基于变步长扰动观察法的MPPT仿真分析❋
2014-08-07郭昆丽宋小荣
郭昆丽,宋小荣,张 睿
(西安工程大学电子信息学院,西安710048)
基于变步长扰动观察法的MPPT仿真分析❋
郭昆丽,宋小荣,张 睿
(西安工程大学电子信息学院,西安710048)
为了更好地跟踪光伏发电系统的最大功率点,在MATLAB/Simulink环境下,搭建了光伏电池阵列仿真模型,根据其输出的U-I、P-I和P-U特性曲线分析了光伏电池阵列的非线性特性。基于光伏电池的动态特性,采用一种变步长的扰动观察法来实现光伏电池阵列的最大功率点跟踪。仿真结果表明,该方法能够快速稳定准确地进行最大功率点跟踪。
光伏电池阵列;MATLAB/Simulink仿真;最大功率点跟踪;扰动观察法
1 引 言
随着能源危机的加重和人们对清洁能源的广泛使用,光伏发电技术已越来越被人们所重视[1-3]。但在光伏发电系统中,光伏电池的输出特性由于受到光照强度以及电池温度的影响而不断变化,呈现明显的非线性,只有在某一特定电压条件下才能输出最大功率。因此,需要对光伏电池阵列进行最大功率点跟踪(maximum power point tracking,MPPT)来提高系统发电效率[4]。
目前常用的实现MPPT的方法有恒定电压法、电导增量法、扰动观测法等。其中,恒定电压法控制精度低,仅适用于小功率情况。电导增量法控制算法复杂,对采样的精确度要求很高,跟踪速度较慢[5]。而扰动观察法因其控制算法简单,测量参数少、跟踪效率高而得到了广泛应用[6]。,然而固定步长的扰动观察法存在扰动步长难以确定的问题,容易引起振荡和误判,使系统不能准确地跟踪到最大功率点[7]。基于此,采用一种变步长的扰动观察法,以电压调节电路的占空比D作为控制参数对最大功率点进行跟踪。仿真结果表明,该方法能够在快速跟踪最大功率点变化的情况下保证跟踪精度。
2 光伏阵列建模仿真
