亚轨道飞行器无动力自动着陆的横侧向控制
2014-08-11赵志芳倪少波贾志强穆晓敏
赵志芳 倪少波 贾志强 穆晓敏
北京航天自动控制研究所,北京100854
亚轨道飞行器无动力自动着陆的横侧向控制
赵志芳 倪少波 贾志强 穆晓敏
北京航天自动控制研究所,北京100854

针对重复使用亚轨道飞行器无动力自动着陆的横侧向控制,偏航通道根据状态反馈和输出反馈理论将“偏航角速度+偏航角”反馈转换成适于工程应用的“偏航角速度+侧向过载”控制方式;滚转通道设计了“滚转角速度+滚转角”控制方式,在此基础上首次推导了BTT控制方式侧偏距回路的稳定性分析原理,并据此理论设计了横侧向回路的控制参数。仿真结果表明所设计的横侧向控制器能够快速消除侧滑角,有效的消除侧偏距,并且对平稳风和切变风有较强的鲁棒性。
无动力自动着陆;横侧向控制;BTT;侧偏距回路稳定性
重复使用亚轨道飞行器(Sub-Orbital Reusable Launch Vehicle, SRLV)作为集成了运载火箭、航天器和航空器(无人机)等多项技术的复杂飞行器,无动力自动着陆控制技术是其重要的关键技术,SRLV飞行器自动着陆过程中飞行速度低、具有复杂的大气条件如平稳风、风切变、大气紊流和地面效应等,控制目标要求高精度对准跑道,因此要求飞行器在横侧向控制方面具有较强的抗干扰和抗侧风能力以及高精度的跟踪性能。本文采用飞行器迎着侧风飞行(侧滑角为0°),滚转控制侧偏距的协调转弯控制策略(BTT),以提高横侧向抵抗侧风的能力。
偏航通道控制方法主要有2种:1)采用偏航角速度控制,当飞行器的静不稳定度很大时,需要很高的控制增益才能使系统稳定,工程实现不可行;2)采用“角速度+侧滑角”反馈,由于侧滑角测量设备复杂,测量精度难以满足设计需求,因此本文采用“角速度+侧向过载”的控制方式,首先设计“侧滑角+角速度”状态反馈的控制参数,然后通过状态反馈和输出反馈的转换原理将“侧滑角+角速度”控制参数转换成“侧向过载+角速度”的控制参数。
传统侧偏距回路的稳定性分析是基于STT控制方式下结合偏航通道内回路频率特性进行,本文是基于BTT控制方式纠正侧偏,该控制方式需要结合滚转通道来实现,现有的频域分析方法没有结合滚转通道的频域特性来分析侧偏距回路的稳定性,本文从BTT控制的原理出发,结合滚转通道的控制方式推导了BTT控制侧偏距回路的稳定性分析原理,设计了“滚转通道滚转角速度+滚转角”的控制参数,并根据推导的BTT控制侧偏距回路的稳定性分析原理设计了“侧偏距+侧偏速度”的控制参数。
1 问题描述
(1)
式中,β,γc为侧滑角和速度倾斜角,m,V,θ分别为飞行器的质量、速度和弹道倾角,ωx1,ωy1,ωz1分别为滚转、偏航和俯仰角速度,Jx1,Jy1,Jz1为飞行器的主转动惯量。Y,Z分别是气动升力和侧向力,Mx1,My1和Mz1分别为滚转力矩、偏航力矩和俯仰力矩。
经过线性化处理[1]得到横侧向的小偏差的方程:

(2)
其中,
x=[Δωy1ΔβΔωx1Δγv]T
u=[ΔδrΔδa]T
y=[ΔβΔNz1Δγv]T
(3)
ΔNz1为机体坐标系下的侧向过载。
2 控制器设计
2.1 状态反馈到输出反馈之间的转换关系
状态反馈是将系统状态作为反馈变量,反馈变量乘以反馈增益到输入端与参考输入相加形成控制律,作为受控系统的控制输入。状态反馈的结构图如图1。

