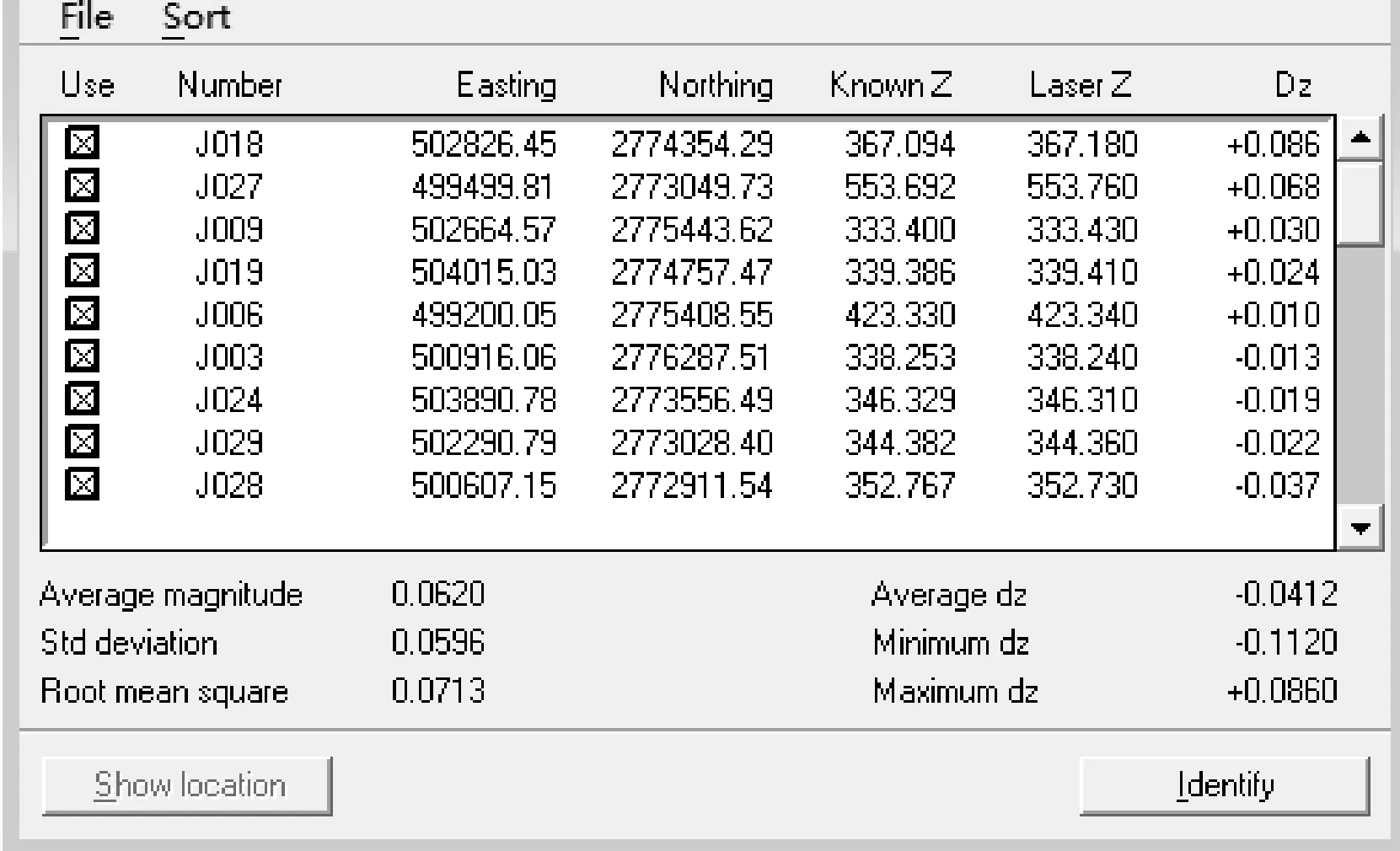
图10 检校场点云精度
从图10中可以看到试验中布设的检校场点云的高程均方差Std deviation为0.059 6 m,即高程精度达到5.96 cm,完全满足项目的设计要求。
四、总 结
通过试验可以看出,检校场应尽量选取有较宽较长且比较直的硬化路面的地点,且附近还要有一个尖顶的建筑物,为了更好地量测精度,最好建筑物的占地面积要大些。航迹解算的精度会影响整个检校结果,3个精度指标都是硬性的,必须一一达到。按以往的经验,采用基站数据解算的精度要高于精密星历的解算精度,但是在本次试验中却没有得到相应的结果,原因有可能是:① 本次检校飞行是在下午进行的,卫星信号较弱;② CORS站数据1 Hz的采样频率不够高,徕卡公司建议采样频率为2 Hz。在进行激光检校时,每个检校步骤中都应尽可能地多量测几个数值取平均来减少误差,经过反复多次迭代解算才能得到最优检校参数。
参考文献:
[1] 刘经南,张小红.利用激光强度信息分类激光扫描测高数据[J].武汉大学学报:信息科学版,2005,30(3):189-193.
[2] 张汉德,刘炎雄,别君,等. 机载LiDAR系统校准方案优化设计[J].海洋通报,2011,30(1):7-10.
[3] 朱会平.机载激光雷达测量系统检校与精度评定[D].焦作:河南理工大学,2011.
[4] 成枢,张艳亭,马浩,等. 国产机载LiDAR安置角误差检校初探[J].测绘通报,2013(1):37-40.
[5] 曲佳. 机载激光雷达点云数据精度分析与评价研究[D].西安:长安大学,2010.
[6] 赖旭东. 机载激光雷达基础原理与应用[M]. 北京:电子工业出版社,2010.
[7] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2010.
[8] 刘楠,余海坤,李鹏,等. 机载LiDAR视准轴误差检校方法研究[J].测绘通报,2012(10):96-97.
[9] 孙步阳.机载激光雷达航带拼接技术研究[D].北京:中国地质大学,2009.
[10] 刘磊.机载LiDAR系统误差分析与检校方法研究[D].青岛:山东科技大学,2011.