光伏电池的原理是基于半导体的光生伏打效应将太阳辐射能直接转换为电能。其等效电路模型如图1所示。当光照恒定时,由于光生电流Iph不随光伏电池的工作状态而变化,因此在等效电路中可以看作是一个恒流源。光生电流流过负载,从而在负载两端建立起端电压Uoc。负载端电压反作用于光伏电池的P-N结上,产生一股与光生电流方向相反的电流ID。由图1可得光伏电池特性的一般公式:

图1 光伏电池等效电路

其中,IL是光伏电池的输出电流;T为光伏电池板表面温度;q是单位电荷,其值为1.6×10-19C;k是玻尔兹曼常数,其值为1.38×10-23J/K;A为二极管理想常数,其值常在1~2之间变化。通常情况下,式(1)中的(V+RsIL)/Rsh项远远小于光伏电池输出电流,因此该项可以忽略。据此可以得到简化的光伏电池模块输出特性方程,np,ns分别为光伏电池板的串、并联个数:

基于图1和(2)式,在MATLAB/Simulink环境下,搭建光伏电池阵列的仿真模型,如图2所示。光照强度S、温度T、电压Upv作为输入,电流Ipv、Ppv(输出功率P=UpvIpv)作为输出。输入变量Upv在0~25V之间,温度T=25℃,光照强度在200~1000W/m2之间。
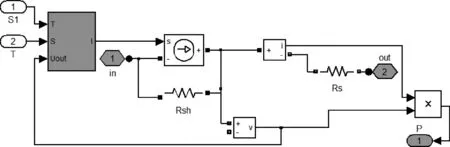
图2 光伏电池阵列仿真模型
仿真得到光伏电池阵列的I-U、P-I和P-U特性曲线分别如图3、图4、图5所示。
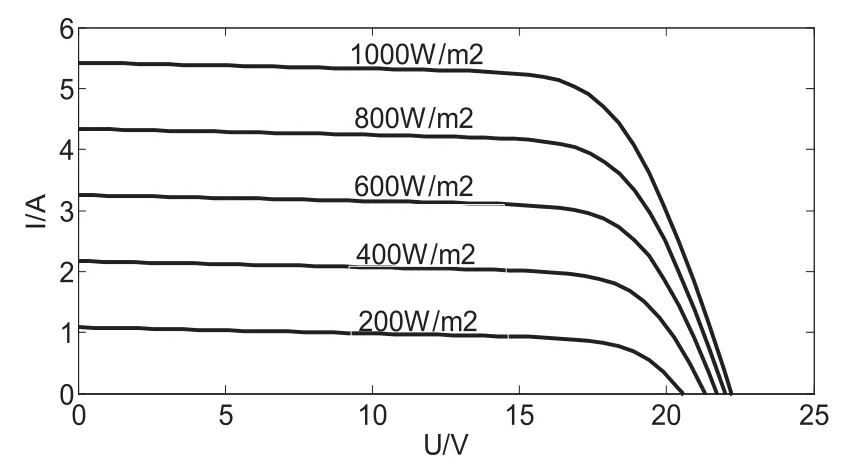
图3 光伏电池阵列I-U曲线
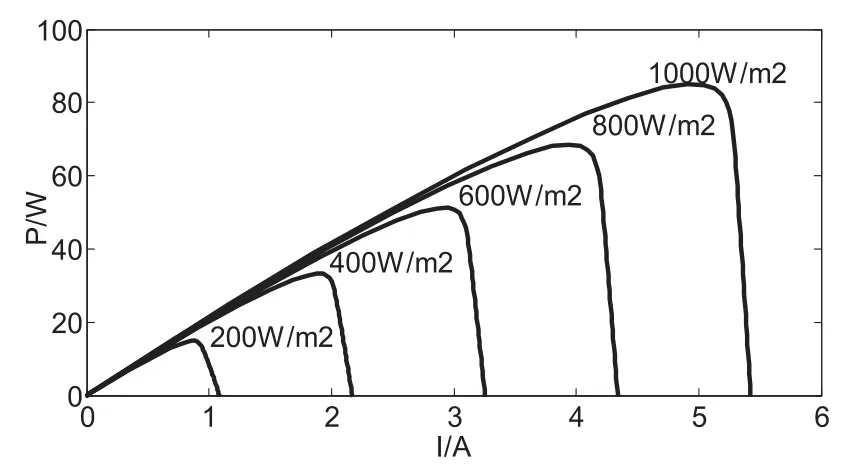
图4 光伏电池阵列P-I曲线

图5 光伏电池阵列P-U曲线
