顾及障碍物的一般图形Voronoi图及其加权图的ArcGIS栅格实现
2014-08-08田松崔希民孙云华崔伟宏李文杰
田松,崔希民,孙云华,崔伟宏,李文杰
(1.中国矿业大学(北京)地球科学与测绘工程学院,北京 100083;2.中国科学院遥感与数字地球研究所,北京 100101)
Voronoi图是一种对空间无缝不重叠的最短距离分割方法[1],具有势力范围、侧向邻近、局域动态等特性[2,3],成功解决了找最近点、求最大空圆、求n个点的凸包、求最小树等问题[4],是计算几何的重要分支,广泛应用于物理、化学、分子生物、医学、地学等领域。在地学领域,Voronoi图可用于空间插值[5]、空间关系表达[6]、城市影响范围分析[7]、最优路径选取[8]、城市规划[9]、设施选址分析[10]等方面。
一般图形Voronoi图由普通Voronoi图生成元扩展为点、线、面而成,是对Voronoi图理论和应用的扩充,当前,该领域研究较为成熟。例如,张有会等[11]研究了一般图形Voronoi图的近似构造法;赵晔等[12]以距离表方式离散生成一般图形Voronoi图;曹清洁、安志宏、董雪等[13-15]先后研究了障碍物Voronoi图的离散生成及应用;Gong等[16]利用矢量方式生成了一般图形加权Voronoi图,并实现了点、线、面实体的插入和删除。关于一般图形Voronoi图与 GIS结合的应用研究,Dong[17]和范熙伟[1]分别以栅格方式和矢量方式结合GIS开发组件生成了点、线、面的Voronoi图及加权图,但二者算法均只能单独处理点、线、面生成元,限制了其应用范围,且未考虑障碍物情况。本文利用ArcEngine,以栅格结晶方式生成了顾及障碍物的一般图形Voronoi图及其加权图,该方法不需要考虑生成元形状,避免了计算Voronoi边界形状的大量计算,实现简单。同时与ArcGIS软件紧密结合,为研究和发展GIS空间数据结构和模型提供了重要方法。
1 基本定义
1.1 一般图形加权Voronoi图定义
定义1[11]:设p为平面上的点,G为平面上的几何图形,定义p和G之间的距离为:

定义2:设Gi(i=1,2,…,n)为平面上互不相交的几何图形,λi(i=1,2,…,n)是给定的n个正实数,称V(Gi)是由生成元Gi确定的权重为λi的一般图形加权Voronoi图,当λ1=λ2=…=λn时,V(Gi)为一般图形Voronoi图。

1.2 一般图形障碍加权Voronoi图定义
定义3[18]:设G为平面上互不相交的几何图形,O为平面上的线状或面状障碍物,p1、p2为平面上的两个点。若从任一目标点开始,到达另一目标点的路径不与障碍物集合O相交或仅与边界相交,则称此路径经过的最短欧氏距离为p1与p2的障碍距离,记为d0(p1,p2)。定义p和G 的障碍距离为:

定义4:设Gi(i=1,2,…,n)为平面上互不相交的几何图形,λi(i=1,2,…,n)是给定的n个正实数,Oj(j=1,2,3,…,m)为平面上的线状、面状障碍物,称V(Gi)是由生成元Gi确定的权重为λi的一般图形障碍加权Voronoi图,当λ1=λ2=…=λn时,V(Gi)为一般图形障碍Voronoi图。

2 顾及障碍物的一般图形Voronoi图及其加权图结晶算法
2.1 算法的基本思想
所有被障碍物覆盖的栅格(记为障碍物栅格)赋予统一颜色值。所有被生成元覆盖的栅格(记为生成元栅格)指定相应颜色,保证不同生成元栅格之间颜色不同,同时与障碍物栅格颜色不同,赋予生成元栅格相应权重值。对于每类生成元栅格,选取边界栅格作为扩散中心,以指定规则向外结晶,并将结晶区域赋予同中心栅格相同的颜色。结晶过程中需检验:如果结晶区域已着色(包括已赋予其他类别生成元栅格颜色或障碍物栅格颜色),则越过;否则就以中心栅格对应的颜色着色结晶区域,当屏幕所有像素着色完成时,算法结束。这时,不同颜色区域间的边界即为Voronoi图的边界近似曲线。

