仿真和实物实验结合的机器人学课程实验教学
2014-08-10代小林梁莹林
代小林,梁莹林
(电子科技大学 机械电子工程学院,成都 611731)
·实验教学改革、探索与创新·
仿真和实物实验结合的机器人学课程实验教学
代小林,梁莹林
(电子科技大学 机械电子工程学院,成都 611731)
机器人学课程实验涉及内容多、知识面宽,能锻炼和提高学生的动手能力。提出利用SimMechanics对机器人实验中的运动学反解、轨迹规划等环节进行充分的仿真分析,再通过实物实验加以验证的实验教学方法。利用该方法进行实验教学增加了学生对知识的理解,取得了良好的效果。
机器人学实验;SimMechanics仿真;实验教学;实物实验
机器人学是机械工程、自动化等相关专业的专业选修课,其课程实验涉及机器人的运动学分析、轨迹规划、控制算法等知识,能培养和锻炼学生的动手能力。由于实验学时与设备台套数有限,实验中要进行大量的公式计算、代码编程和调试,在以往的实验教学中,学生并没有足够的时间掌握机器人运动学、轨迹规划和控制器的设计方法[1]。另外,机器人实验设备要求较高,由本科低年级学生使用时,常出现因控制参数设置不当造成设备损坏甚至伤人的危险情况。
因此,提出利用机器人仿真软件[2]和实物实验结合的实验教学方法,即学生先利用Matlab/SimMechanics软件[3]建立实验教学中所用的多关节机器,设计单关节控制器,搭建运动学分析和轨迹规划模块;然后,通过仿真软件对各算法进行验证;最后,安全有效地进行机器人实物操作实验。
本文介绍了使用Matlab/Simulink中的SimMechanics工具箱建立机器人的刚体模型、单关节PID控制器、运动学模块、轨迹规划模块、机器人实验系统及控制软件,总结了这种仿真和实物实验相结合的实验教学方法的意义。
1 基于SimMechanics的机器人建模
1.1 机器人本体建模
典型多关节机器人如图1所示,它由底座、旋转大臂、旋转小臂、升降手三个关节组成,可实现三维空间的自由运动。