从仿真结果曲线可以看出:①光伏电池在低压段近似为恒流源,在接近开路电压时近似为恒压源;②光照强度变化很大时,光伏电池的短路电流变化很大而开路电压和最大功率点电压变化不大;③输出功率随着光照强度的升高而升高,并在某一点处达到最大值。因此,需要在光伏阵列和负载之间加装MPPT控制装置来实现不同环境下的最大功率输出。
3 变步长扰动观察法实现最大功率点跟踪技术
将光伏阵列接入Boost升压电路,在负载阻抗一定的前提下,只需调节Boost升压电路的占空比即可实现最大功率点电压的跟踪[8]。传统的扰动观察法中扰动步长为一个固定值,当步长较大时,对外界环境变化响应速度快,但会导致工作点在最大功率点附近反复振荡;步长较小时,能在一定程度上减弱工作点在最大功率点附近的振荡,但系统对外界环境变化的响应速度变慢[9],降低了光伏系统的发电效率。因此,为了改善扰动观察法的跟踪效果,选取合适的扰动步长是十分关键的,要兼顾光伏发电系统动态响应速度和稳态下的控制精度。
工作点远离最大功率点时如何进一步逼近是此方法的关键[10]。如图5所示,比较光伏阵列当前的工作电压U和最大功率点(maximum power point,MPP)电压Umax,当U<Umax时,系统运行在MPP左边,功率对电压导数比的绝对值|dP/dU|在接近MPP时逐渐变小。当U>Umax时,系统运行在MPP右边,|dP/dU|在远离MPP时逐渐变大。基于此,可根据功率值的变化情况在线自动调整扰动占空比值:

其中,ΔP为第k次扰动后与之前的功率差,Δd(k)为占空比D的调整步长(0<Δd(k)≤1),M为比例因子,f(k)为符号变量,决定占空比D的扰动方向,取1和-1。
由式(3)可以看出,当ΔP变化较小时,Δd(k)值也较小,表示功率的变化主要是由于占空比步长的调整引起的;当ΔP变化较大时,Δd(k)值也较大,表示功率的变化主要是由外界因素造成的,此时加大调整步长,即可快速跟踪到新的最大功率值点,具有一定的自适应能力。