图1 状态反馈的结构
由图1可以看出,状态反馈下受控系统的输入为:
u=-Κx+r′
(4)
输出反馈是输出矢量乘以反馈矩阵到输入端,与参考输入相加形成控制律,输出反馈的结构图如图2。
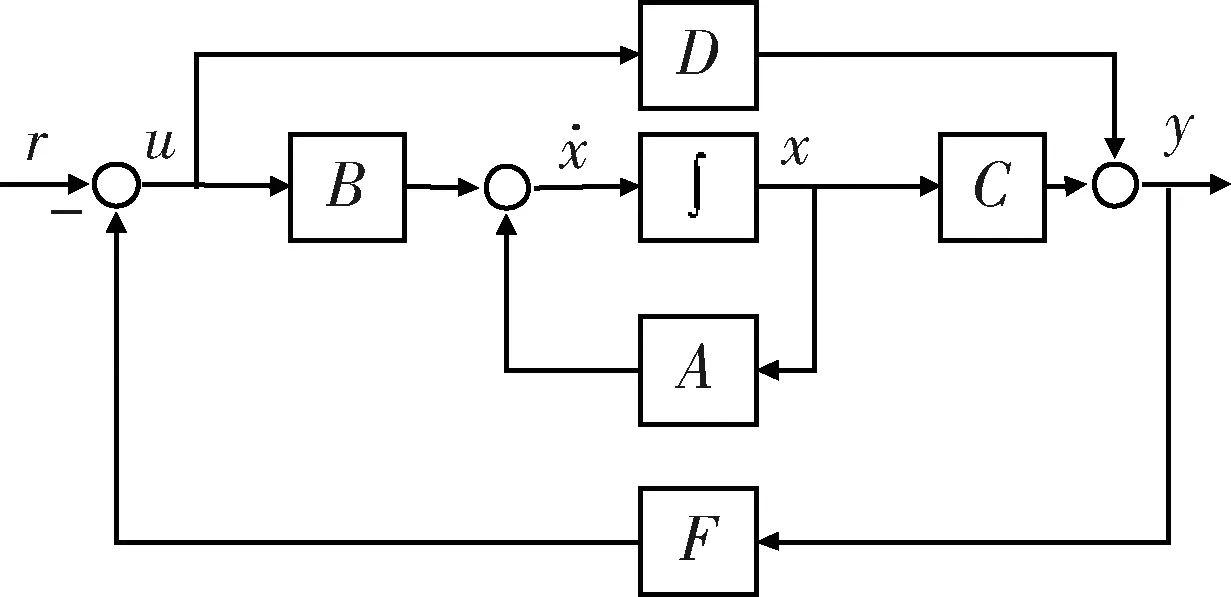
图2 输出反馈的结构
由图2可以看出,输出反馈下受控系统的输入为:
u=-Fy+r
(5)
当系统全状态可观时,状态反馈和输出反馈之间可相互转化,转换的关系式如下:
u=-Kx+r′=-Fy+r
(6)
由式(2)可知,
x=C-1(y-Du)
(7)
将式(7)代入式(6),得
u=-KC-1(y-Du)+r′
(8)
求解得到:
u=-(I-KC-1D)KC-1y+(I-KC-1D)r′
(9)
令r=(I-KC-1D)r′,可得到状态反馈和输出反馈之间的转换关系为:
F=(I-KC-1D)KC-1
r=(I-KC-1D)r′
(10)
2.2 BTT控制方式侧偏距回路稳定性分析原理推导
BTT控制是指通过飞行器倾斜来实现转弯或者机动,BTT控制要求侧滑角近似为0°。基于BTT控制方式纠正侧偏是需要通过滚动通道控制倾侧角来实现,因此需要结合滚转通道的控制方程来分析侧偏距回路的稳定性,具体推导过程如下。
由坐标转换原理可知:
(11)
飞行过程中,Nz1≈0,则