图1 多关节机器人示意图
SimMechanics工具箱为多体机械动力学系统提供了直观有效的建模分析手段,所有工作均在Simulink环境中完成。该工具箱[4]提供大量对应实际系统的元件,如刚体、铰链、约束、坐标系统、作动器和传感器等。建立多关节机器人本体模型如图2所示。
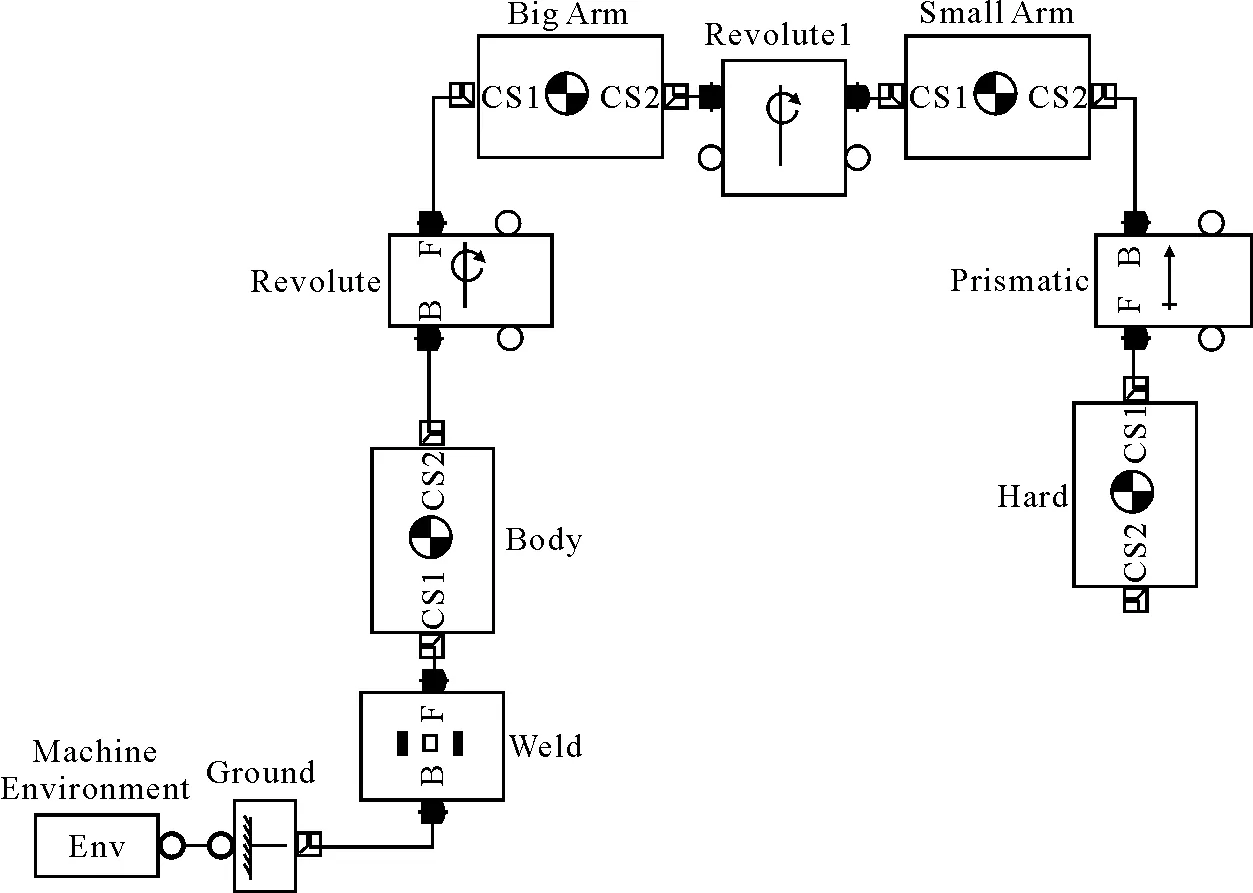
图2 基于SimMechanics的机器人本体模型
利用SimMechanics工具箱提供虚拟显示功能,机器人的三维模型如图3所示。
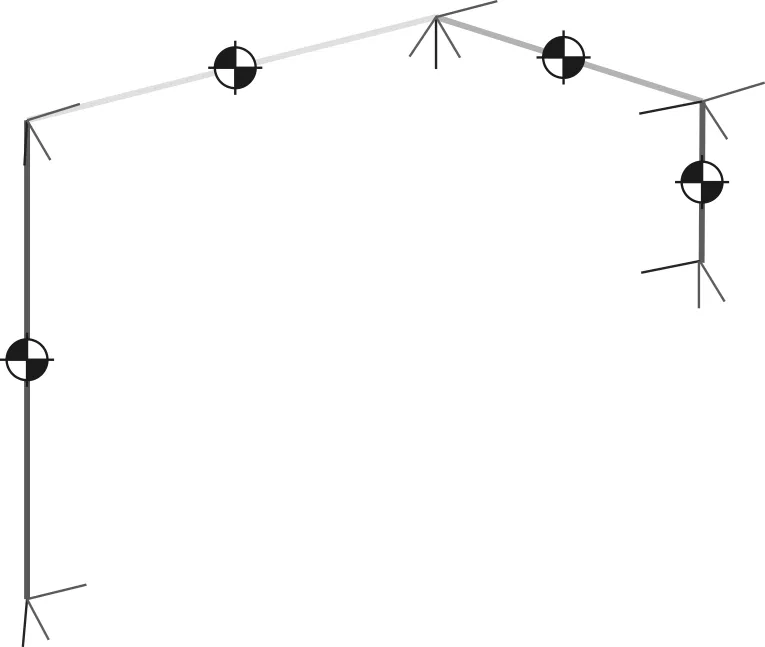
图3 机器人的虚拟样机
1.2 机器人的控制模块
SimMechanics提供了传感器、作动器模块,通过这两类模块,Simulink工具箱可以直接与机器人模型交互。单关节PID控制器[5]框图如图4所示。
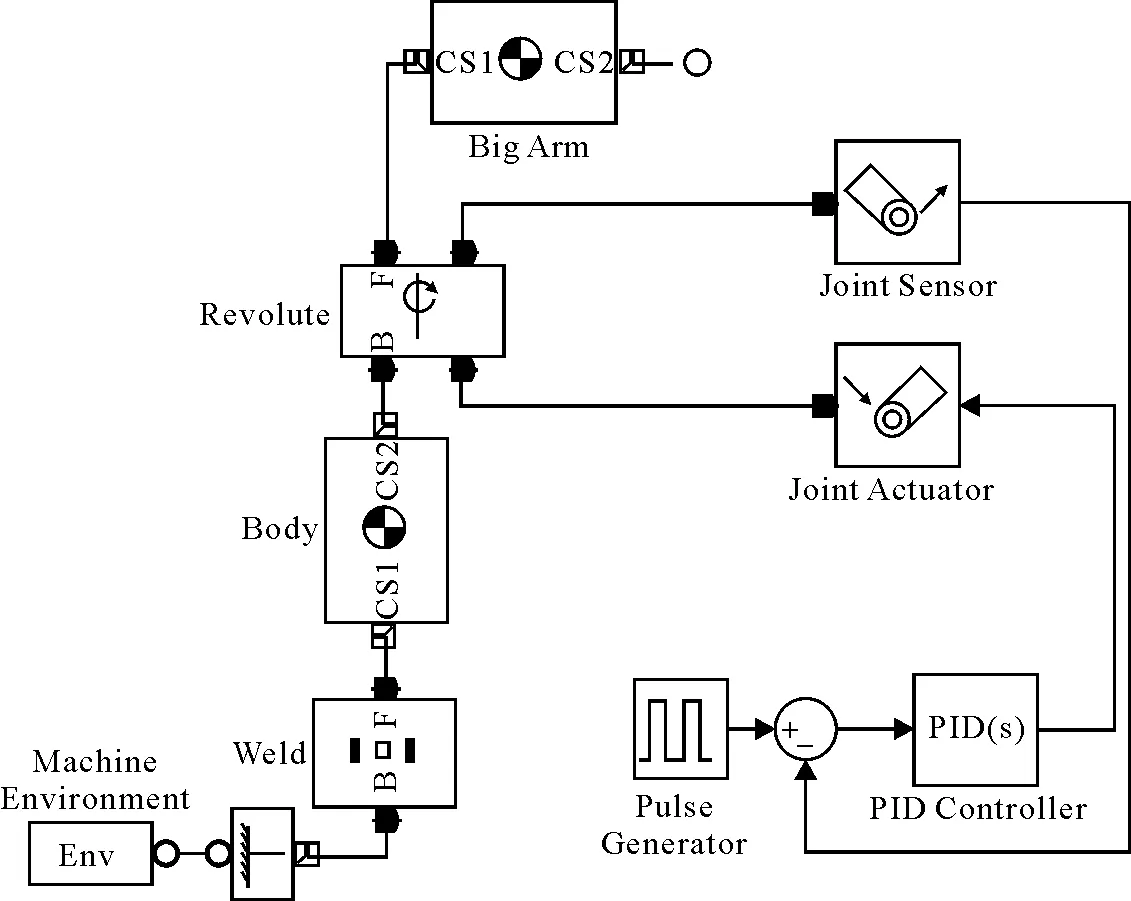
图4 机器人的单关节控制框图
本实验在关节空间进行轨迹规划,即给定机器人在起始点、终止点的坐标,然后,通过运动学解算出起始点和终止点关节臂的角度和距离值。根据机器人的运动学反解算法,可解得大臂与基座之间的关节角θ1:
大臂与小臂之间的关节角θ2:
(2)
升降手的关节距离d:
d=l3-z
(3)
式中:x、y、z为关节机器人末端的坐标,单位为m;l1、l2、l3为机器人大臂、小臂和升降手的杆长尺寸,单位为m。
本实验采用三次多项式进行插值,即需要4个参数确定机器人各关节的轨迹。根据机器人在起始点和终止点的位移和速度四个约束条件,可得到三次多项式的系数:
(4)
式中:θ0为关节变量θ1、θ2和d的初值;θf为关节变量θ1、θ2和d的终值;tf为从起始点运动到终止点的时间。
依据上述参数,即可得机器人关节的插值轨迹:
θ(t)=a0+a1t+a2t2+a3t3
(5)