图1 算法流程Fig.1 Algorithm flow chart
2.2 算法的实现步骤
输入:生成元集合Gi(i=1,2,…,n),为平面上互不相交的任意几何图形,包含属性PointID:生成元Gi的唯一标识;Color:Gi颜色,Weight:Gi权重,Gi.Weight=λi,障碍物集合Oj(j=1,2,…,m)。
输出:一般图形Voronoi栅格图或加权栅格图VR(Gi)(i=1,2,…,n);一般图形 Voronoi矢量图或加权矢量图Vv(Gi)(i=1,2,…,n)。
算法具体实现步骤如下:1)数据获取。从GIS矢量数据集中获取生成元集合Gi(i=1,2,…,n),障碍物集合Oj(j=1,2,…,m),保证任意生成元不重合,任意生成元与障碍物不重合;结晶速度集合Si(i=1,2,…,n);速度阈值thresh。2)生成Gi的最小外包矩形 MBR。3)栅格划分。设定栅格大小,将MBR划分为一系列正方形栅格集合Rk(k=1,2,…,z),包括属性GridID:栅格Rk的唯一标识;PointID:生成元标识,拥有相同PointID的栅格为一类生成元栅格;Color:栅格颜色;CurrentSpeed:记录算法执行过程中的实时结晶速度;Original-Speed:记录原始结晶速度,该值恒定,由生成元权重确定;State:当前栅格状态,由Before、Now和Next 3种状态组成,分别表示栅格“已参与完操作”、“正参与操作”和“等待参与操作”。4)障碍物区域赋值。递归循环R,如果Rk∩Oj≠Φ,则令Rk.Corlor=ζ,ζ为恒定正整数,表示该栅格为障碍物区域。5)生成元区域赋值。递归循环R,如果Rk∩Gi≠Φ,则令Rk.PointID=Gi.PointID,Rk.Color=Gi.Color,Rk.OriginalSpeed=Si,Rk.CurrentSpeed=Si,Rk.State=Now。如果Rk∩Gi=Φ,则令Rk.PointID=-1,Rk.Color=-1,Rk.OriginalSpeed=-1,Rk.CurrentSpeed=-1,Rk.State=Next。6)区域结晶。递归循环R,如果Rk.State=Now,同时Rk.PointID>0,表示Rk是“正参与操作”的生成元栅格,可以参与结晶过程。如果选择一般图形障碍加权Voronoi结晶,则计算Rk结晶速度speed,speed=Rk.Original-Speed+Rk.CurrentSpeed,若speed>thresh,按相应结晶规则获取Rk周围栅格Rq(q=1,2,…,x),如果Rq.PointID>0或Rq.Color=ζ,说明该位置已经被填充,继续下一次递归;否则令Rq.PointID=Rk.Point-ID,Rq.Color= Rk.Color,Rq.OriginalSpeed=Rk.OriginalSpeed,Rq.CurrentSpeed=speed-thresh,Rk.State=Before。如果speed<thresh,则令Rq.CurrentSpeed=speed,继续下一次递归。如果选择一般图形障碍Voronoi图结晶,则按相应结晶规则获取Rk周围栅格Rq(q=1,2,…,x),如果栅格Rq.PointID>0或Rq.Color=ζ,说明该位置已经被填充,继续下一次递归,否则令Rq.PointID=Rk.PointID,Rq.Color= Rk.Color,Rk.State=Before。7)状态更新。递归循环R,如果Rk.PointID>0,同时Rk.State=Next,令Rk.State=Now。如果全部PointID>0,算法结束,否则执行步骤6。8)数据输出。输出文件为一般图形Voronoi栅格图或加权栅格图VR,根据实际需要可以将其转化为矢量图或加权矢量图Vv,一并输出。
2.3 关于算法的几点说明
2.3.1 结晶规则 Voronoi图离散生成方式包括距离表法和结晶法等。由于结晶法模型众多,实现灵活,固选作本文算法的主要实现方式,可根据实际需要,选择相应结晶方式。常见结晶规则如下[13]:4-模板(图2a),生成元以菱形方式生长;8-模板(图2b),生成元以正方形方式生长;4-模板、8-模板交替(图2c),生成元以近似圆形方式生长。3种结晶规则分别对应数字图像中3种不同的距离度量方法[19]:


图2 图像结晶规则及距离度量方法[13]Fig.2 Image crystallization rule and distance measurement method
2.3.2 颜色的确定及边界提取 Gi的颜色属性可以是灰度值或RGB值,相应生成VR(Gi)灰度图或RGB图。算法执行前设定颜色方式,Color值为随机生成。在VR(Gi)生成后,通常需要标定不同类型生成元栅格间的Voronoi边,称为Voronoi边的近似抽出,其实质是栅矢转换的过程。在ArcEngine中,提供相关接口实现栅矢图转换。
2.3.3 结晶速度确定 算法结晶速度确定如下:

由式(8)和式(9)可知:Si的最大值为1。
根据2.2步骤(6)给出的公式:Rk.OriginalSpeed=Si,Rk.CurrentSpeed=Si,speed=Rk.OriginalSpeed+Rk.CurrentSpeed。令thresh=1,判断栅格Rk扩张的条件是如果speed>1,则扩张,Rk.CurrentSpeed=speed-1;否则Rk.CurrentSpeed=speed。
3 应用实例
利用本文算法,针对不同生成元和障碍物(图3)可生成不同类型Voronoi图:点Voronoi图及加权图、线Voronoi图及加权图、面Voronoi图及加权图和一般图形Voronoi图及加权图等,同时以上情况还可分为顾及障碍物及未顾及障碍物两种情况。下面给出利用本算法得到的3个实例:1)一般图形Voronoi图(图4);2)一般图形加权 Voronoi图(图5);3)顾及障碍物的一般图形加权Voronoi图(图6)。图4、图5的生成元位置、形状一致,由于其权重不同,造成Voronoi图形状的差异。
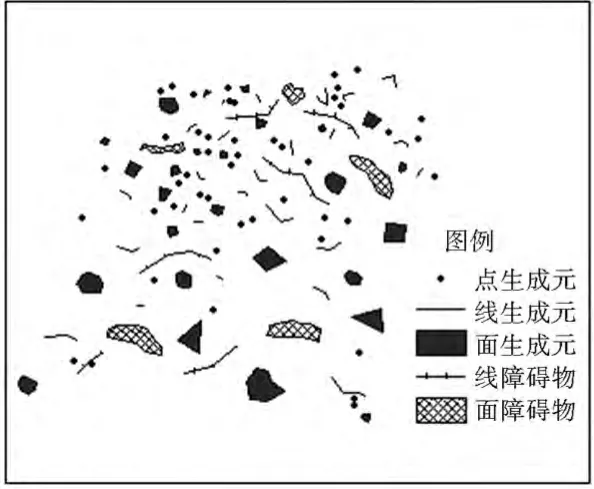
图3 生成元和障碍物Fig.3 Generators and obstacles