(12)
其中,Ny1和Nz1为机体坐标系的过载,Nym和Nzm为弹道系下的过载。
设定程序滚转角由侧偏距Zm和侧偏速度Vzm反馈生成,如下式

(13)
由于内回路角速度反馈属于短周期运动,会快速的衰减,则闭合滚转通道内回路后侧偏距回路的控制方程为
(14)
将式(12)代入式(14),得到侧偏距回路的闭环特征方程
(15)
为保证纠偏过程中无超调,取阻尼系数为1.0,ωn为外回路的截止频率,则侧偏距Zm和侧偏速度Vzm的反馈增益为
(16)
2.3 设计偏航通道的控制器
选取某下滑飞行段的几个特征点,选取状态反馈量为[βωy1],通过频域设计理论设计了状态反馈增益K=[1.4,1.07],选取输出反馈量[Nz1ωy1],根据式将状态反馈增益转换成输出反馈增益F=[0.06,0.19],偏航通道Bode图如图3所示。
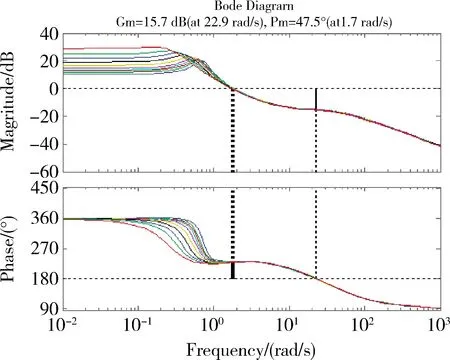
图3 偏航通道角速度+过载控制bode图
2.4 设计滚转通道的控制器
选取状态反馈量为[γωx1],通过频域设计理论设计了滚转通道滚转角和滚转角速度的反馈增益K=[12.5,0.63],滚转通道Bode图如图4所示。
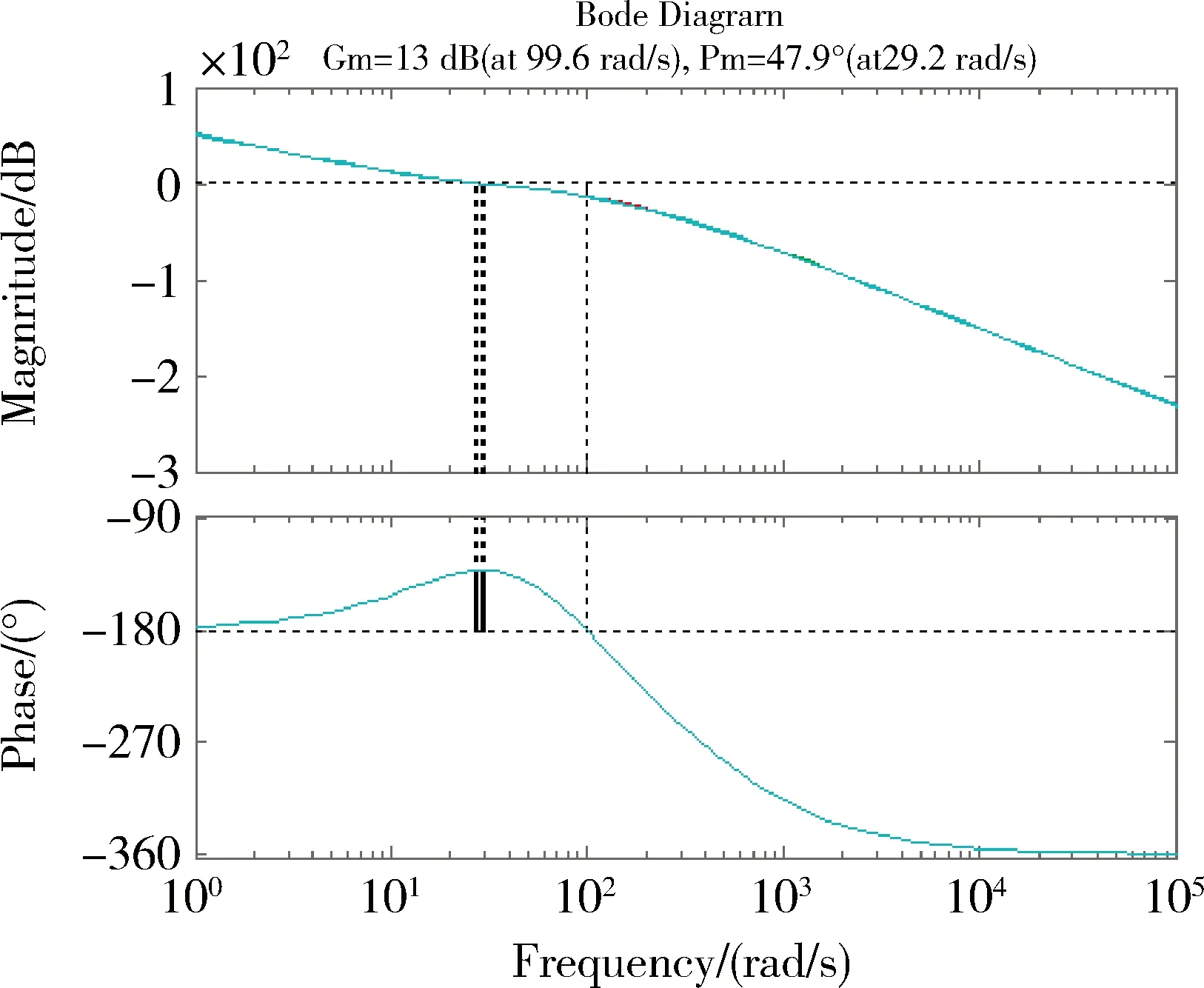
图4 滚转通道滚转角+角速度控制Bode图