比例因子M是由系统特性决定的,并且对初始运行条件极为敏感,所以可以在系统起始时施加一个最大安全扰动步长 Δdmax,分别得到扰动后的ΔPmax和ΔUmax,则初始条件下的M=|ΔUmax|Δdmax/|ΔPmax|。M代表了系统柔韧性,M越大,系统反应越灵敏[11]。
根据上面的讨论,可得到此变步长扰动观察法的流程图如图6所示。首先,检测光伏电池阵列输出电压、电流值,并计算当前时刻与上一时刻的功率差值ΔP=P(K)-P(K-1)。为了减小稳定条件下的振荡损失,设置一个振荡阈值ΔPth,认为ΔP位于此区间范围内时系统达到最大功率点。当ΔP>ΔPth,计算下一时刻扰动步长,并判断步长的扰动方向,下一时刻的扰动方向由Δdk的正负决定。
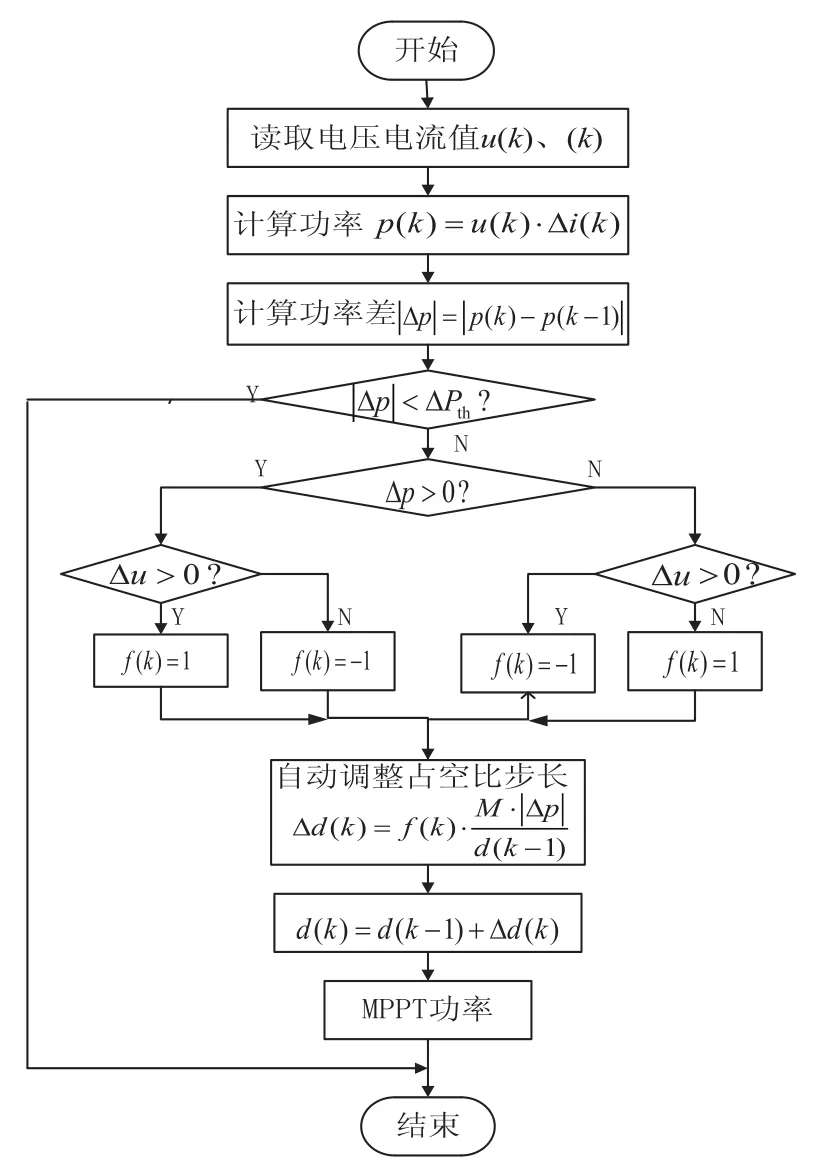
图6 扰动观察法算法流程图
4 仿真结果分析
采用Boost升压电路,建立了以变步长扰动观测法为理论基础的最大功率点跟踪控制仿真系统。MPPT控制模块的输入端分别为光伏电池的输出电压和输出电流,输出端为控制Boost升压电路中功率开关器件的脉冲信号。在Matlab中搭建系统仿真模型如图7所示,设置光伏电池阵列主要参数为:短路电流Isc=5.45A,开路电压Uoc=22.5V,最大功率点电流Im=5.2A,电压Um=17.2V。设置定步长扰动算法的步长分别为0.01和0.001,仿真结果如图9、图10。设置基于变步长扰动算法的步长初始值为0.01,比例因子M为0.0002,仿真结果如图11。用函数信号发生器模拟光照强度,初始值设置为1000W/m2,0.2秒时降为200W/m2,仿真时间设定为0.4s,得到图8所示的仿真结果。
从仿真结果对比图可以看出,当采用较大步长0.01时虽然跟踪速度较快,但达到稳态后输出功率波动较大,不够稳定,光伏电池的转换效率略低。采用较小步长0.001时,稳态误差和振荡都较小,但跟踪速度较慢。