图4 一般图形Voronoi图Fig.4 Voronoi diagram for general figures

图6 一般图形障碍加权Voronoi图Fig.6 Weighted Voronoi diagram with obstacles for general figures
4 结论
本文借鉴了一般图形Voronoi图、加权图及障碍物Voronoi图等研究,利用C#和ArcEngine,以栅格结晶方式生成了顾及障碍物的一般图形Voronoi图及其加权图,取得较好的实验效果。相比以往研究,该算法有如下优点:1)与文献[1]、[16]等矢量实现方式相比,该算法中不需要考虑生成元的形状,点、线、面均可作为生成元,避免了矢量方法中计算Voronoi边界形状的大量计算。同时,考虑了线状、面状障碍物的情况,扩展了算法的应用范围。2)与文献[12-15]、[17]等栅格实现方式相比,该算法利用GIS开发组件编程实现,可移植性强,功能灵活,如可选择不同的结晶方式(棋盘距离、城区距离和欧式距离等)、不同的生成元输出方式(点生成元输出、线生成元输出、面生成元输出或三者的任意组合输出)、不同的文件输出格式(灰度图像、RGB图像、GIS矢量图)及是否加权、是否考虑障碍物等;在输出GIS矢量文件时,可选择是否包含生成元标识、颜色、权重等属性信息。该算法为研究和发展GIS空间数据结构和模型提供了重要方法,扩展了Voronoi图在地学领域的应用。
[1] 范熙伟.加权Voronoi图矢量生成算法研究及其实现[D].西安:西北大学,2011.
[2] GOLD C M.The meaning of neighbor[J].Lecture Notes in Computing Science,1992(39):220-235.
[3] 陈军.Voronoi动态空间数据模型[M].北京:测绘出版社,2000.
[4] 张有会,李秀丽,杨立平,等.Voronoi图画法的改进与实现[J].计算机科学,1999,26(11):86-87.
[5] LOWELL K,GOLD C.Using a fuzzy surface_based cartographic representation to decrease digitizing efforts for natural phenomena[J].Cartography and GIS,1995,22(3):222-231.
[6] 赵仁亮.基于Voronoi图的空间关系计算研究[D].长沙:中南大学,2002.
[7] 王新生,刘纪远,庄大方,等.Voronoi图用于确定城市经济影响区域的空间组织[J].华中师范大学学报(自然科学版),2003,37(2):256-260.
[8] SHARIFZADEH M,SHAHABI C.Processing optimal sequenced route queries using Voronoi diagrams[J].GeoInformatica,2008,12(4):411-433.
[9] 覃瑜,师学义.利用Voronoi图的城乡居民点布局优化研究[J].测绘科学,2012,37(1):136-138.
[10] 张伟松.基于Voronoi图的数字电视地面广播站选址分析[D].北京:中国测绘科学研究院,2011.
[11] 张有会,浅野哲夫,小保方幸次,等.关于一般图形Voronoi图的近似构造法的研究[J].数值计算与计算机应用,2002(3):216-225.
[12] 赵晔,张有会,赵志辉,等.关于一般图形Voronoi图的离散构造法的研究[J].计算机应用与软件,2004,21(6):76-78.
[13] 曹清洁.障碍Voronoi图的结晶生成[D].石家庄:河北师范大学,2004.
[14] 安志宏.线段障碍城市Voronoi图的结晶生成[D].石家庄:河北师范大学,2007.
[15] 董雪.障碍Voronoi图性质及其应用研究[D].哈尔滨:哈尔滨理工大学,2011.
[16] GONG Y X,LI G C,TIAN Y,et al.A vector-based algorithm to generate and update multiplicatively weighted Voronoi diagrams for points,polylines,and polygons[J].Computer &Geoscience,2012,34:118-125.
[17] DONG P L.Generating and updating multiplicatively weighted Voronoi diagrams for point,line and polygon features in GIS[J].Computer & Geoscience,2008,34:411-421.
[18] BERTIN E,CHASSERY J M.3-D Voronoi diagram:Application to segmentation[A].International Symposium on Voronoi Diagrams in Science and Engineering[C].1992.197-200.
[19] 章毓晋.图像处理和分析基础[M].北京:高等教育出版社,2002.