当用SimMechanics完成机器人本体和单关节控制模块的搭建后,即可用Simulink工具箱按照式(1)~式(5)编写运动学分析反解及轨迹规划算法,并开展仿真和调试工作。
2 机器人实物实验
多关节机器人实验台由工业计算机、伺服电机控制卡、伺服电机驱动器、机器人机械本体组成,如图5所示。
实验室提供的软件框架用VC编写,该框架对控制卡的读写操作进行封装,设置了定时器、交互式界面等,学生利用该软件框架完成编程工作。软件的运行过程如下:

图5 机器人实验台
1)从界面上读取机器人起始点 (x0,y0,z0) 和终止点(xf,yf,zf)的坐标;
2)利用式(1)~式(3)编写运动学反解程序,计算出机器人各关节变量的初始值和终止值;
3)利用式(4)计算各关节的插值多项式的系数;
4)用VC的定时器进行计时,并在时间中断服务函数中按式(5)计算各关节变量的当前值,然后,调用控制电机运行的底层函数,控制机器人运动。
3 教学效果

4 结束语
将虚拟仿真和实物实验结合的方法应用于机器人学的实验教学中,让学生先设计算法后通过实验进行验证,加深了学生对知识的理解,使学生充分掌握机器人的基本理论、典型算法的分析和设计方法,为今后的学习和工作奠定扎实的基础。
该方法不仅使学生深入掌握机器人的相关知识,而且使其接触到计算机仿真的基本概念和原理,为系统地学习专业知识打下了坚实的基础。
[1] 熊有伦. 机器人技术基础[M].武汉:华中科技大学出版社,1996.
[2] 安爱琴.虚拟技术在液压与气压传动教学中的应用研究[J].河南科技学院学报,2012(12):100-102.
[3] 于凌涛, 张楠, 张立勋,等. 3-RPS并联机器人静力学研究及SimMechanics仿真[J]. 哈尔滨工程大学学报, 2010,31(8):1061-1065.
[4] 薛定宇. 控制系统计算机辅助设计—Matlab语言与应用[M]. 北京: 清华大学出版社, 2006.
[5] 胡寿松.自动控制原理[M].5版.北京:科学出版社,2007.
Experiment Teaching of Robotics Theory Course Combined withSimulation and Traditional Experiment
DAI Xiaolin LIANG Yinglin
(School of Mechatronics Engineering, University of Electronic Science and Technology of China, Chengdu 611731, China)
Robotics course experiment involves amounts of different fields and knowledges, which could improve the abilities of students. SimMechanics is proposed to adequately simulate the inverse kinematics, trajectory planning and other aspects in the course, and then practical experiments are utilized to verify the algorithm. It helps students to understand the knowledge and is proved to be effective.
robotic experiment; SimMechanics simulation; experimental teaching; traditional experiment
2013-12-25;修改日期: 2014-02-12
中央高校基本业务费资助项目(ZYGX2012J106)。
代小林(1978- ),男,博士,讲师,研究方向:并联机器人、控制系统软件开发、电液伺服系统的智能控制。
TP273;G642.426
A
10.3969/j.issn.1672-4550.2014.06.021