而对于变步长的扰动观察法,光照强度为1000W/m2,光伏电池阵列的最大输出功率为89.4W,达到稳定的时刻为0.13s;光照强度为200W/m2时,光伏阵列模型的最大输出功率为10W,达到稳定的时刻为0.3s。不仅动态响应速度快而且对外界环境的响应也比较迅速,稳态误差小。MPPT仿真结果中,Boost电路输入端的相应功率分别为89.1W和9.8W,输出端的功率分别为87.8W和9.7W。以上数据表明,此变步长扰动观察法能够适应外界环境的快速变化,比传统的扰动观察法能够更好地满足跟踪时间和跟踪精度的要求。
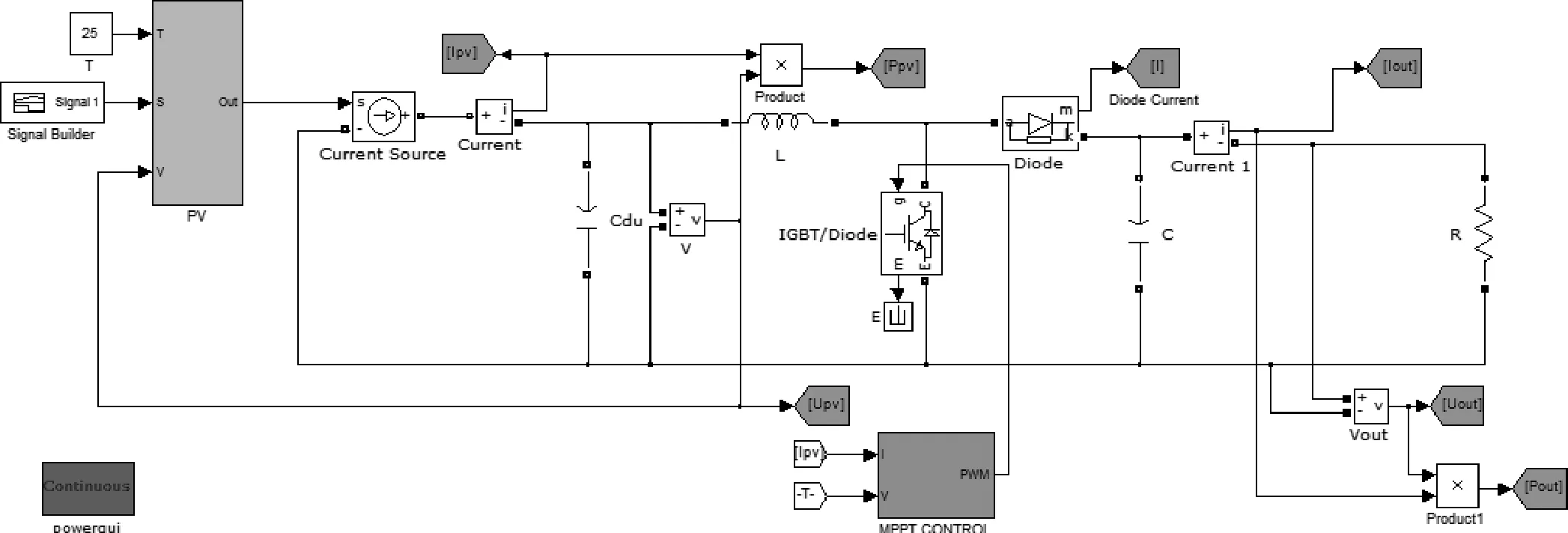
图7 光伏电池阵列模型MPPT控制仿真系统

图8 光照信号强度
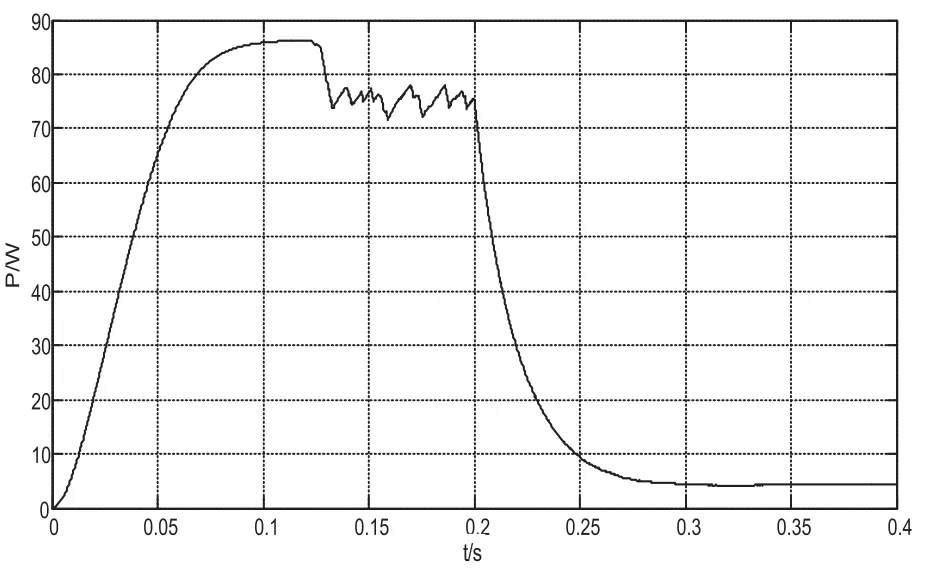
图9 步长为0.01时输出端功率曲线
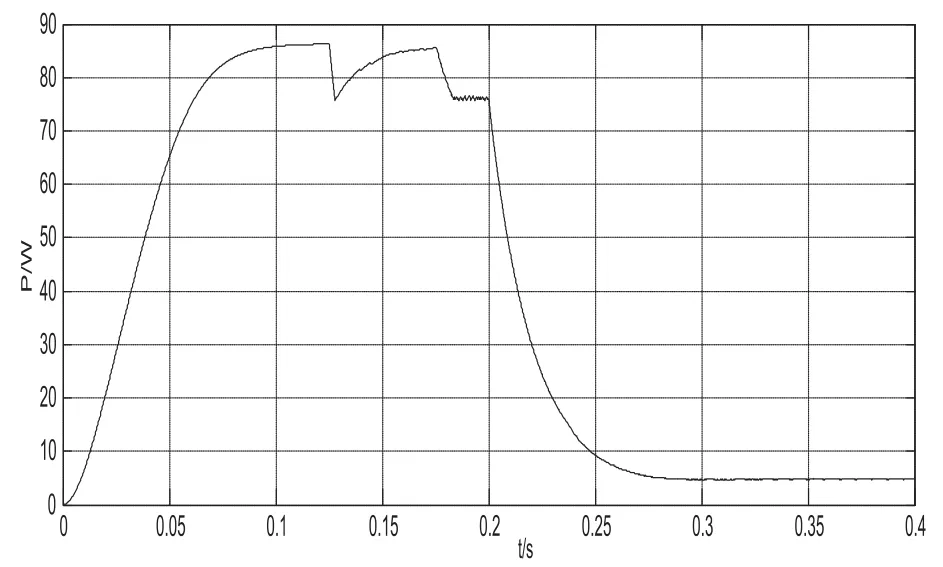
图10 步长为0.001时输出端功率曲线

图11 变步长扰动观察法输出端功率曲线
5 结束语
在分析了光伏电池等效电路和数学模型的基础上,利用MATLAB/Simulink仿真平台,建立了仿真模型,对不同光照强度的光伏电池阵列的输出特性进行了分析和研究。在此基础上搭建了Boost升压电路,运用变步长扰动观察法实现了光伏电池的最大功率点跟踪。仿真结果表明此方法能够准确快速的跟踪光伏电池的最大功率点,具有较高的稳定性和控制精度。
[1]郭勇,孙超,陈新.光伏系统中最大功率点跟踪方法的研究[J].电力电子技术,2009,43(11):21-23.GUO Yong,SUN Chao,CHEN Xin.Research on Maximum Power Point Tracking Method for Photovoltaic System[J].Power Electronics,2009,43(11):21-23.