图5 侧偏距回路侧偏距+侧偏速度Bode图
3 仿真结果
针对本文设计的控制方案和控制参数,进行六自由度数学仿真,仿真条件1):飞行器在着陆过程中某一时刻侧向偏离为20m,飞行过程中加入10m/s的平稳风,3m/s的切变风; 2):为充分说明本文设计的控制方案的优势,将传统的“侧滑角+角速度反馈”的控制方案进行了六自由度仿真,其中侧滑角是由控制计算机计算的侧滑角。仿真结果如图6~10所示。

图6 仿真条件1侧偏距

图7 仿真条件1侧滑角

图8 仿真条件1滚转角

图9 仿真条件2侧偏距
由仿真结果图可以看出,当有侧偏距时,所设计的控制器具有较强的纠正侧偏距的能力,对平稳风和切变风具有较强的鲁棒能力。
4 结论
从工程实际应用出发,针对重复使用亚轨道飞行器无动力自动着陆的横侧向控制进行控制器设计,偏航通道提出的“角速度+侧向过载”控制方式能够快速消除侧滑角,滚转通道内回路采用“滚转角速度+滚转角”的控制方式能够精确快速的跟踪滚转角指令,首次推导了BTT方式下控制侧偏距回路的稳定性分析原理,并根据此原理设计了侧偏距回路的控制参数,仿真结果表明控制方案和参数可行有效,能够有效的消除侧偏距,并且对平稳风和切变风有较强的鲁棒性。
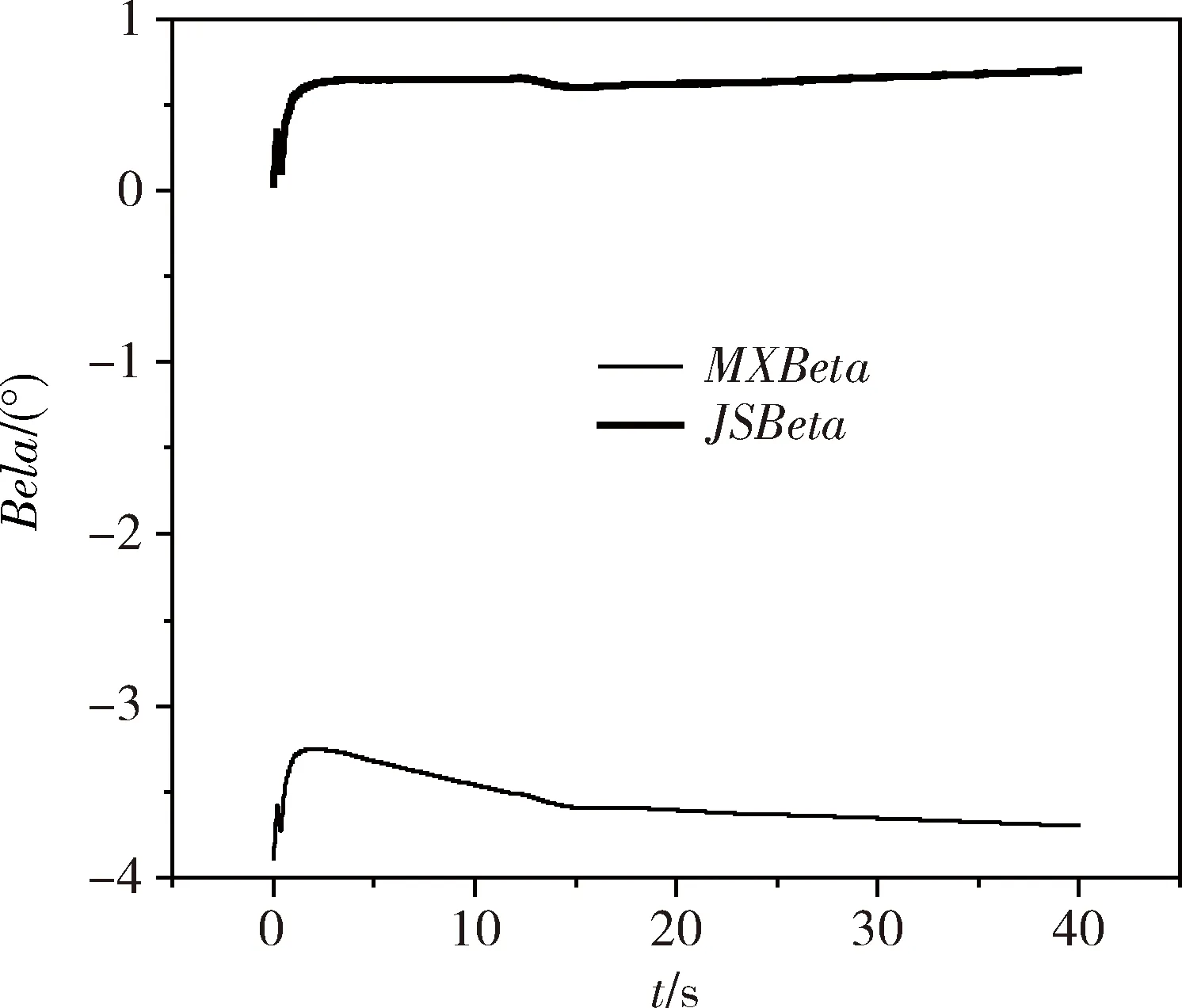
图10 仿真条件2侧滑角
[1] 赵汉元.大气飞行器姿态动力学[M].国防科技大学出版社,1987.
[2] 林德福.战术导弹自动驾驶仪设计与制导律分析[M].北京理工大学出版社,2012.
[3] 吴森堂.飞行控制系统[M].北京航空航天大学出版社,2005.
[4] 宋辉.复杂条件下无人机自动着陆控制技术研究[D].南京航空航天大学硕士论文,2011.
[5] 吴昊.无人机自动着陆控制[D].南京航空航天大学硕士论文,2003.
[6] VolKan K. Design of an Autonomous Landing Control Algorithm for a Fixed Wing UAV[D].Master of Science Thesis,Ankara,Middle East Technical University,2007.
TheUnpoweredAutolandingLateralControlDesignforSub-orbitalReusableLaunchVehicle
ZHAO Zhifang NI Shaobo JIA Zhiqiang MU Xiaomin