[2]赵争鸣.太阳能光伏发电及其应用[M].北京:科学出版社,2005.ZHAO Zhengming.Development and Application of Solar Photovoltaic[M].Science Press,2005.
[3]黄礼明,连永圣,陈标龙,等.基于扰动观察法的MPPT控制优化策略[J].现代电子技术,2012,34(24):206-208.HUANG Li-ming,LIAN Yong-sheng,CHEN Biaolong,et al.Optimized MPPT Control Strategy Based on Perturbation and Observation Method[J].Modern Electronics Technique,2012,34(24):206-208.
[4]张兴,曹仁贤.太阳能光伏并网发电及其逆变控制[M].北京:机械工业出版社,2011.Zhang Xing,Cao Ren-xian.Solar Photovoltaic Gridconnected Power Generation and its Control Strategy of Grid-connected Inverter[M].China Machine Press,2011.
[5]张超,何湘宁.短路电流结合扰动观察法在光伏发电最大功率点跟踪控制中的应用[J].中国电机工程学报,2006,26(20):98-102.ZHANG Chao,HE Xiang-ning.Short-current Combined With Perturbation and Observation Maximumpower-point Tracking Method for Photovoltaic Power Systems[J].Proceedings of the CSEE,2006,26(20):98-102.
[6]路晓,秦立军.自适应扰动观察法在光伏MPPT中的应用与仿真[J].现代电力,2011,28(1):80-84.Lu Xiao,Qin Li-jun.Application and Simulation of Adaptive Perturbation and Observation Method in PV MPPT[J].Modern Electric Power,2011,28(1):80-84.
[7]Al-Diab,Ahmad,and Constantinos Sourkounis.Variable step size P&O MPPT algorithm for PV systems[J].Optimization of Electrical and Electronic Equipment(OPTIM),2010 12th International Conference on.IEEE,2010.
[8]宋亮,王晓东,刘雯,等.光伏电池MPPT扰动观察法的研究现状[J].半导体光电,2012,33(4):455-462.Song Liang,Wang Xiao-dong,Liu Wen,et al.Research of Perturbation and Observation Method for MPPT of PV Arrays[J].Semiconductor Optoelectronics,2012,33(4):455-462.
[9]朱铭炼,李臣松,陈新,等.一种应用于光伏系统MPPT的变步长扰动观察法[J].电力电子技术,2010,44(1):20-22.ZHU Ming-lian,LI Chen-song,CHEN Xin,et al.A Variable Step Size P&O MPPT Method for PV Systems[J].Power Electronics,2010,44(1):20-22.
[10]肖恩恺,唐军,刘凤鸣,等.基于变步长扰动观察法的MPPT研究与仿真[J].仪器仪表与分析监测,2012(3):35-38.Xiao En-kai,Tang Jun,Liu Feng-ming,et al.MPPT Simulation Research and simulation for PV Module based on adaptive variable step duty cycle perturbation and observation[J].Instrumentation Analysis Monitoring,2012(3):35-38.
[11]XiaoW,Dunford W G.A modified adaptive hill climbing MPPT method for photovoltaic power systems[C].//Power Electronics Specialists Conference,2004.PESC 04.2004 IEEE 35th Annual.IEEE,2004,3:1957-1963.
MPPT Simulation for PV Module Based on Adaptive Variable Step Perturbation and Observation
GUO Kun-li,SONG Xiao-rong,ZHANG Rui
(School of Electronic and Information,Xi’an Polytechnic University,Xi’an 710048,China)
In order to track themaximum power point effectively in photovoltaic systems,this paper sets up the simulation model of the PV module based on MATLAB/Simulink software and analyzes the non-linear output characteristics of the PV module according to its U-I,P-Iand P-U characteristic curves.The variable step disturbance observationmethod,based on the dynamic characteristics of the PV module,is used to track the maximum power point.Simulation results indicate that this module can rapidly and stably track themaximum power pointmuch better than the traditionalmethods.
Photovoltaic Array;MATLAB/Simulink Simulation;Maximum Power Point Tracking;Perturbation and Observation Method
10.3969/j.issn.1002-2279.2014.06.023
TM743;TP331
:A
:1002-2279(2014)06-0080-05
2014年度大学生创新创业训练计划项目(201403024)
郭昆丽(1974-),女,陕西西安人,副教授,主研方向:电力系统运行与控制。
2014-09-03