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Theunpoweredautolandinglateralcontrollerofsub-orbitalreusablelaunchvehicle(SRLV)isdesigned.Firstly,basedoninputfeedbackandoutputfeedbacktheory,theyawrateandyawcontrollerofyawloopareconvertedintoyawrateandoverloadcontrollerforSRLVisdesigned.Secondly,therollchannelcontrollerofrollrateandrolliscompleted,andthenaccordingtothestabilityanalysisprinciplesoflateraldeviationloopforBTTcontrolwhichhasbeenevolvedforthefirsttime,thefeedbackcontrollerparametersofthedeviateddistanceanddeviatedrateareestablished.Thesimulationresultsshowthatthecontrollerdesignednotonlycaneliminatethelateraldeviationeffectivelyandbutalsocancontrolthesidesliptozerorapidly.Mostimportantly,therobustnesstosteadywindandwindshearhasbeenverifiedbythesimulation.
Unpoweredautolanding;Lateralcontroller; BTT;Stabilityoflateraldeviationloop
2014- 02- 20
赵志芳(1986-),女,山西人,硕士,助理工程师,主要研究方向为导航、制导与控制;倪少波(1973-),男,湖北人,博士,研究员,主要研究方向为导航、制导与控制;贾志强(1982-),男,河北人,硕士,高级工程师,主要研究方向为导航、制导与控制;穆晓敏(1981-),女,山西人,博士,工程师,主要研究方向为导航制导与控制。
V448.2
: A
1006- 3242(2014)06- 0030- 04
